一种基于SOC的风挡雨刷控制系统设计
2020-11-04王瑜嘉惠晓强
秦 冲,王瑜嘉,惠晓强
(航空工业西安航空计算技术研究所,陕西 西安 710065)
0 引言
航空风挡雨刷系统是飞机的重要控制系统之一,在传统的航空风挡雨刷控制系统设计中,多采用分立元器件、延迟继电器及机械开关实现风挡雨刷系统控制功能,使用该方法设计时,机上线路铺设麻烦,且延迟继电器尺寸大,寿命短,使得风挡雨刷系统后期维修更换成本高。本文针对传统风挡雨刷的缺点,提出了一种基于SOC片上系统的风挡雨刷控制系统设计方法,该设计方法具有集成度高、寿命长、线路铺设简单等优点。
1 风挡雨刷系统设计
基于SOC片上系统的航空风挡雨刷系统由左控制盒、右控制盒、系统控制模块、雨刷电机、冲洗泵组成,其中,控制模块单元采用嵌入ARM处理器内核的SOC片上系统芯片作为主控制单元,实现采集信息的解算及输出控制功能。系统设置主控制盒和副控制盒,分别位于飞机驾驶舱内主驾驶位和副驾驶位,用于共同控制风挡雨刷系统的雨刷电机和冲洗泵工作。系统控制驱动模块同时采集主/副控制盒的控制状态信息,并对采集的状态信息进行有效性判断。当主/副控制盒状态信息不一致时,则以主控制盒的状态信息进行风挡雨刷系统控制工作。根据控制需求,该系统可实现雨天的雨刷电机高速、低速运行的雨刮控制工作,也可以实现非雨天时的冲洗泵与雨刷电机协同工作完成风挡玻璃冲洗工作。风挡雨刷系统的结构框图如图1所示。
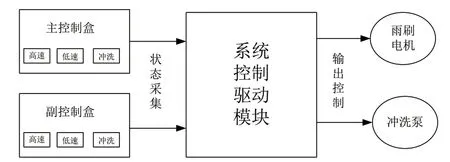
图1 风挡雨刷系统结构框图
2 硬件设计
根据风挡雨刷系统总体设计,系统控制驱动模块包括SOC处理器最小系统单元、状态采集控制单元、雨刷电机驱动单元、冲洗泵驱动单元和供电单元组成,其结构框图如图2所示。
2.1 SOC处理器最小系统单元
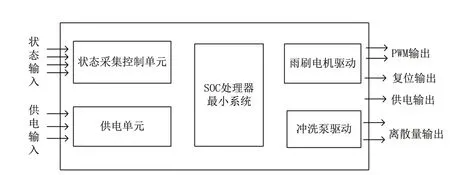
图2 系统控制驱动模块框图
SOC处理器最小系统单元是风挡雨刷控制系统的核心单元,主要完成风挡雨刷系统的状态信息数据采集、控制解算及输出驱动控制功能。该处理器最小系统单元以集成ARM处理器内核的SOC片上系统芯片为核心芯片,外围电路配置如下:一是配置数据存储器电路:设计采用2片16位128MB存储容量的DDR3 SDRAM作为数据存储器,实现32位存储器访问操作,SOC芯片自带有1.5V的32位DDR接口,可与2片DDR3芯片直接相连;二是配置程序存储器电路:设计采用1片128Mbit的FLASH芯片作为程序存储器,该程序存储器芯片具有QSPI总线接口,与SOC芯片自带的QSPI接口直接相连,实现应用程序的存储和访问;三是配置处理器供电电路:设计采用2片Linear公司的DC/DC芯片,实现内部5V电压到1.0V、1.5V、1.8V、3.3V电压的二次电源转换功能,为处理器最小系统单元提供电源供电;四是配置调试接口电路:采用标准RS232串行接口芯片,配备DB9串行接口母头,实现处理器调试接口电路;五是配置DDR3供电调理电路:采用DDR专用的终端调理电压芯片,实现1.5V到0.75V参考电压的转换功能,为DDR3提供参考调理电压,保证DDR3芯片的正常运行。
2.2 状态采集检测单元
状态采集检测单元用于采集主、副控制盒的高速、低速、冲洗按钮的状态信息,并将采集到的状态信息传输给SOC处理器最小系统单元进行解算。状态采集检测单元电路设计中,在状态采集输入端采用RC滤波电路对采集信号进行滤波防抖处理,以防止因控制盒抖动及其他干扰带来的误操作;通过RC滤波电路后的状态信息,采用自带三级雷电防护的离散量采集芯片,实现离散量信号到数字信号的转换过程,并将采集结果存储在该芯片内部寄存器中;SOC处理器最小系统单元通过SPI总线接口,周期性对离散量采集芯片进行访问控制,读取内部寄存器中的状态数据信息。
2.3 电机驱动单元
电机驱动单元接收SOC处理器最小系统的输出命令,驱动控制雨刷电机的工作状态。电机驱动单元电路设计中,采用光电耦合器芯片进行隔离设计,实现低电压控制信号到高电压控制信号的电隔离,保护驱动控制单元;采用高端驱动器芯片实现功率型输出,通过控制高端驱动器的导通状态,输出28V PWM脉宽调制波形,从而控制雨刷电机的高速、低速工作状态。同时该电路提供一路复位控制输出,用于控制雨刷电机的复位功能。
2.4 冲洗泵驱动单元
冲洗泵驱动单元接收SOC处理器最小系统的输出命令,驱动控制冲洗泵的工作状态。冲洗泵驱动单元电路设计中,同样采用光电耦合器进行隔离设计,通过控制高端驱动器的功率输出给冲洗泵供电,从而控制冲洗泵的工作,实现冲洗出水功能。
2.5 供电单元
供电单元用于完成机上输入电压到内部二次电源电压的隔离转换功能,同时向雨刷电机提供工作电压供电。供电单元具备输入电压的过压和浪涌保护功能,同时具备对二次电源输出的过流保护功能。
3 软件设计
风挡雨刷系统可以具有两种工作模式,一种是下雨天的雨刮器持续工作模式,一种是非下雨天的冲洗工作模式。其系统控制流程图如图3所示。

图3 系统控制流程图
系统上电后,首先完成对控制模块内各个单元的初始化操作过程,输出状态处于默认安全状态,然后系统进入正常工作状态。状态采集检测单元周期性采集主/副控制盒开关按钮状态信息,SOC处理器最小系统周期性读取采集的状态信息,判断其状态是否有效,并进入相应的工作状态,具体工作控制过程如下:
冲洗工作过程:当冲洗状态有效时,则系统首先控制冲洗泵驱动单元输出有效,控制冲洗泵工作出水10s时间;然后控制雨刷电机驱动输出有效,控制雨刷电机工作30s时间;最后输出复位信号有效,控制雨刷电机进行复位操作,从而完成风挡雨刷系统的冲洗工作过程。
雨刮工作过程:当雨刷高速/低速状态有效时,则系统控制雨刷电机驱动PWM脉宽调制(高速和低速通过PWM输出脉宽的不同占空比进行区分处理)输出持续有效,直到系统检测到高速/低速状态无效时,控制关闭雨刷电机驱动输出,同时输出复位信号有效,控制雨刷电机进行复位操作,从而完成风挡雨刷系统的雨刮工作过程。
4 结束语
通过在试验室进行风挡雨刷控制系统实物联试验证,该基于SOC片上系统的风挡雨刷控制系统工作正常,控制功能有效,可以实现飞机风挡雨刷控制功能。本文提出一种基于SOC片上系统的风挡雨刷控制系统,采用集成处理器和逻辑运行功能,通过PWM脉宽调制技术实现雨刷电机的高、低速调节控制。系统通过集成控制设计,简化了机上布线复杂度,提高了雨刷电机控制精度,可以满足航空领域中的使用要求。
