船用低压直流设备的稳压研究
2020-11-03张存喜程攀龙苏玉香
郑 堃,张存喜,程攀龙,王 瑞,苏玉香
(1.浙江海洋大学 海洋工程装备学院,舟山316022;2.浙江海洋大学 船舶与海运学院,舟山316022)
随着交流电网技术应用与发展,在船舶电力系统中,电机的谐波干扰、接入电网的发电机必须同步、无功功率损耗等固有矛盾越来越显现[1]。 以前直流电网在电源的变换方面存在困难而且直流电动机的整流子结构较为复杂,因此应用相对交流电网较少。 随着大功率电子技术以及整流技术的不断发展,又由于直流电网的电源并联操作和运行,系统灵活性较高,输电稳定性优于交流,使得直流电网在船舶上的应用成为未来船舶电力系统发展的一个重要趋势,为将来使用新型电源和新型大功率推进器做准备[2]。
针对通信导航设备、自动化仪器、探鱼仪等低压直流设备,在大部分新型船舶的电网中,它们的供电方式已经从传统的蓄电池供电转变为由直流发电机或太阳能经开关电源供电。 一般直流电网中提供的输入电压相对这些设备的额定电压较大,所以降压模块必不可少,但经过Buck 降压电路后的输出电压质量往往有好有差,不够稳定。 本文在传统PID 控制的前提下,采用了模糊控制与之结合的方法。 在Matlab 中进行建模仿真,研究结果发现两者相结合相对于传统PID 控制结果更佳,电路输出电压更稳定,动态性能以及抗干扰性更好。
1 Buck 电路
Buck 电路又称降压斩波电路,原理如图1所示。在t=0 时,MOSFET 管导通,电源对R 供电,Uo=E,当t=t1时MOSFET 管关断,L 向R 续流供电,至一个周期T 结束。 再驱动VT 导通,重复上一个周期的过程,其中电容C 用来平稳电压[3]。 负载电压的平均值为

式中:ton为导通时间;toff为关断时间;T 为开关周期;α 为占空比。

图1 Buck 电路原理图Fig.1 Schematic diagram of Buck circuit
一般船用探鱼仪等低压直流设备的额定电压为12 V,本文仿真的电路设计为直流电网输入电压24 V,经过降压电路后输出电压为12 V 来供给设备[4],其中电感L 为4.7×10-4H,电容C 为2×10-4F,电阻R 为1.8 Ω。
2 PID 控制器设计
在目前控制工业中,传统PID 应用较多。 它的控制是利用反馈来调节,根据设定的期望值与传感器收集到的输出值构成偏差。 然后将偏差作为输入用于计算中,并将比例、积分、微分对偏差作用的结果线性叠加形成控制量,从而来调节控制过程[5]。 控制原理如图2所示。

图2 传统PID 控制原理图Fig.2 Schematic diagram of traditional PID control
控制器的输出和输入之间的关系可描述为

增量型PID 控制算法为

式中:KP为比例增益;KI为积分增益;KD为微分增益;Ti为积分时间;Td为微分时间;T 为采样时间。
3 模糊PID 控制器设计
3.1 模糊PID 控制器结构
模糊控制器是以误差和误差变化率为输入变量,输出变量为ΔKp、ΔKi、ΔKd。 其原理是把输入PID调节器的误差和误差变化率输入到模糊控制器,然后根据模糊规则调节Kp、Ki、Kd,经过模糊化、近似推理和清晰化后,把得出的修正量ΔKp、ΔKi、ΔKd输入到PID 调节器,对三个系数实时修正[6]。 控制原理如图3所示。
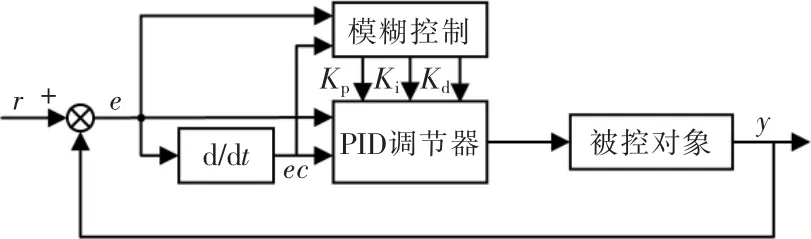
图3 模糊PID 控制原理图Fig.3 Fuzzy PID control principle diagram
最后整定出的PID 参数分别为
式中:kp、ki、kd是PID 参数的初值;ΔKp、ΔKi、ΔKd是经过模糊控制调整参数变化量。
3.2 模糊规则设计
模糊控制的核心是模糊规则,掌握好误差、误差变化率、PID 各参数三者之间的关系是很重要的。设置模糊规则的一般步骤: 首先将e、ec 和ΔKp、ΔKi、ΔKd的大小用模糊语言描述,只根据变化的程度范围描述,本文把它们的大小描述为{负大,负中,负小,零,正小,正中,正大}。 然后设置论域,确定隶属度函数[6]。 本文将e、ec、ΔKp、ΔKi、ΔKd的论域设置在[-1 1]之间。 隶属函数度函数的选取需要根据其覆盖程度、稳定度和灵敏度来确定,本文采用的隶属度函数为trimf(三角)型。其曲线如图4所示。

图4 隶属度函数曲线图Fig.4 Curve of membership function
最后结合上述步骤以及e、ec、ΔKp、ΔKi、ΔKd之间的模糊关系,列出模糊规则,模糊推理选用Mamdani 型,解模糊方法选用默认的重心法[6]。 规则如表1所示。 Mamdani 型模糊控制器如图5。
4 仿真与结果分析
4.1 正常运行对比
本文所有的模型搭建及仿真均在Matlab/Simulink中进行,Simulink 是Matlab 里能够独立运行的一个模块,它供给了可DIY 的模块库和交互的环境。 针对控制系统,在Simulink 中能够完成设计系统、仿真测试和连续测试。 在Simulink 环境下,人们不仅能够解决混合性质的系统,还可以解决非线性系和多任务系统。 两者控制的仿真模型分别如图6、图7所示。
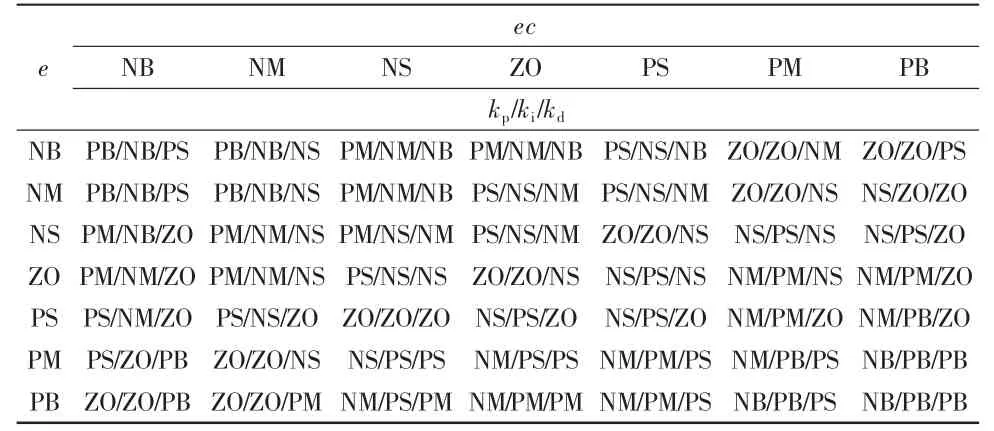
表1 模糊规则表Tab.1 Table of fuzzy rules

图5 Mamdani 型模糊控制器图Fig.5 Mamdani type fuzzy controller diagram

图6 传统PID 控制仿真图Fig.6 Simulation diagram of traditional PID control
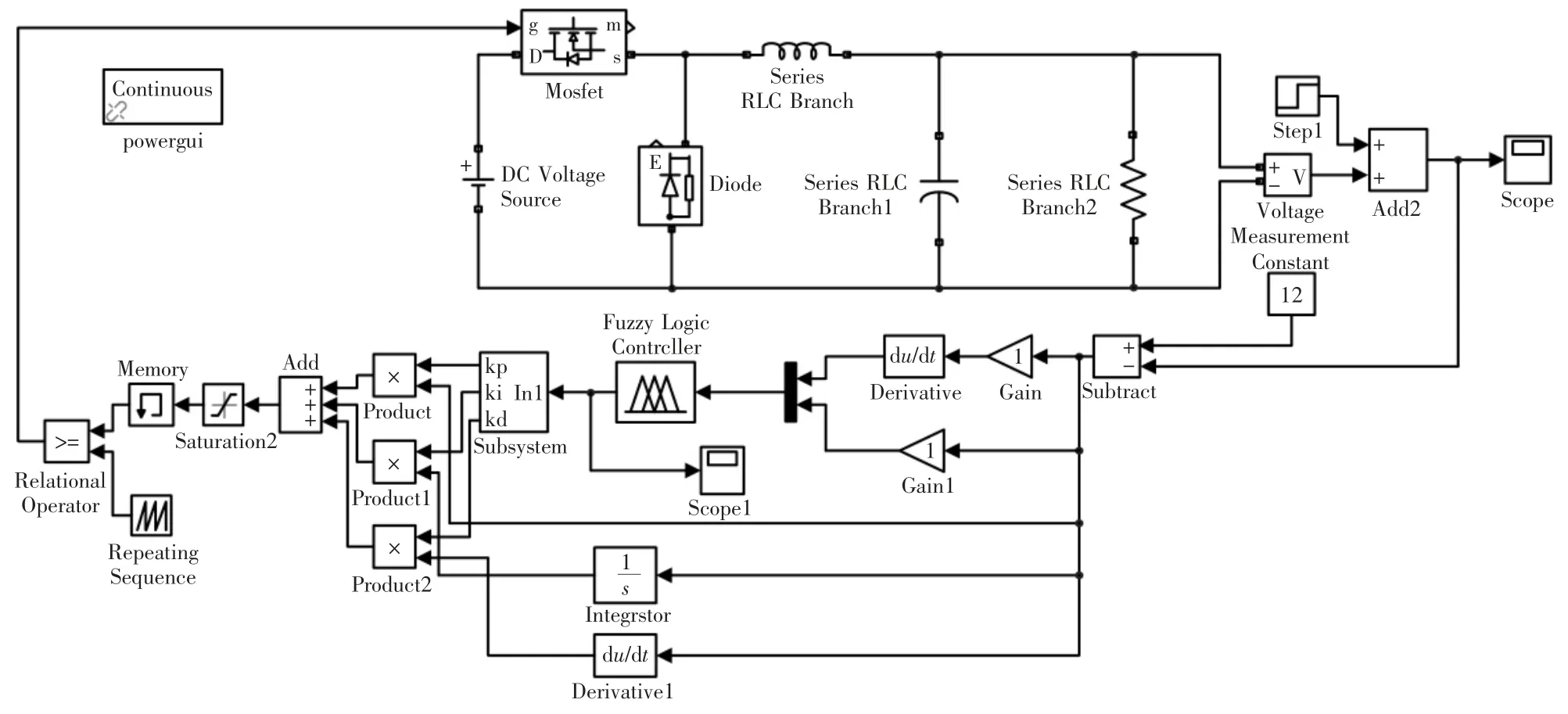
图7 模糊PID 控制仿真图Fig.7 Fuzzy PID control simulation diagram
根据4∶1 衰减曲线法得到KP、KI、KD的初值分别为9、5、0.003[7],设定仿真时间为0.005 s,在正常运行情况下,两者仿真的输出波形对比如图8所示。
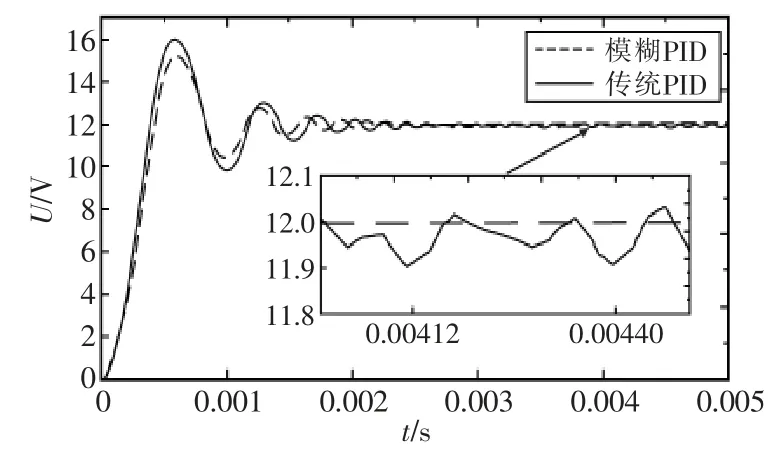
图8 正常运行对比图Fig.8 Comparison of normal operation
经过测量,得出两者的数据对比,如表2所示。

表2 正常运行数据对比表Tab.2 Normal operation data comparison
根据上述图8、表2可知,当系统在正常运行情况下,模糊PID 控制的系统超调量较小,调整时间更短,能更快达到稳定状态。 而且观察系统稳定后的局部放大图可知,由模糊PID 控制的系统电压更加稳定,传统PID 控制的则存在一些波动。 所以在此情况下模糊PID 控制效果更优。
4.2 加入干扰运行对比
为了进一步比较两者的动态性能以及抗干扰性,本文先是在降压电路的电压达到稳定后,于0.004 s 在电路输出端加入大小为2 V 的干扰,来模拟实际工作中遇到的负载扰动,得到加入干扰后两者仿真的输出波形对比,如图9所示。

图9 负载扰动下波形对比图Fig.9 Comparison of waveforms under load disturbance
经过测量,得出两者干扰后的数据对比,如表3所示。
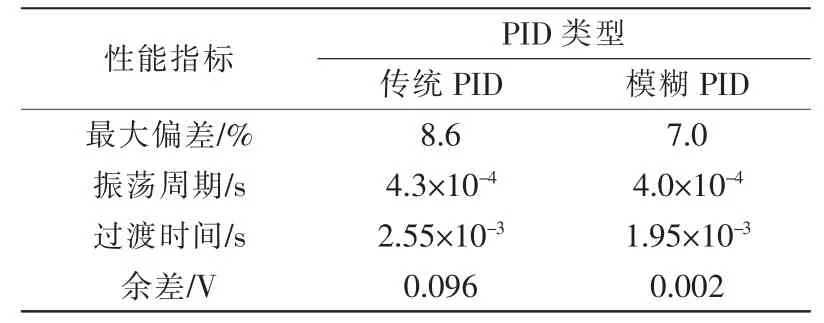
表3 加入干扰后数据对比表Tab.3 Data comparison table after adding interference
根据上述图9、表3可知,在模拟负载扰动的工况下,模糊PID 控制的系统最大偏差较小且过渡时间较短,在受到扰动后能更快地使系统达到稳定状态,且稳定后的电压相比于传统PID 控制的系统其余差更小,电压更加稳定。所以在此情况下模糊PID具有更好的控制效果。
4.3 输入电压波动运行对比
由于在实际船上的运行中,电网输入过来的直流电压一般都是不稳定且存在着一定的波动。 本文模拟了在实际工作中输入电压不稳定的工况下,来进一步对比两者的控制效果。 通过如图10整流电路来生成一个波动的电压,电压波形如图11所示。

图10 整流电路图Fig.10 Rectifier circuit diagram
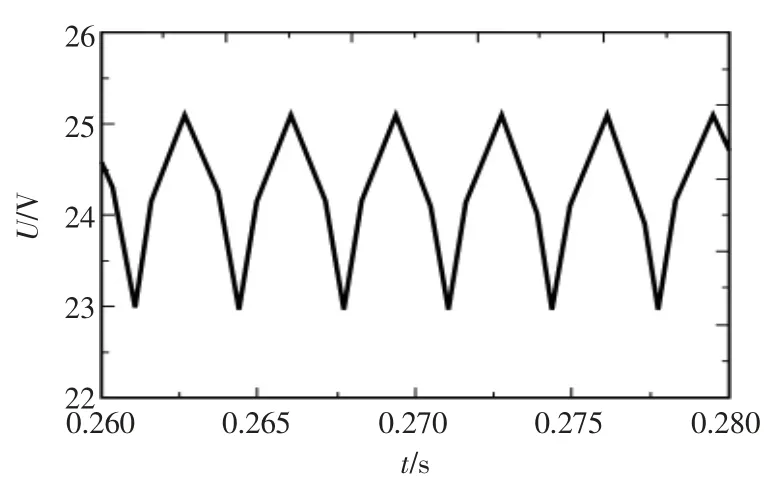
图11 电压波形图Fig.11 Voltage waveform diagram
然后得到在此工况下,对比两者的输出波形,如图12所示。

图12 输入电压波动下波形对比图Fig.12 Comparison of waveforms under input voltage fluctuations
并经过测量,得出两者干扰后的数据对比,如表4所示。

表4 输入直流电压波动下数据对比表Tab.4 Data comparison table under input DC voltage fluctuation
根据上述图12、表4可知,在输入电压波动不稳定的工况下,模糊PID 控制效果更佳。 系统稳定后,由传统PID 控制的系统抗干扰能力较差,电压波动较大,而模糊PID 控制的系统在这两个方面则表现的更加优越,有很大的改善。
5 结语
综合上述结果分析,不难发现在各个工况下由模糊PID 控制的降压电路,其控制效果更好,响应速度更快,动态性能较好。 而且在各种模拟工况和干扰下,前者的抗干扰性更好,输出的电压更稳定,有利于船用低压设备更安全更稳定的工作。
随着人工智能的不断发展,其理论方面不断成熟完善,但在与实际系统的应用结合中,还是存在着一定的空缺,特别是本文研究的船舶方面。 所以未来将人工智能更好地应用于船舶上的其他系统,仍需要不断的研究和探索。