辐射控制条件下直升机多机传感器协同探测方法
2020-11-05张宏斌鞠艳秋张少杰
张宏斌,鞠艳秋,齐 驰,张少杰
(陆军航空兵学院,北京 101123)
0 引言
机载雷达作为现代直升机主要探测传感器之一,可远距离的对目标精确定位、跟踪,从而实现先敌发现、先敌打击。然而,随着现代战场环境的日趋复杂,各种反雷达措施使得机载雷达的生存环境受到了严重的威胁和挑战。当雷达关闭后,直升机探测性能大幅下降。为此,许多学者针对辐射控制条件下雷达的控制和使用进行了卓有成效的研究。文献[1]基于协方差控制的思想,提出了一种自适应功率分级控制的目标跟踪算法,该算法可以根据目标距离的远近自适应地设计辐射的功率,进一步提高雷达的射频隐身性能。文献[2]建立了以雷达辐射峰值功率和驻留时间为控制参数,以检测概率和截获概率为目标的多目标优化模型,并设计了改进非支配排序遗传算法进行优化求解。上述方法虽然对机载雷达的射频隐身性能优化,但是未考虑多机传感器协同条件下的目标探测,具有一定的局限性。文献[3—5]提出了雷达-红外协同探测方法,该方法能够满足多机协同下,在雷达能够进行探测情况下多传感器协同使用;但需保证雷达工作在高精度探测模式,即如果该雷达进入敌方电子战探测范围,则只能通过控制雷达发射功率降低被截获概率,因此其效能将大大下降。文献[6—8]又提出了双机红外协同探测方法,该方法基本上实现了“无线电静默”,被截获概率会大大降低;但由于红外探测传感器本身特性,其使用有一定的限制条件,即当双机与目标相对位置满足一定要求时,才能实现对目标的准确跟踪定位。
以上辐射控制条件下多传感器协同探测方法各自具有其单一性和局限性,无法随战场态势变化实现既降低被截获概率又达到目标探测精度要求。针对此问题,本文提出了一种辐射控制条件下直升机多机传感器协同探测方法。
1 协同探测流程及方法
实际作战过程中,作战环境、作战任务、目标条件等时刻发生改变,当任何一个因素发生改变就有可能触发辐射控制。但不同条件触发的辐射控制类型不同,具有各自的特点,需要采取相应的方法以满足简单、高效地完成辐射控制条件下多机传感器协同探测。因此,需基于实际作战需求提出辐射控制条件下多机传感器协同探测流程。该流程根据战场态势,以探测精度和传感器位置作为约束条件,当触发不同约束条件后进入不同的协同探测模式。具体流程如图1所示。
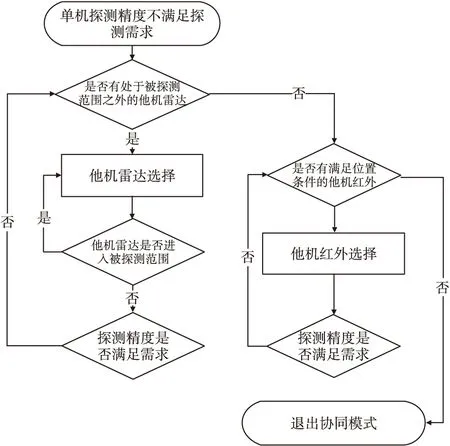
图1 辐射控制条件下多机传感器协同探测流程Fig.1 Helicopters sensors coordination detection process in the case of radiation control
由图1可见,在该流程中首先对他机传感器工作状态进行判定。由于是在辐射控制条件下,且在本机雷达关闭情况下,将他机雷达作为主要探测传感器。因此,首先对他机雷达是否处于被探测范围之外进行判定,若满足条件则进入他机雷达-本机红外协同探测模式,并对探测精度进行判定,精度不满足需求则重新进行他机雷达选取,直至无探测范围外的他机雷达。此时,进入双机红外协同探测模式。在该模式中,双机位置对探测精度影响较大,因此需对协同探测结果进行判断,若精度不满足要求则重新选择他机红外传感器。若无满足条件的他机红外传感器,则退出协同模式。
在他机雷达-本机红外协同探测模式下,若有多架他机满足协同要求,则需进行排序。主要依据为他机对目标可靠跟踪效果。文献[9]指出,雷达对目标跟踪效果可用滤波误差协方差描述:
(1)
双机红外协同探测过程中,一般以最优交会角精度理论衡量其协同探测效果,主要方法有三种,分别是基于圆概率误差的定位配置、基于定位模糊区的定位配置以及基于相对误差的定位配置。其中,圆概率误差定位主要适用于双机交叉定位,其前提条件是双机与目标成近似等腰三角形分布,双机与目标距离比:D1/D2在1~1.2附近,且交会角β绝对值处于90°~θ/2和90°之间[7]。当进行他机选择时,他机与本机和目标相对位置进行选择,其选择条件为三者尽量构成近似等腰三角形,交会角不大于90°。他机选择方法同样通过设置约束条件,使用遍历算法进行选择。
2 协同探测中传感器融合算法
本文中涉及到雷达-红外协同和双红外协同两种不同的传感器协同探测模式,因此有必要选择不同的融合算法解决传感器的信息融合问题。
2.1 雷达-红外协同探测信息融合
由于机载红外传感器提供目标的角度信息,而雷达提供目标的径向距离和角度信息。有了与雷达观测同步的红外传感器观测信息之后,便可以进一步将该信息与雷达的目标方位信息进行融合。
(2)
(3)
(4)
(5)
rIR(k)=rR(k)
(6)
(7)
2.2 双红外协同信息融合
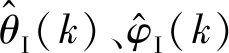
设有两个传感器S1和S2,它们同时跟踪同一目标,传感器与目标的相对位置如图2所示。
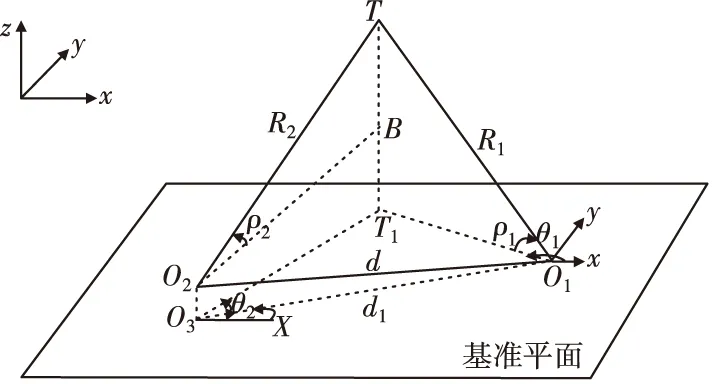
图2 目标的三角定位图Fig.2 Triangulation location diagram of targets
图2中,坐标系为笛卡儿坐标系,x、y、z轴的正方向分别为东、北、天方向。O1、O2分别为S1和S2所处位置,T为目标的位置。d、d1分别表示两传感器之间距离和水平距离,R1、R2为目标相对于两传感器的斜距,θ1、θ2和ρ1、ρ2分别表示两传感器的方位角和仰角。其中方位角的定义为:在水平面内,由x轴的正方向沿逆时针方向旋转到目标斜距在水平面内的投影线所形成的角度。设S2的海拔高度比S1高,以S1所在的水平面为基准平面,由O2向基准平面做投影O3,再由T向基准平面做投影T1,且O2B⊥TT1,θ为射线O3O1与x轴正方向的夹角。由于O1,O2在系统坐标中的坐标已知,所以d1和θ为已知。
夏日里,蒋海峰回老家,带水仙芝一起游双峰山,放飞心情,向山谷大声呼唤,向蓝天白云倾吐了爱意。他俩手牵着手,穿过茂密的竹林,并肩躺在青山之上。
在ΔT1O3O1中,∠T1O3O1=θ2-θ,∠O3O1T1=180°-θ1+θ,∠O1T1O3=θ1-θ2。
根据正弦定理有:
(8)
进而可得:
(9)
可见,T对于S1、S2的距离信息得到了补偿。
通过三角定位,T在分别以O1、O2为坐标原点的笛卡儿坐标系中的坐标为:
(10)
则容易求出T在系统坐标中的坐标值。


(11)
这样得到的定位结果可通过坐标旋转和坐标平移即可变换到系统坐标系中。最后通过融合两个位置数据,得到更为准确的目标定位信息。
3 仿真验证
3.1 仿真场景
多架直升机对同一目标执行探测任务,直升机和目标的视距与视角的几何位置关系图如图3所示。
图3 直升机与目标的位置关系图Fig.3 Position diagram of helicopters and targets
直升机群由直升机A、直升机B、直升机C组成。直升机A、B上的机载传感器为雷达、红外,直升机C上的机载传感器为红外。同时,设定对目标探测精度阈值为RMSE<200。
3.2 模型参数设置
机载传感器类型分别为雷达传感器、红外传感器、激光传感器。仿真中,雷达、红外和激光传感器的工作参数如表1所示,不同探测距离范围内的控制周期如表2所示。
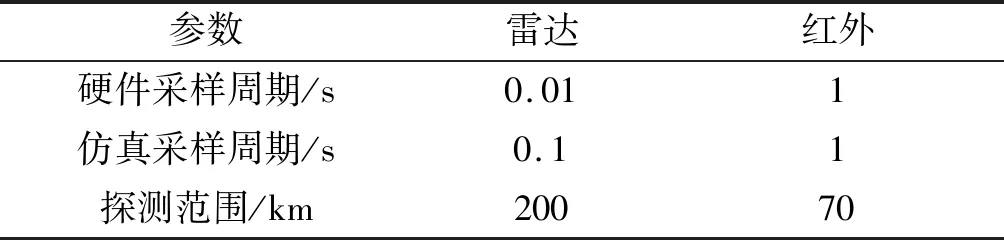
表1 雷达、红外传感器的工作参数表Tab.1 Working parameters of radar and infrared sensors

表2 雷达、红外传感器控制周期设置Tab.2 Control cycle setting of radar and infrared sensors
3.3 仿真结果
雷达-红外协同:直升机A使用机载雷达和红外传感器进行协同探测,协同探测前后的RMSE如图4所示。

图4 量测值上的RMSEFig.4 RMSE of detection value
由图4可见,未进行协同探测前,在x、y、z三个轴向上的RMSE(图中虚线所示)最大值均超过200(探测精度设定阈值),因此不能满足探测需求。通过雷达协同探测后,对目标的定位精度在三个轴向上均有不同提升,其中,x、y轴向上的RMSE最大值降至180,z轴向RMSE最大值降至140,各轴向探测精度均满足探测阈值要求。同时,由于雷达能够提供径向距离信息,因此在z轴上的探测精度提高更为明显。该结果与2.1节分析一致,说明在多机协同探测过程中,机载红外传感器只能测量目标的俯仰角、偏移角信息,因此存在信息缺失,此时利用异类传感器融合策略定位目标,通过多传感器信息融合,弥补了目标的量测缺失信息,较大地减少量测误差,实现了对目标的较精确定位。
双红外协同:直升机A进入雷达辐射控制阶段,此时由机载雷达和红外传感器切换完成对目标的跟踪,选定直升机C的机载传感器为红外传感器,此时多机融合前后的RMSE如图5所示。
由图5可见,探测过程中直升机A通过辐射控制策略使用本机雷达和机载红外传感器协同探测。控制策略为:根据期望误差协方差求出满足跟踪精度的雷达最小功率等级,且为确保该等级功率不会被敌方所探测到,求出敌方探测系统的功率截获概率,当截获概率超过直升机A所允许阈值,则立即关闭机载雷达,继续使用机载红外传感器。由于受雷达间歇关闭影响,x、y、z三个轴向上的RMSE(图中虚线所示)最大值均大于200,超过了所设定的探测精度阈值,即跟踪精度无法满足探测需求。

图5 量测值上的RMSEFig.5 RMSE of detection value
因此,转入双红外协同探测阶段,即直升机A使用机载红外传感器对目标进行探测时,由直升机C的红外传感器进行协同,协同过程中采用改进三角定位的方法对目标的位置进行精确定位。协同探测后目标定位精度如图5实线所示,x、y、z三个轴向上的探测精度均有提升,RMSE最大值均小于200,满足探测需求。该结果与2.2节分析一致。由此可见,通过双红外协同探测弥补了缺失信息,提高了对目标的跟踪能力。
分别对雷达-红外协同和双红外协同两种方法在各方向定位偏差RMSE进行统计,如表3所示。
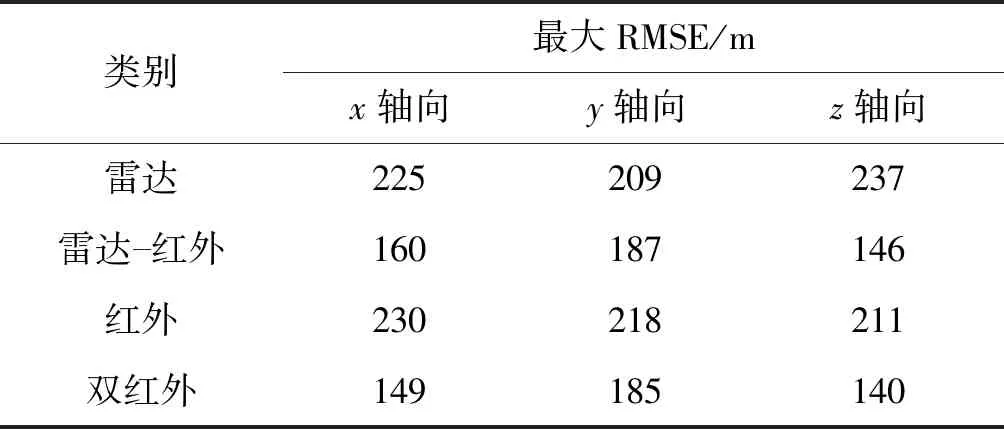
表3 两种方法定位精度对照表Tab.3 Position accuracy comparison of the two methods
由表3可见,采取不同的协同探测方法,其定位精度结果会有所偏差。异类传感器协同探测三个方向平均RMSE为164,同类传感器协同探测三个方向平均RMSE为158,可见同类传感器在信息融合过程中略占优势。但由于雷达和红外在探测信息上能够互补,因此雷达-红外协同过程中,z轴精度提升较大。在实际探测过程中,可根据战场环境及对目标探测需求进行相应选择。
4 结论
本文提出了辐射控制条件下直升机多机传感器协同探测方法。该方法以探测精度和被截获概率为约束条件,建立了直升机多机传感器协同探测流程。根据约束条件分别采用雷达-红外协同探测和双红外协同探测,并分别给出了雷达-红外信息融合算法和双红外信息融合算法。仿真验证表明,该方法在战场态势发生变化的情况下,根据约束条件选择相应的协同探测手段,既能降低被截获概率,又能满足目标探测精度要求。对于协同作战背景下,直升机多机传感器协同管理与控制具有一定的参考价值。但是,由于战场态势的复杂性和多变性,本文设置的约束条件尚存在一定不足,有待进一步研究。
