基于直觉模糊证据合成的动态威胁评估
2020-11-05白永强杨风暴吉琳娜赵若静姚亚宁
白永强,杨风暴,吉琳娜,赵若静,姚亚宁
(中北大学信息与通信工程学院,山西 太原 030051)
0 引言
随着战场环境的日益复杂,有效利用战场信息辅助指挥人员作出科学决策成为战场研究的热点。对空中目标进行威胁评估,是指挥空战取胜的重要环节之一,为引导地面火力系统进行科学合理的火力分配提供参考依据[1-2]。因此,有效的空中目标威胁评估对于指挥决策具有重要意义。
目前常用的空中目标威胁评估方法众多。肖力铭[3]等人构建反映空中目标威胁的两级评估指标体系,运用直觉模糊集理论刻画指标间的相互关系,有效避免了评估主观性强的问题;王思远[4]等人利用变权理论来确定空中目标评价指标的客观权重,解决了评估结果过分取决于权重较大的指标的问题;陈德江[5]等人通过基于IFE的非线性规划模型和AHP法求取能够反映目标属性主客观信息的综合权重,解决了评估理论单一和忽视决策者偏好信息不足的问题。这些方法均旨在降低评估指标的模糊性和专家的决策偏差对权重的影响,从而使评估合理,却忽略信息融合过程中犹豫信息导致的评估结果不确定性增加;且评估方法均使用当前的目标测量信息进行评估,考虑到实际空战是一个动态过程,静态评估难以对连续空战态势进行客观全面的评估,导致空中目标威胁评估结果存在一定的片面性和不合理性。针对上述问题,本文提出基于直觉模糊证据合成的动态威胁评估。
1 目标评估指标权重计算
1.1 目标的威胁评估指标确立
科学的评估指标体系是威胁评估的基础,评估指标的确定是建立评估指标体系的关键一步。空中目标类型多样,特点多样,因此有必要选取能够从不同角度反映目标威胁程度的代表性因素作为评估指标[6-7]。本文结合战场实际情况,主要从目标作战能力与目标攻击意图两个大方面来考虑目标的威胁度评估,具体的指标如图1中的空中目标评估体系所示。

图1 空中目标评估体系Fig.1 Air target evaluation system
1.2 直觉模糊集
设X是一个论域,若X上两个映射μA:X→[0,1]和νA:X→[0,1],使得x∈X|→μA(x)∈[0,1]和x∈X|→νA(x)∈[0,1]并满足0≤μA(x)+νA(x)≤1,则称μA(x)和νA(x)确定了论域X上的一个直觉模糊集A,可简记为:
A={〈x,μA(x),νA(x)〉|x∈X}
(1)
πA(x)=1-μA(x)-νA(x)
(2)
式(1)、式(2)中:μA(x)和νA(x)分别称为A的隶属度函数和非隶属度函数;μA(x)和νA(x)为元素x属于A的隶属度和非隶属度;πA(x)为元素x属于A的犹豫度,用以描述元素x是否属于集合A的不确定程度,且满足0≤πA(x)≤1。
1.3 评估指标的权重确定
直觉模糊熵利用概率论作为测量信息的数学工具,克服了人类主观的直觉和模糊对不确定信息的影响;因此,利用直觉模糊熵确定了不同时刻的评估指标权重。文献[8]提出了新的度量方法,避免当两个直觉模糊集的隶属度和非隶属度有相同的差异时,无法区分不同的犹豫度直觉模糊集的问题。因此,本文采用文献[8]中所构建的改进的直觉模糊熵,计算公式如下:
(3)
目标评估指标的评估值用直觉模糊数表示,更小的直觉模糊熵值意味着更多的信息和更少的模糊性,即更好的选择。在此基础上,建立了目标函数最小化模糊熵的权重优化模型来求解目标评估指标权重。
(4)
权重约束条件:
(5)
式(5)中,H是权重的约束信息。
无约束条件权重计算:
(6)

2 基于直觉模糊证据合成的动态威胁评估模型
2.1 动态时间序列权重求解
空战目标数据中不同时间点对威胁评估的影响是不同的。要对空战形势的变化做出全面、客观的评价,就必须对不同的时间点进行时间序列赋权[9]。实战过程越接近于目标威胁评估的时刻,所测信息对目标威胁评估的影响越大。因此,采用逆泊松分布法确定时间序列权值。
(7)

2.2 动态信息融合方法
文献[10]提出的证据推理方法得到比较广泛的应用,是D -S证据理论应用于决策评估领域的代表性成果。该方法兼具了修正证据源与改进D -S合成规则的思想,但在合成过程中对未分配证据进一步细分,较简单地使用修正系数D -S规则效果更好。有m1和m2两条待合成的证据,其权重分别为ω1和ω2。

(8)
(9)
(10)
(11)
分配信度:
(12)
未分配信度:
(13)
2.3 算法流程
设在空战中遭遇m个目标,每个目标具有n个评估指标,即目标集为X={xi}(i=1,2,…,m),评估指标集为A={cj}(j=1,2,…,n),目标xi的评估指标cj的评估值表示为一个直觉模糊集aij=(μij,νij),决策矩阵{D1,D2,…,Dk,…,Dt}是一段时间内多个时刻获得的目标评估指标的直觉模糊初始决策矩阵。
1) 确定直觉模糊初始决策矩阵Dk
c1c2…cn
(14)
2) 根据式(4)—(6)确定目标的评估指标权重
(15)
3) 根据动态融合方法对直觉模糊初始决策矩阵Dk进行融合
(16)
(17)

4) 构造动态决策矩阵Y
D1D2Dt


(18)
5) 根据式(7)确定时间序列权重η=(η1,η2,…,ηk,…,ηt)。
6) 根据动态融合方法对动态决策矩阵Y进行融合:
(19)
(20)

7) 利用TOPSIS法[11]对目标进行威胁排序
第一步 计算目标的最终直觉模糊值与理想解的汉明距离:
正理想解:X+=(1,0),负理想解:X-=(0,1);

|β1(xi)+β2(xi)-1|)
(21)

|β1(xi)+β2(xi)-1|)
(22)
第二步 计算相似度:
S(X+,(β1(xi),β2(xi)))=

(23)
3 实例验证与分析
设在空战中,遭遇了4个目标来袭,分别为x1:巡航导弹,x2:战斗机,x3:轰炸机,x4:预警机;每个目标具有目标类型、电子干扰能力、目标高度、目标距离、航路捷径、目标速度、机动能力7个评估指标。取三个时间段t1、t2、t3探测的各目标评估指标数据,邀请三位军事专家给出三个时间段t1、t2、t3对应的D1、D2、D3三个直觉模糊决策矩阵。表1为各评估指标的探测数据,表2—表4分别为军事专家根据各时刻探测数据得到的直觉模糊初始决策矩阵。
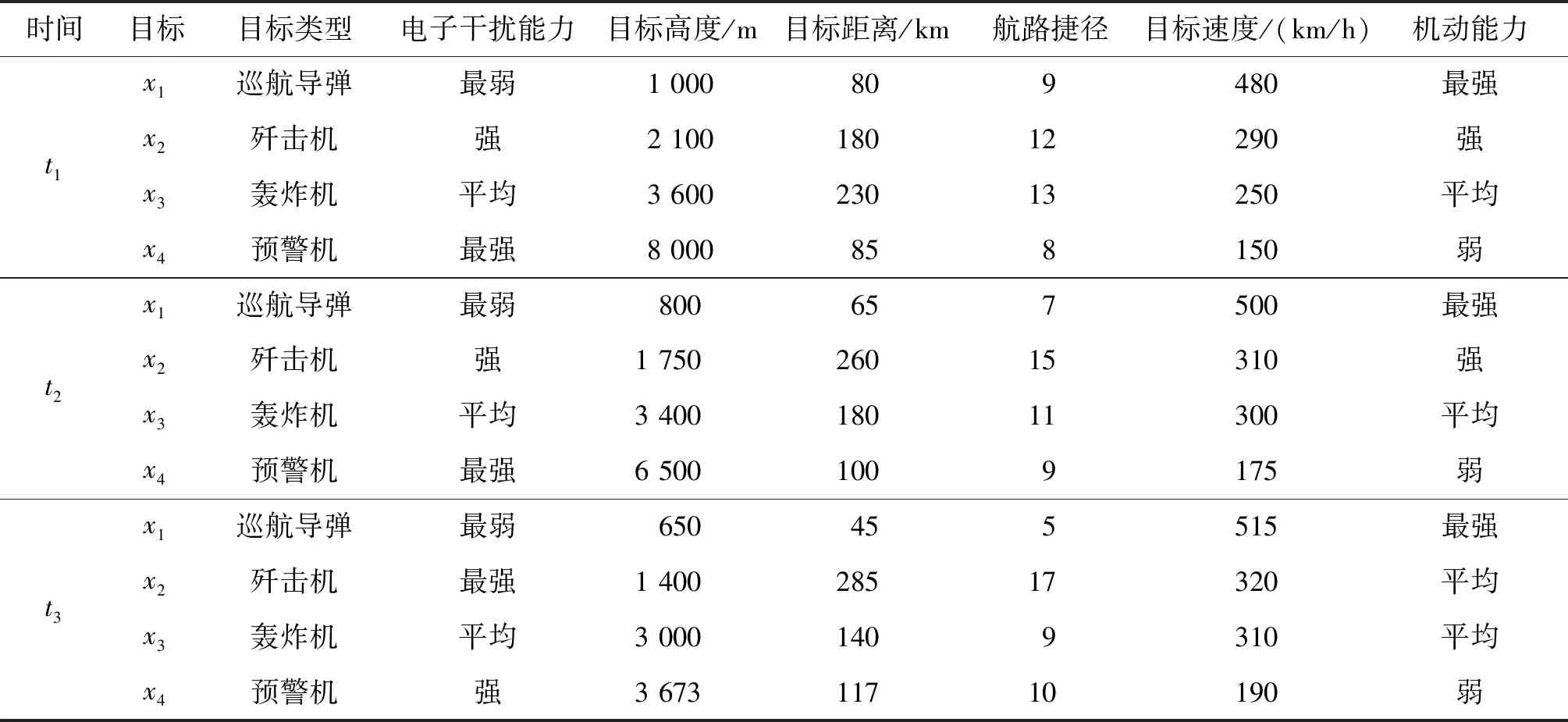
表1 各时刻评估指标的探测数据Tab.1 Probe data of each time evaluation indicator

表2 t1时刻的直觉模糊初始决策矩阵Tab.2 Intuitionistic fuzzy initial decision matrix at t1time

表3 t2时刻的直觉模糊初始决策矩阵Tab.3 Intuitionistic fuzzy initial decision matrix at t2time

表4 t3时刻的直觉模糊初始决策矩阵Tab.4 Intuitionistic fuzzy initial decision matrix at t3time
步骤1 本实验在没有权重约束的条件下,基于三个直觉模糊矩阵D1、D2、D3,获得的三组评估指标权重:
步骤2 基于直觉模糊矩阵和评价指标权重,初始决策信息聚合为直觉模糊矩阵Y:
步骤3 获得时间序列权重(φ=1.5):
ω1=0.200 0,ω2=0.266 7,ω3=0.533 3
步骤4 聚合最终的直觉模糊值:
(β1(x1),β2(x1))=(0.904 7 0.050 9)
(β1(x2),β2(x2))=(0.745 4 0.195 1)
(β1(x3),β2(x3))=(0.742 4 0.169 6)
(β1(x4),β2(x4))=(0.521 0 0.366 4)
步骤5 利用TOPSIS法对目标进行威胁等级排序:
S(X+,β1(x1),β2(x1))=0.908 8
S(X+,β1(x2),β2(x2))=0.759 7
S(X+,β1(x3),β2(x3))=0.763 2
S(X+,β1(x4),β2(x4))=0.569 5
目标威胁评估排序结果:x1>x3>x2>x4。
通过与文献[12]提出的加权聚合算子进行多时刻决策信息融合对比,利用TOPSIS法得到的目标威胁评估排序结果为x1>x2>x3>x4,如表5所示。
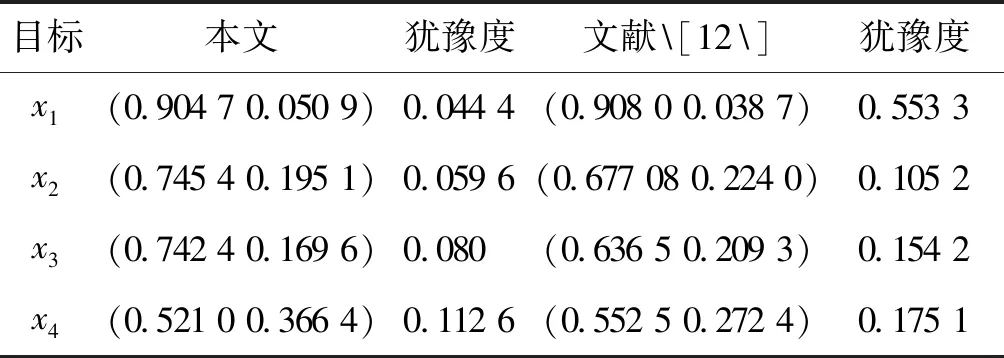
表5 对比试验Tab.5 Contrast experiment
从目标类型可以知道巡航导弹的威胁度最大、歼击机次之,预警机用于搜索、监视目标、干扰敌方,所以攻击威胁最弱。虽然歼击机的速度、干扰能力、机动能力都使战斗机的威胁度高于轰炸机,但从多个时刻的数据可以看出战斗机处于爬升状态,远离我方目标,轰炸机虽然攻击威胁低于战斗机,但轰炸机处于俯冲状态,接近我方目标,所以轰炸机的威胁度要高于歼击机的威胁度,分析结果与本文排序相同,证明本文提出方法的合理性。通过与文献[12]进行实验对比发现:两种方法的排序都认为巡航导弹的威胁最大、预警机威胁最小;通过对两种方法计算的目标犹豫度对比,可以看出证据合成在多时刻融合中考虑了犹豫度信息有效地降低了不确定性,证明了提出方法的有效性。
4 结论
本文提出了基于直觉模糊证据合成的目标动态威胁评估方法。该方法利用直觉模糊熵值最小化求解目标评估指标权重;通过权重修正证据源,避免信息丢失、保留犹豫直觉模糊信息;在考虑犹豫信息的基础上,采用逆泊松分布法对时间序列赋权,通过D-S合成规则的动态融合方法对多时刻评估信息进行有效融合,克服了静态威胁评估方法的不足。仿真结果表明,该算法在降低不确定性的同时满足动态可变的战场需求,可为防空作战决策提供一定的理论依据。
