菜苗移植入穴装置机械手的设计与研究
2020-11-05邱文骁蔡佳麟马书美李颖姗苏欣强
邱文骁 蔡佳麟 马书美 李颖姗 苏欣强
(广州华夏职业学院,广东 广州510935)
国外研发农产品移植机器起步很早,特别是在20 世纪90年代以后,急速发展的自动控制技术以及传感器技术被应用到相应的移植设备上面,使其机械化、自动化的程度越来越高,并且全自动技术愈发稳定及高效,越来越趋向于智能化,实用化。本文设计的菜苗移植入穴装置,结合实际生产,对菜苗移植全自动移植关键部件——夹持动作部分进行优化设计以及实验研究,以期为全自动菜苗移植入穴装置的研制提供相应的思路与方法。
1 菜苗移植入穴装置建模设计
菜苗移植入穴装置主要由机械结构部分、夹持动作部分、输送机构部分构成,结构如图1 所示。
机械手部件设计图如图2 以及图3 所示,夹持动作部分主要是机械手模块,机械手安装于机架上并用于抓取输送机构的输送端面上的菜苗至菜苗穴板;机械手可沿机架的长、宽、高度方向运动,把它们分别定义为X,Y,Z 轴方向,X 轴电动机构用于带动抓取件沿机架的长度方向运动;Y 轴电动机构用于带动抓取件沿机架的宽度方向运动;Z 轴电动机构用于带动抓取件沿机架的高度方向运动。
2 夹持动作部分控制方案设计

图1 菜苗移植入穴装置3D 主视图

图2 机械手3D 设计图

图3 夹持动作部分示意图
基于菜苗移植入穴装置的机构设计以及工作原理,它是代替人工操作者把培育好的菜苗放置到穴盘中,比人工操作更加有效率并且更节省劳动力。夹持动作这部分最重要的便是穴苗的抓起与投放;穴苗的基质是土壤和营养液,有一定的强度,但是穴盘的摩擦力并不大,这个过程的主导者便是夹持(转下页)系统中的机械手,如果机械手的夹持力度过大则破坏了基质更有甚者会将整个穴苗都毁坏,如果机械手的夹持力度过小,则可能无法取出穴苗或者在取出的过程中导致穴盘的脱落;并且该系统有非线性、不确定性、多变性和强耦合等特点,特别是在其运动过程中,会有一些不确定非线性项,因此这个过程中需要控制电机的机械手作用力能够完美控制。在考虑系统的能控型、实用性以及对菜苗标本夹持的准确性,通过对菜苗移植入穴装置夹持动作部分的运行分析,建立其系统控制程序框图如图4 所示。
在图4 的程序框图中,步进电机是动力输出装置,驱动器接受控制器输出的脉冲信号,继而驱动步进电机的运行,步进电机经过减速微调对机械手进行带动动作,其偏移量会通过光电传感器反馈给控制器,控制器通过对反馈的数据与输入的期望数据相比较,获得两者之间位移的偏移量,从而调整输入的脉冲信号,实现夹持动作模块位移量的精确控制。

图4 夹持动作模块系统框图
3 模糊PID 控制器设计及仿真
在控制系统中,PID 控制器是一种将比例、积分、微分等控制结合起来的线性控制器,是国内外最早的控制策略之一,传统的PID 控制器因为算法结构简单,控制参数独立,可靠性高以及鲁棒性好,故在机械、电子、化工、冶金等行业中得到了广泛应用。PID 控制器的关键在于控制器参数的整定,由于系统中存在非常多的不确定性,这种不确定性会导致模型参数发生变化,所以更新算法,获得最优的参数组合。模糊控制(Fuzzy Control)是以模糊语言变量、模糊集合理论以及模糊逻辑推理为基础的计算机智能控制方法, 是近些年快速发展起来的新型控制器。该控制器能够以控制系统的输入输出数据作为依据,运用经验参数来编制系统的模糊控制规则,并运用该规则完成系统反馈数据的模糊化处理以及模糊推理过程,而后计算机根据实际响应,在线修正PID 参数,最终获得最适合系统的参数组合。本文设计的模糊PID 控制系统结构图5 所示。

图5 模糊PID 控制系统结构
依据建立好的数学模型,运用Matlab 中Simulink 的模块库建立步进电机控制系统模糊PID 参数模型,输入信号设定为幅值是1 的阶跃信号,模糊控制器接受偏差e 以及偏差的变化量ec,基本域为[-3,3],利用模糊算法在线修正PID 控制器的三个参数Kp,Ki,Kd,以期获得更好的仿真曲线图。
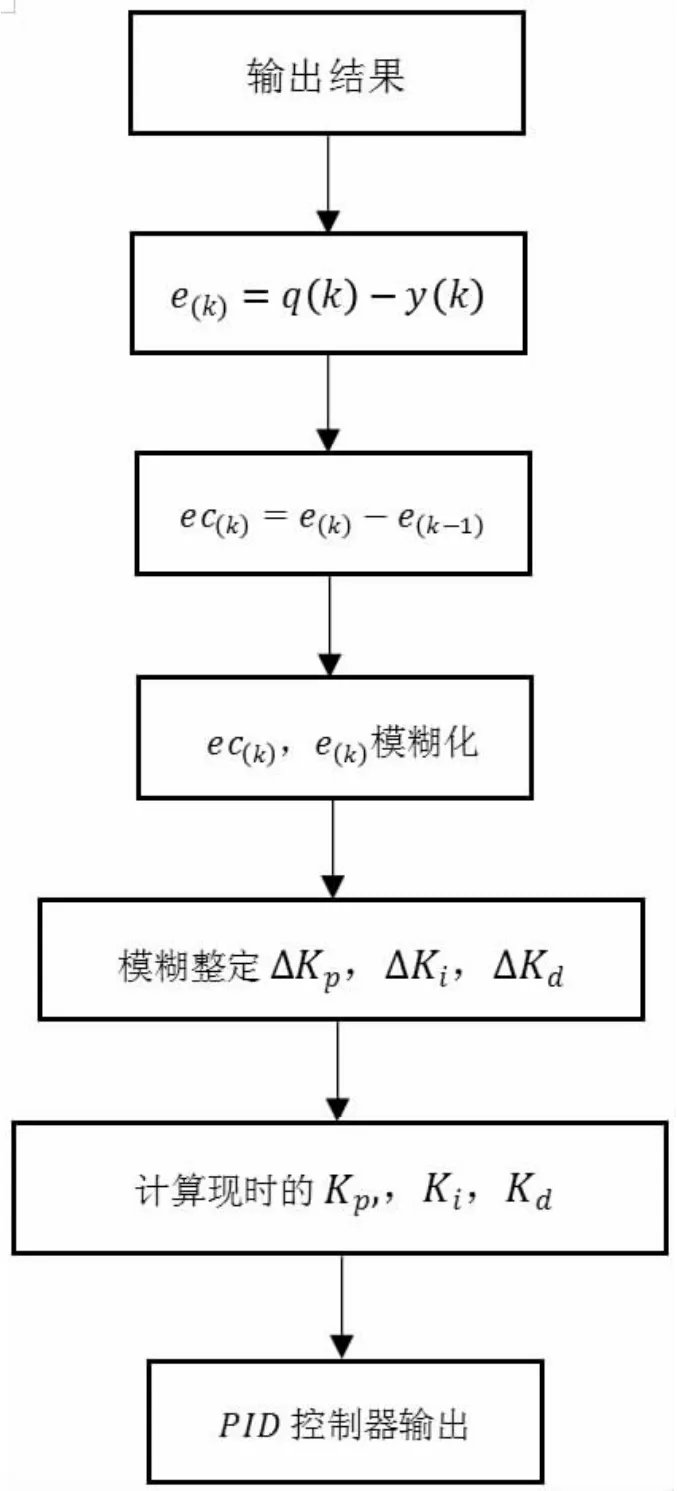
图6 模糊PID 控制算法流程图
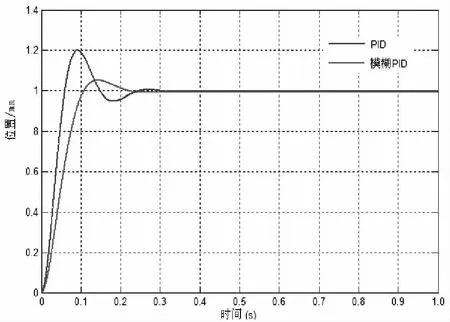
图7 步进电机控制系统响应曲线图
运行Simulink 中搭建的仿真模型,设定仿真时间为1s,将输出的模糊PID 仿真系统响应曲线图与传统PID 曲线图放置同一坐标分析,如图7 所示:单一PID 控制器上升时间大约是0.085s,在电机达到稳定运行状态之时,调节时间为0.3s,超调量约为20%;而模糊PID 控制器曲线上升时间大约是0.13s,调节时间为0.21s,超调量约为3%,响应曲线能够快速地到达稳定状态。由图像以及相应的数据可得出结论,运用模糊PID 控制器控制的步进电机系统相对于传统的PID 系统更具有调节时间更快捷,超调量更小,系统稳定性更可靠,使系统响应曲线更为平稳。因此,将模糊PID 控制器应用于菜苗移植入穴装置机械手夹持动作模块中,其优越性更为明显。
4 结论
为了实现菜苗移植入穴装置各个机构单元之间能够稳定可靠地协调配合运行,本文在原先设计菜苗移植入穴装置的基础上,结合实际生产,重新设计并改进其机械爪模型以及夹持动作模块的控制系统,在夹持动作模块中引入模糊算法以及PID 控制器,采用反馈调节的方法提高机械手的控制精度。并在Matlab 中的Simulink 仿真环境下建立模型,输出相应的响应曲线,通过响应曲线表明,尽管传统的PID 控制器能够有较快的响应速度,但是它的上升过程以及超调量相对模糊PID 控制器来说是不够理想的,具体表现在较大的超调量以及较为缓慢的上升过程;模糊PID 不但能够使得系统有较低的调节时间以及较高的稳态精度,而且能够使得系统响应曲线更为平稳,有较小的超调量,可以有效降低夹持动作系统因惯性而产生的过冲现象,因此,运用模糊PID 控制器为全自动菜苗移植入穴装置夹持动作系统的优化具有重要的作用。