基于图像处理的导弹发动机点火时间测量
2020-11-05初善勇焦志刚吕慎川
初善勇,焦志刚,吕慎川
(沈阳理工大学装备工程学院, 沈阳 110159)
反坦克导弹由于操作灵活、破甲威力大、打击精度高等特点,成为各国单兵反坦克武器的主体,其推进装置由起飞发动机和增速发动机组成,发射时起飞发动机点火,将弹丸以较低速度推出发射筒,当弹丸飞行一定距离后,增速发动机点火使弹丸高速飞向目标[1]。在反坦克导弹的设计和测试过程中,增速发动机的点火时间是影响导弹制导和飞行姿态的重要参数,如何准确确定增速发动机点火时间,是反坦克导弹设计和测试的关键问题。
增速发动机的点火时间可以通过判断弹丸加速度转变进行确定,因此需要对弹丸的速度进行实时测量。目前弹丸测速的主要方法有金属网靶测速、锡箔靶测速、天幕靶测速、多普勒雷达、高速摄影等[2-3],金属网靶和锡箔靶测速法在测量时需要频繁更换靶纸,操作复杂、效率过低,已经很少采用。目前大多数测速方法为非接触测速,岳宇辰[4]、丁毅[5]等通过在炮口安装两个感应线圈,采集两个感应线圈的相位差来进行测速;李盼菲[6]、褚凌越[7]等讨论了天幕靶弹丸测速中的方法和适用性;刘华宁[8]、刘泽庆[9]、汤雪志[10]等利用高速摄影测量了弹丸的飞行速度。
上述方法对弹丸飞行速度的测量均为某一区间内平均速度,对于弹丸实时飞行速度的测量并未涉及,无法对导弹点火时间进行确定。高速摄影作为一种新兴的技术其具有便携、操作简单、数据可靠性高和可视性,被用于各行各业的多个方面。本文采用高速摄影测量与Matlab图像处理结合的方法,根据处理后的图像得出速度-时间曲线,从而确定出增速发动机点火时间。
1 试验方案
试验场地布置如图1所示,图中P为Phantom 高速摄影机、M为图像采集服务器、N为反坦克导弹发射架。由于试验在野外进行,因此还需准备发电机对高速摄影和图像采集服务器进行供电。为保证拍摄时的安全性,高速摄像机距离射击面的垂直距离应在20 m以上,且要保证拍摄范围覆盖导弹发动机两次点火间的飞行距离,为此采用焦距为70 mm的摄像机镜头进行拍摄。通过调节摄影机云台的方向和高度,使反坦克导弹发射架的炮口放位于视场的最左边面,保证弹丸在出炮口后,两次发动机点火均在视场范围内。
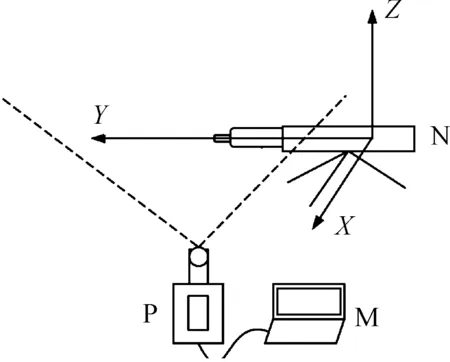
图1 试验场地布置示意图
根据当时现场条件调整高速摄影参数,参数设置为:光圈F=2.8;图像分辨率为1280×720;曝光时间t=10 μs;图像拍摄速率为每秒6 000帧,拍摄时长为触发后的4.5 s,由于拍摄时间短,为保证导弹发射和摄像机工作的同步性,采用对讲机时时通讯的手段进行全局协调,并保证发射过程的安全性。
2 图像处理
在采集图像的过程中,试验场地的场景、工作人员等多余信息会拍摄入素材之中,因此对图像进行识别特征点时误差会较大,无法准确识别出有用信息,因此在做数据处理前要将图像进行处理,分为预处理和二值化处理两部分。
2.1 预处理和二值化处理
图像素材预处理是去除图像素材中的多余信息,只保留反坦克导弹飞行弹道的部分,可以减少数据的运算量、提高精确性。
根据试验场地的情况,将图像进行裁剪,只保留炮口和导弹飞行轨迹部分,再将裁剪后的图像用双边滤波算法进行滤波降噪处理,提高图像的清晰度。预处理后的图像如图2所示,提高图片清晰度,并且裁去除弹丸外的其他外部信息。
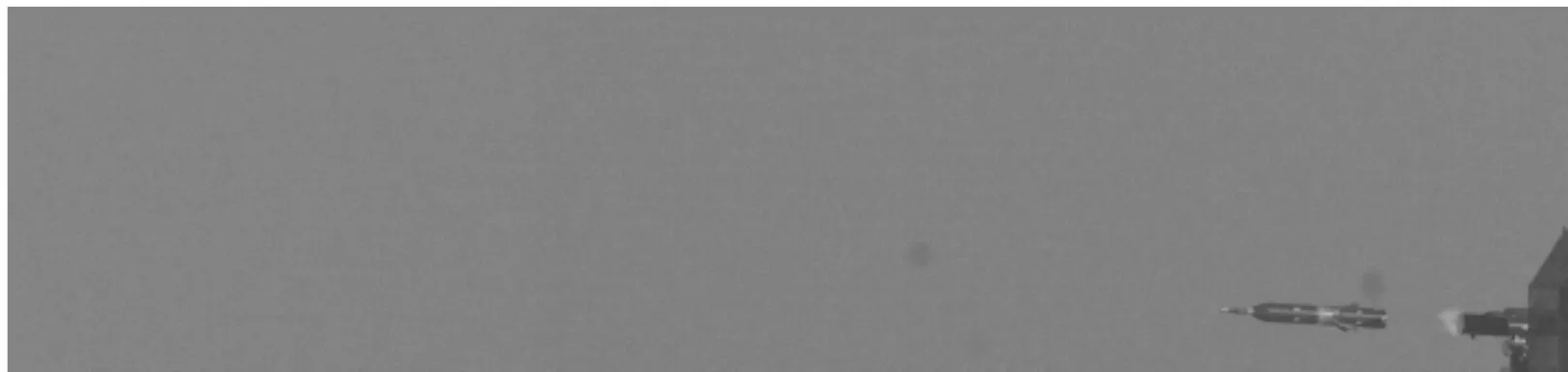
图2 预处理后图像
为了方便提取弹丸图像信息、突出弹丸轮廓、减少图像数据量,需要对图像进行二值化处理。二值化处理是根据阈值设置图像中的像素点的灰度值,将图像中特定物体设置为白色,其余背景设置为黑色[11]。对于最佳阈值的确定有多种方法,例如Huang阈值分割法、InterModes阈值分割法、Otsu最大类间方差法等,这些方法各有优缺点。对比几种方法,Otsu最大类间方差法具有计算简单、识别准确、不受亮度和对比度的影响等特点,能更好地突出特定目标的轮廓,满足本次计算要求。
利用Otsu最大类间方差法,根据图像的灰度特性,将图像分为前景和背景两个部分,当取最佳阈值时,两部分的类间方差应为最大值。通过Otsu最大类间方差计算阈值:
(1)
式中:mG为全局均值(整个图像的平均灰度);Pi(k)为第i个灰度集合发生的概率;m(k)为第i个集合中的平均灰度。
确定拍摄图像素材的全局平均灰度mG、每个集合的平均灰度m(k)和每个集合所发生的概率Pi(k),k在图像中所有可能的灰度级数[0,L-1]取值,将整个灰度级数分为两个集合,把各参数代入式(1)中,分别计算出每个k值所对应的类间方差,其中最大类间方差所对应的k值为最佳阈值。如果阈值不唯一,那么最佳的阈值为所有最佳阈值的平均值[12]。
通过Matlab中的工具箱graythresh函数计算出图像素材灰度的最佳阈值为86,根据最佳阈值将图像进行二值化处理,所有灰度大于或等于阈值的像素被判定为属于特定物体,其灰度值为255表示,否则这些像素点被排除在物体区域以外,灰度值为0,表示背景或者例外的物体区域,也将整个图像转换为黑白图像。在图像二值化处理中,Matlab二值化处理代码如下:
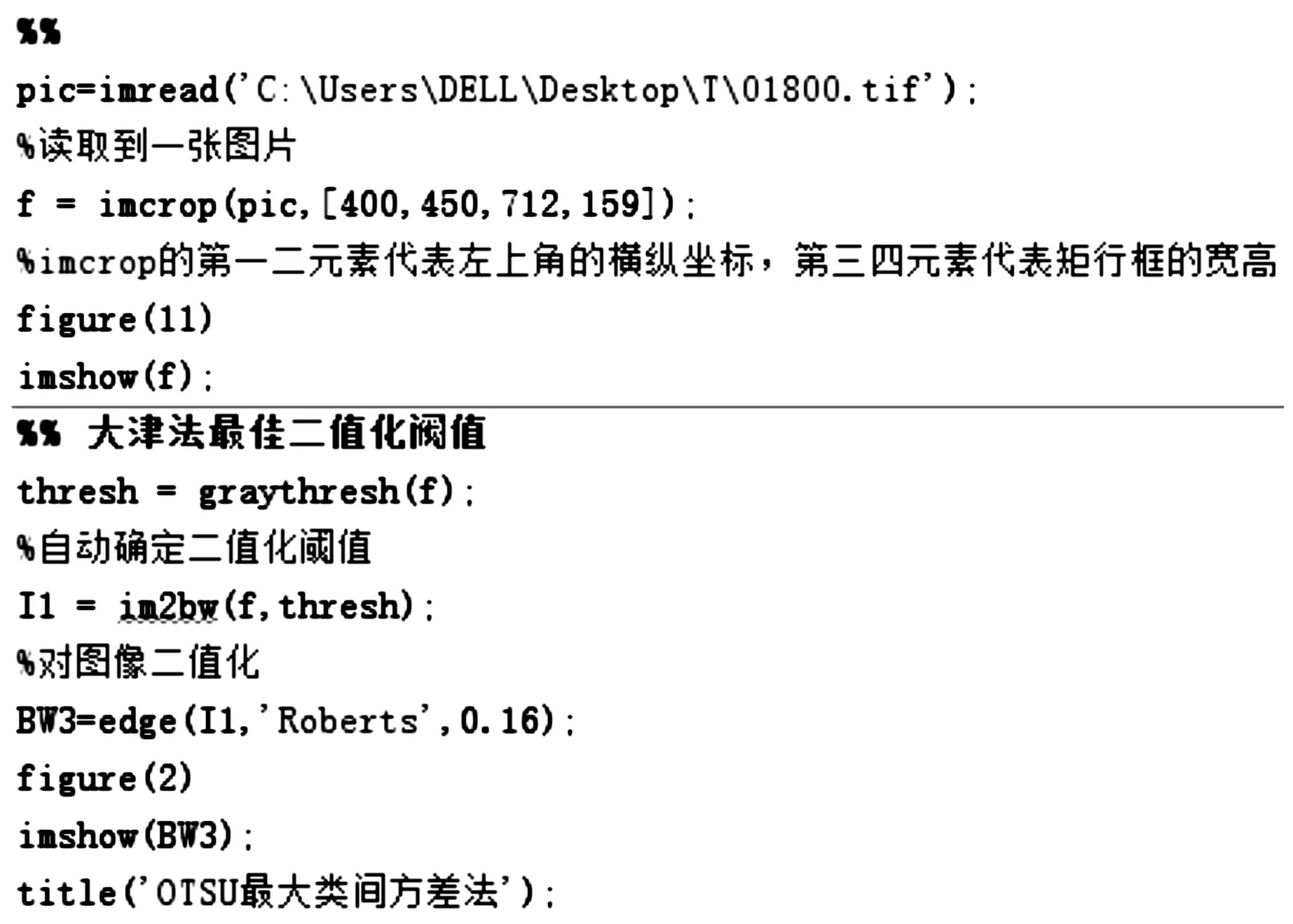
处理后的图像如图3所示。

图3 二值化图像
2.2 特征点的选取
在数据处理时,需要通过两点的像素点坐标,计算出每副图片中特征点到固定点的距离。选择导弹的长杆头部顶点为特征点,炮口位置为固定点,在发射时炮口保持静止不动,根据图像选取(662,139)坐标作为固定点。弹丸飞行过程中,导弹的长杆头部顶点为运动的像素点,在图像中利用for循环语句全局从左至右,从上至下搜索第一个灰度值为255的像素点,确定特征点像素点的位置坐标为(i1,j1),拍摄素材仅为飞行轨迹的小部分,假定导弹在同一平面内飞行,忽略其垂直于该平面的横向位移,仅将像素点通过缩放转化矩阵,将像素点坐标转换为实际地面坐标。转换矩阵如下所示:
D1=D·Ms=
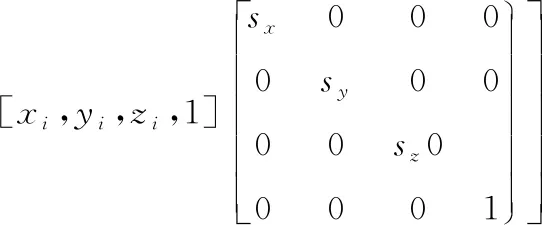
(2)
式中:xi、yi、zi为第i点像素点坐标;Sx、Sy、Sz为坐标x、y、z方向的缩放系数。
将每张素材按照上述过程进行处理,得出弹丸飞行时的实时速度曲线,流程如图4所示。
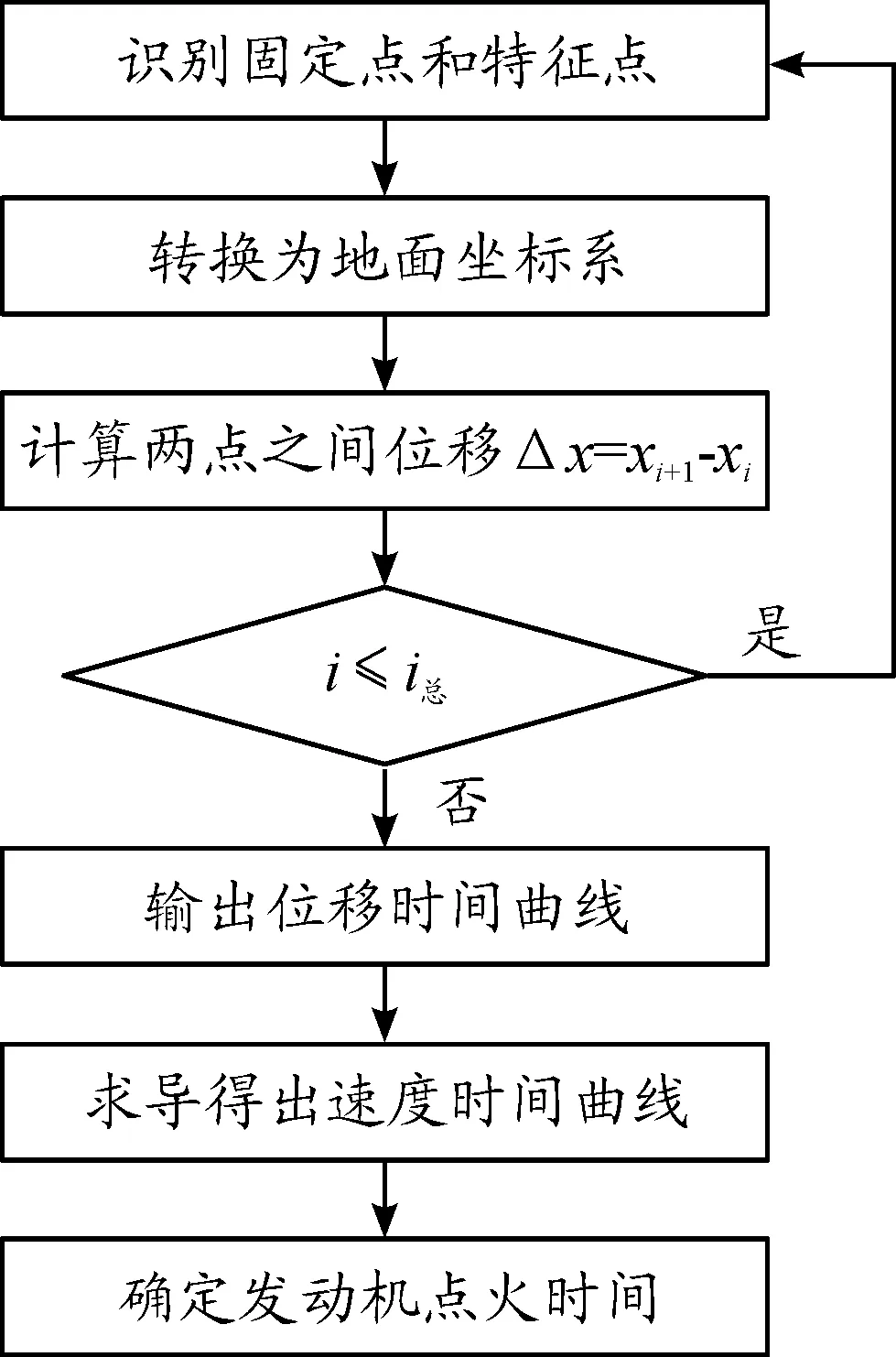
图4 图像处理流程框图
3 数据处理
根据图4将所有图像素材进行处理,输出弹丸飞行时位移曲线如图5。
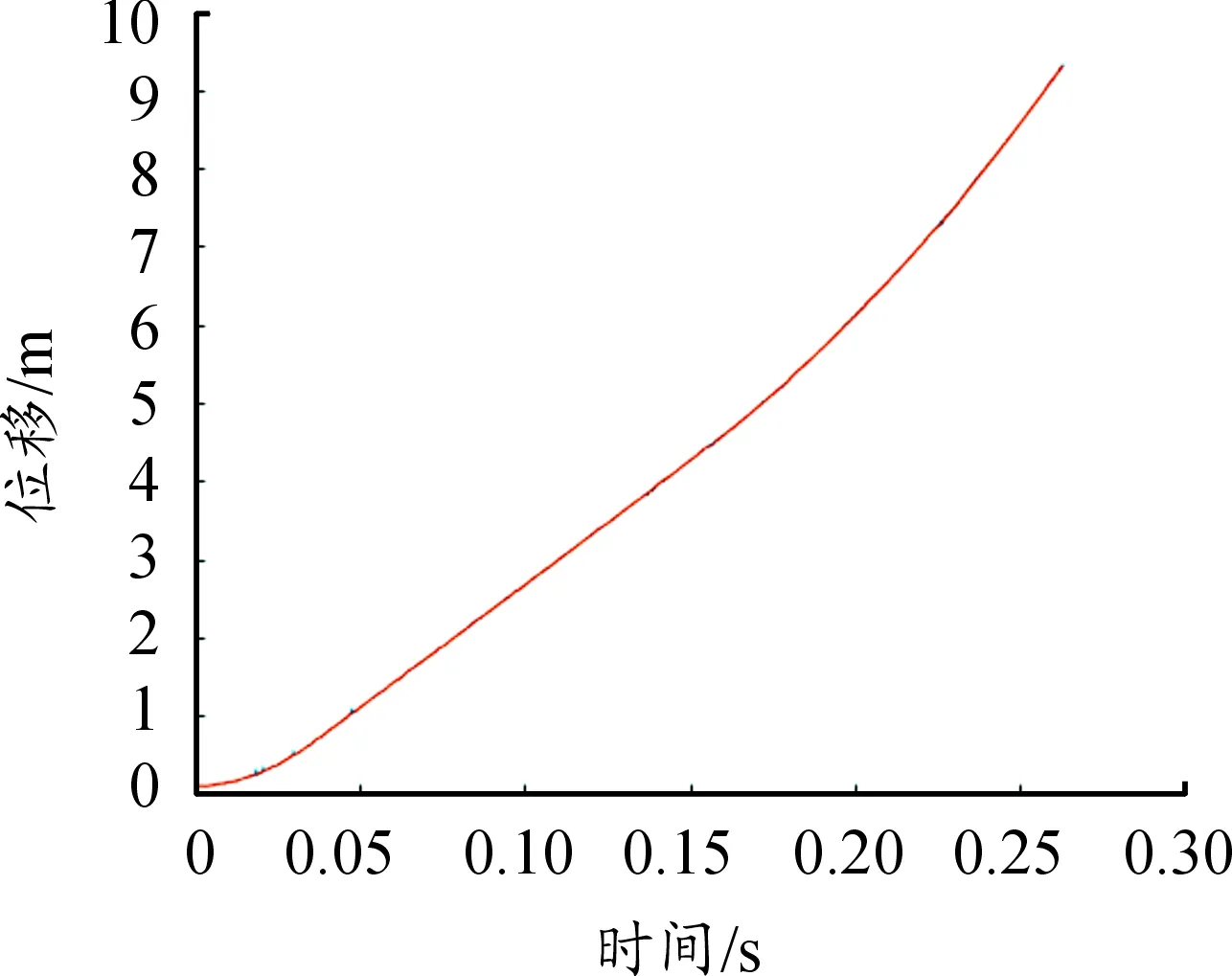
图5 弹丸位移曲线
由图5中可以看出位移的斜率随着时间变化的不明显,不能准确判断点火时间点,为了更精确地识别增速发动机点火时间,需要通过速度的拐点来判断导弹发动机点火时间。
导弹增速发动机点火时,加速度会迅速增大,速度曲线的斜率发生改变,根据速度拐点能更精确确定增速发动机的点火时间,根据式(3)求出每两幅图像之间的平均速度。
(3)
式中:f(ti+1)为第i+1张素材弹丸运动的位移;f(ti)为第i张素材弹丸运动的位移;ti+1为第i+1张素材对应的时刻;ti为第i张素材对应的时刻。
得出速度曲线如图6所示。
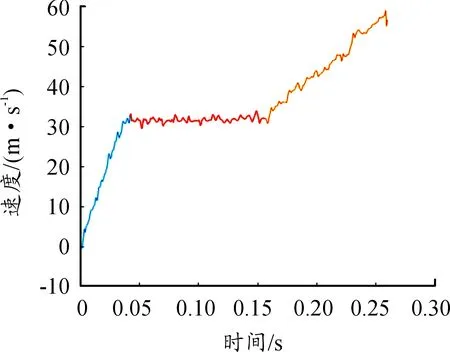
图6 速度曲线
由图6可以看出图像噪声太大无法准确判断导弹发动机点火时刻点,因此将图像进行拟合处理,弹丸在运动时经历了3个阶段,如果只采用一种多项式函数进行拟合,难以取得较为精确的拟合精度和效果,因此对速度图像分为三段分别进行拟合。拟合后的三段方程为:
y1=-2.3×105x3+8.2×103x2+8.3×102x-0.1
y2=6.9x+31.94
y3=6.8×103x3-4.2×103x2+1.1×103x-59.77
由三段方程绘制速度拟合曲线,如图7所示。由图7可以看出,速度第二次突变点的时间为0.156 3 s,即为导弹增速发动机的点火时间。

图7 速度拟合曲线
4 结果分析
多普勒测速雷达利用多普勒原理对运动物体进行连续测速。如图8所示,其原理是根据电磁波的传递进行连续测速,通过雷达发射电磁波使运动中的弹丸发生电磁感应,在高速旋转的弹体上产生电动势,从而产生感应电流,形成新的电磁波场。雷达会接收弹体电磁场产生的电磁波。在这个过程中,若弹丸与原高频电磁波的源有相对运动,反射回的电磁波的频率就会发生变化。这种由于相对运动引起的频率变化,称为“多普勒效应”[13]。
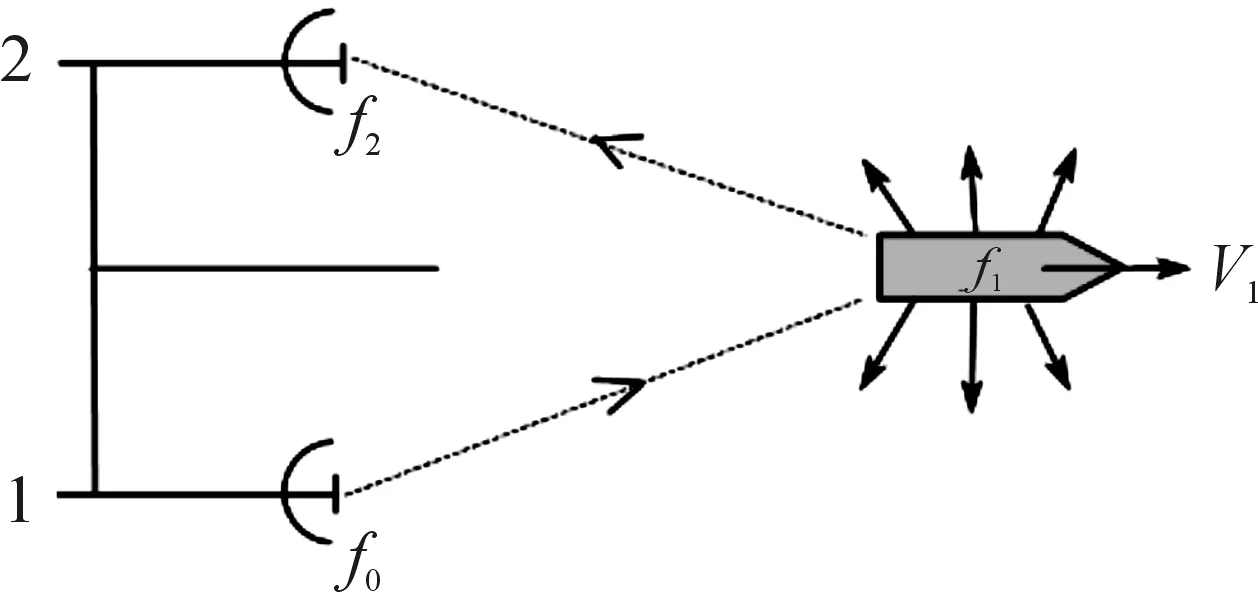
图8 多普勒雷达原理示意图
根据多普勒雷达测速原理测速公式可得:
(4)
式中:V1为弹丸的速度;f0为发射天线发射出的频率;f2为接受天线接收到的频率;λ0为电磁波的波长。
根据上述公式就能通过多普勒雷达采集到的电磁波频率得出弹丸速度。
分别采用上述两种方法进行测速试验,共发射3枚反坦克导弹,两种方式得出的试验结果如表1、表2所示。
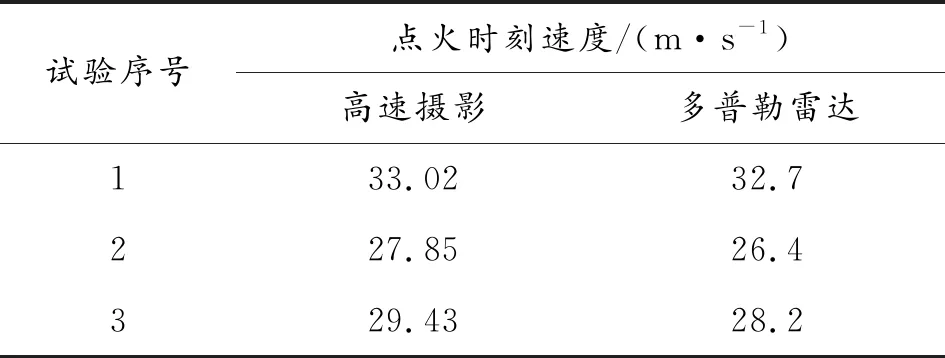
表1 点火时刻速度试验
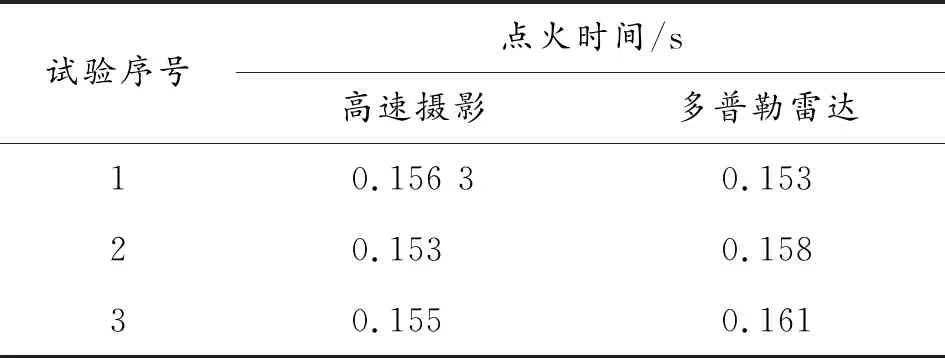
表2 点火时间试验
由表中可以看出,通过高速摄影与Matlab结合的方法测出的增速发动机点火时间和弹丸速度,与多普勒雷达得出的结果基本吻合,且精度与多普勒雷达相当。
多普勒雷达价格昂贵、操作复杂、不具有便携性,相比较而言高速摄影测速方法操作简单、具有便携性和可视性,在弹丸飞行时不仅可以测量弹丸速度还可以对弹丸的姿态进行监控,为研发和试验提供有价值的参考依据。
5 结论
提出一种高速摄影与Matlab图像处理结合的某型号反坦克导弹发动机点火时间测量方法,利用高速摄影机拍摄出反坦克导弹飞行时的图像素材,在Matlab中对图像进行预处理和二值化处理,选取图像中特征点坐标和固定点坐标,计算出弹丸运动时的位移和速度,得出速度-时间曲线,通过曲线中弹丸速度的转变点,确定增速发动机点火时间。
将得出结果与多普勒雷达测速数据进行对比,验证此方法的可行性和精确性,同时此种方法可以降低成本,并能得到导弹飞行姿态,为研究人员对反坦克导弹设计和测试提供参考依据。
