基于TDM信号的反无人机MIMO雷达系统
2020-11-03鲁振兴
陈 尧,尹 伟,鲁振兴
(中国电子科技集团公司 第54研究所,石家庄 050081)
0 引言
随着无人机的广泛应用,特别是无人机蜂群技术的逐步成熟,无人机对重点区域、重点目标的威胁日益增加[1-2]。由于探测距离远、具备三坐标探测能力,便于引导光电设备,三坐标雷达成为反无人机系统的重要组成部分。然而,需要的通道数目较多、通道硬件成本高等因素阻碍了三坐标雷达在反无人机领域的进一步广泛应用。
多输入多输出(MIMO,multiple input multiple output)技术利用正交波形形成虚拟通道,可以有效降低通道数量,降低硬件成本。MIMO技术已经引入雷达领域,是一种较为新颖的雷达体制[3]。在MIMO雷达中,多个发射单元通过发射具有正交性的信号,从而在空间不合成高功率波束;多个接收单元同时接收,通过数字波束形成获得同时多接收波束。因而,MIMO雷达具有发射功率低、波束形成灵活的优点。但是MIMO雷达也面临诸多问题。MIMO雷达研究中采用的正交信号通常为码分正交、频分正交或时分正交信号[4-7]。码分正交信号的正交性在实际工程中难以保证,频分正交需要较为复杂的信号发生装置,增大了雷达设备的复杂度。时分正交信号对设备要求较低,目前主要应用于两坐标汽车雷达中[8-9],阵列规模小,能量利用率低。
综合考虑不同正交形式的优劣,本文针对无人机三坐标探测提出一种基于时域复用(TDM,time-division multiplexing)信号的MIMO雷达方案。本文首先介绍了MIMO雷达几种正交信号实现方式,通过比较得出时分正交方式实现简单、系统可靠性更高;然后,介绍了基于TDM的雷达的系统组成,包括信号发生单元、发射机、接收机与雷达终端[10];然后,给出了两维MIMO雷达天线的设计示例,并给出了TDM信号的MIMO雷达处理方法。最后,采用计算机仿真的方式验证了MIMO雷达单点目标的成像与波束形成后的天线方向图。
1 MIMO雷达系统论证
1.1 工作体制论证
目前,无人机技术已经广泛用于军事与民用领域。针对不同用途,无人机的特性差异较大,对雷达探测的要求也有较大差异。小型民用旋翼无人机的速度低、雷达反射截面小,需要雷达具备长时间积累能力;部分侦察无人机的速度快,雷达需要更高的数据率以更好地跟踪目标。
传统的三坐标雷达主要为机械旋转雷达与两维相控阵雷达。机械旋转雷达通过机械旋转实现方位向360°的覆盖,高数据速率需要雷达具有较快的旋转速度,同时对弱目标积累需要较长的积累时间,又需要雷达具有较低的转速,因此传统方位机械旋转雷达不能同时满足高数据速率与长积累时间的需求。
相控阵雷达采用电扫描代替了机械旋转,实现方位向覆盖。但相控阵雷达需要密集的收发组件,因此成本较高。同时,相控阵雷达通常采用分时扫描的方式,因此也无法解决高数据率与长积累时间的矛盾。
针对无人机探测需求,可以采用MIMO凝视雷达体制。MIMO体制凝视雷达通过宽发射波束与接收波束照射目标区域、接收端通过数字波束形成技术形成多波束照射,可以实现对目标空域的凝视照射,通过延长积累时间可以有效提高对微弱目标的检测能力,不需要波束扫描便可以保证对高速目标的高数据率跟踪。除此之外,MIMO技术利用信号的正交性形成虚拟阵列,可以有效减小收发通道数,降低雷达成本。
1.2 正交方式选择
正交信号是MIMO雷达工作的基础[2]。从正交类别来看,目前的正交波形主要包括时分正交、频分正交与码分正交波形。
1)时分正交是通过发射接收时间的分集区分不同的信号,工程实现最为简单,已经在汽车雷达中广泛采用,但是分时发射需要较为充裕的时间资源,并且降低了发射的平均功率。
2)频分正交信号通过频带的分集信号实现信号良好的正交性能,其典型信号形式为通信正交频分复用(orthogonal frequency division multiplexing, OFDM)信号。OFDM技术被广泛应用于通信系统来克服多径干扰,OFDM技术也可用于MIMO雷达,使用方式类似于步进频率方法。在MIMO雷达中,每个子载波通过不同通道发射,每个信号占用不同的频带,通过接收信号处理,还可以得到宽带效果,获得高分辨力。由于需要同时发射不同频带的信号,频分正交信号的发生单元较为复杂、信道带宽相对较高;另外,为了避免雷达组网条件下雷达间的同频干扰,频分正交MIMO雷达需要更为丰富的频率资源。
3)码分正交是MIMO雷达中广泛研究的一种体制,码分正交通过发射正交编码信号避免发射信号功率在空间的合成,典型信号如正交多相编码、正交离散频率编码等。多相编码作为一种脉冲压缩方式在常规雷达中得到广泛应用,通过设计不同编码能够获得多个正交的多相编码信号。正交离散频率编码信号是一种正交频率编码信号。常规线性调频信号的频率在时间上进行离散化,得到离散频率信号。如果对这些频率进行不同规律的编码,则可以得到不同的信号。相比于时分复用与频分复用方式,码分正交所需的时间与频率资源最少,但是通常需要利用搜索优化算法进行编码的正交性优化,通常工程复杂度更高,而且完全正交在工程上实现的难度也较高。
综合考虑三种正交方式的优缺点,对于无人机探测而言,采用时分正交的方式系统复杂度更低、可靠性更高,便于MIMO雷达的工程实现。
2 MIMO体制雷达系统
2.1 雷达系统组成
MIMO雷达系统由信号产生单元、发射机、接收机、发射接收天线与雷达处理与显控终端五部分组成。
信号产生单元包括参考源、射频信号源与中频信号源。基于参考源,中频信号源生成中频带宽信号,中频频率为fI,带宽为B。射频生成射频本振信号,频率为fR,中频信号与射频本振信号输出至雷达发射机。
发射机包括上变频器与M路发射信道,每路发射信道包含功率放大器、发射天线等单元。在发射机中,射频本振信号与中频信号进行上混频生成射频发射信号,然后通过开关选择形成时分复用的M路发射信号,输出至当前时间对应的发射信道,经功率放大器放大后由相应的发射天线发射出去。

图1 基于时分正交的MIMO雷达系统框图
发射与接收天线负责射频信号的发射与接收。MIMO雷达天线中,可以将M路发射天线阵元稀疏布置,每个发射阵元发射覆盖目标空域的宽波束;N路接收阵元密集布置,每个阵元的波束宽度同样覆盖整个空域。在雷达接收转换为数字信号后,通过信号的时域正交切分,M路稀疏发射阵元与N路密集接收阵元可以等效为M×N路的密集接收阵元,即利用MIMO原理,将较少的稀布阵元等效为较多的密布阵元,从而降低对于射频收发信道的需求。
接收机包括N路接收信道,分别对应N路接收天线。每路接收信道均包含低噪声放大器、下变频器、A/D转换器等器件。接收机通过接收天线获得的N路射频接收信号,经过低噪声放大后,进行Dechirp下混频获得视频信号,然后经过A/D转换后获得N路基带数字信号。然后,每路接收信号中,对相邻M个脉冲重复周期的信号进行正交分离,分离出M路发射正交信号。接收机共计输出M×N路等效接收通道信号,传输至雷达处理与显示终端。
雷达终端包括信号处理单元、数据处理单元、显示控制单元与通信单元。信号处理单元完成通道一致性校正、数字波束形成、多普勒处理、恒虚警检测、参数解算等工作。数据处理单元主要完成雷达航迹生成、航迹融合等工作,还可以进行多传感器数据融合处理。显示控制单元主要完成雷达的处理结果显示与界面控制,通信单元主要用于处理结果的输出与控制命令的输入。
2.2 天线设计
为了实现三坐标的搜索跟踪能力,雷达的天线系统采用两维MIMO设计。图2给出了一个两维MIMO天线的示意图。发射与接收采用不同的天线,发射天线的俯仰与方位向采用2×2共4个阵元,阵元间隔为2.5个波长,为稀疏阵列;接收天线的俯仰与方位向采用5×5共25个阵元,阵元间隔为0.5波长,为密集阵列。发射、接收的等效阵元为10×10共100个,等效阵面尺寸为5个波长,等效阵列为密集阵以避免产生天线方向图栅瓣[11]。

图2 两维MIMO天线阵列
天线的发射与接收阵元均产生宽波束,以实现对感兴趣的空域范围覆盖。根据天线阵元尺寸,可以计算得到3 dB覆盖角度范围约为102°×102°(方位×俯仰)。上述角度范围超出了雷达通常的空域范围需求,因此通常可以适当的增大发射单元尺寸,以匹配覆盖空域需求,同时可以增大天线增益,降低功率需求。
在接收端,通过数字波束形成技术形成等效的窄波束。根据以上设计参数,计算可以得到波束形成后的波束宽度约为10°×10°。若需要降低波束宽度,可以通过增加发射或者接收阵元数目的方式实现。其中,增加发射阵元数目需要对应增大时分复用发射脉冲数目,需要考虑对于等效脉冲重复间隔等因素的影响;相比于增加发射阵元数量,实现同等的波束宽度改善需要增大接收阵元的数目更多,需要考虑对于雷达成本等因素的影响。在雷达设计中,需要综合考虑两种方式的利弊,进行合理的选择。
基于以上天线设计可以简单对比MIMO体制雷达相对于同等规模相控阵雷达的成本优势。对于MIMO雷达而言,包括4个发射通道与25路接收通道;对于传统相控阵雷达而言,若同样采用凝视照射体制,实现同等规模阵面需要1个发射通道与100路接收通道。考虑到发射通道成本通常高于接收通道成本,约为3~5倍,则MIMO体制雷达成本约为传统相控阵雷达的成本的36%~43%。相较之下MIMO技术有效降低了雷达前端成本。
2.3 信号处理
MIMO雷达信号处理的流程主要包括Dechip处理、数据截取与波束形成处理。下面给出从雷达发射信号到波束形成过程的雷达信号形式。
对于时分复用的MIMO雷达系统,基本的线性调频发射信号可以表示为:
(1)
其中:t为时间序列,Tp为脉冲重复间隔,fc为载频,Kr为调频率。MIMO雷达发射机的第m路发射通道的发射信号,可以表示为:
sm(t)=p(t-mTp)
(2)
接收机第n路接收通道的回波信号可以表示为:
(3)
其中:τmn为第m个发射通道与第n个接收通道对应的目标时延。
若发射与接收天线阵面均为两维阵面,发射阵列俯仰向有Me个阵元、方位向有Ma个阵元,接收阵列俯仰向有Ne个阵元、方位向有Na个阵元,则发射接收信号的顺序号可以写为:

(4)
定义目标相对于阵面两维角度分别为αe与αa,发射阵元间距为dt、接收阵元间距为dr,目标相对于天线的收发等效斜距为R0,等效径向速度为v,则回波时延可以表示为:
(ne-1)drsinαe+(na-1)drsinαa]
(5)
按照脉冲重复时间进行数据截取,M个脉冲重复周期的N路接收信号可形成M×N路的等效接收信号,时间由t转换为快时间tr=t-mTp。则Dechirp处理后,第m个发射通道与第n个接收通道的信号可以表示为:
xmn(t) =xn(t)sm(t)*=
(6)
将式(4)代入式(6),转换快时间至距离频域,则第m个发射通道与第n个接收通道对应的频域信号为:
Xmn(fr)=z0(fr)e-j2πfcτnm
(7)
其中:z0(fr)为距离频域信号包络,可以表示为:
z0(fr)=sinc[B(fr+Krτnm-fd)]
(8)
若波束中心指向的俯仰与方位角度分别为βe与βa,则进行数字波束形成(DBF,digital beam forming)的波束形成器可以表示为:
Hmn=ejk[(me-1)dtsinβe+(ma-1)dtsinβa+(ne-1)drsinβe+(na-1)drsinβa]
(9)
则波束形成后的信号为:
(10)
其中:ge与ga分别为为俯仰向与方位向的天线增益,可以表示为:

(11)
3 仿真实验验证
基于图2所示两维MIMO天线形式,进行了基于TDM信号的两维MIMO雷达信号处理仿真实验验证,包括针对单点目标的MIMO雷达信号处理仿真与波束形成的天线方向图验证。
针对单点目标进行时分MIMO雷达信号处理仿真的步骤包括回波模拟、Dechirp处理、距离FFT与波束形成处理。回波模拟参数如表1所示,回波模拟结果如图3所示,回波信号为带宽信号且调制至载频,25路接收通道信号与4路发射信号等效为100路等效接收信号。Dechirp并转化至频域后结果如图4所示,信号完成的距离向的压缩处理;波束合成结果如图5所示,100路信号合成为1路信号。

表1 仿真参数

图3 接收信号实部与幅度谱

图4 Dechirp后信号实部与幅度谱
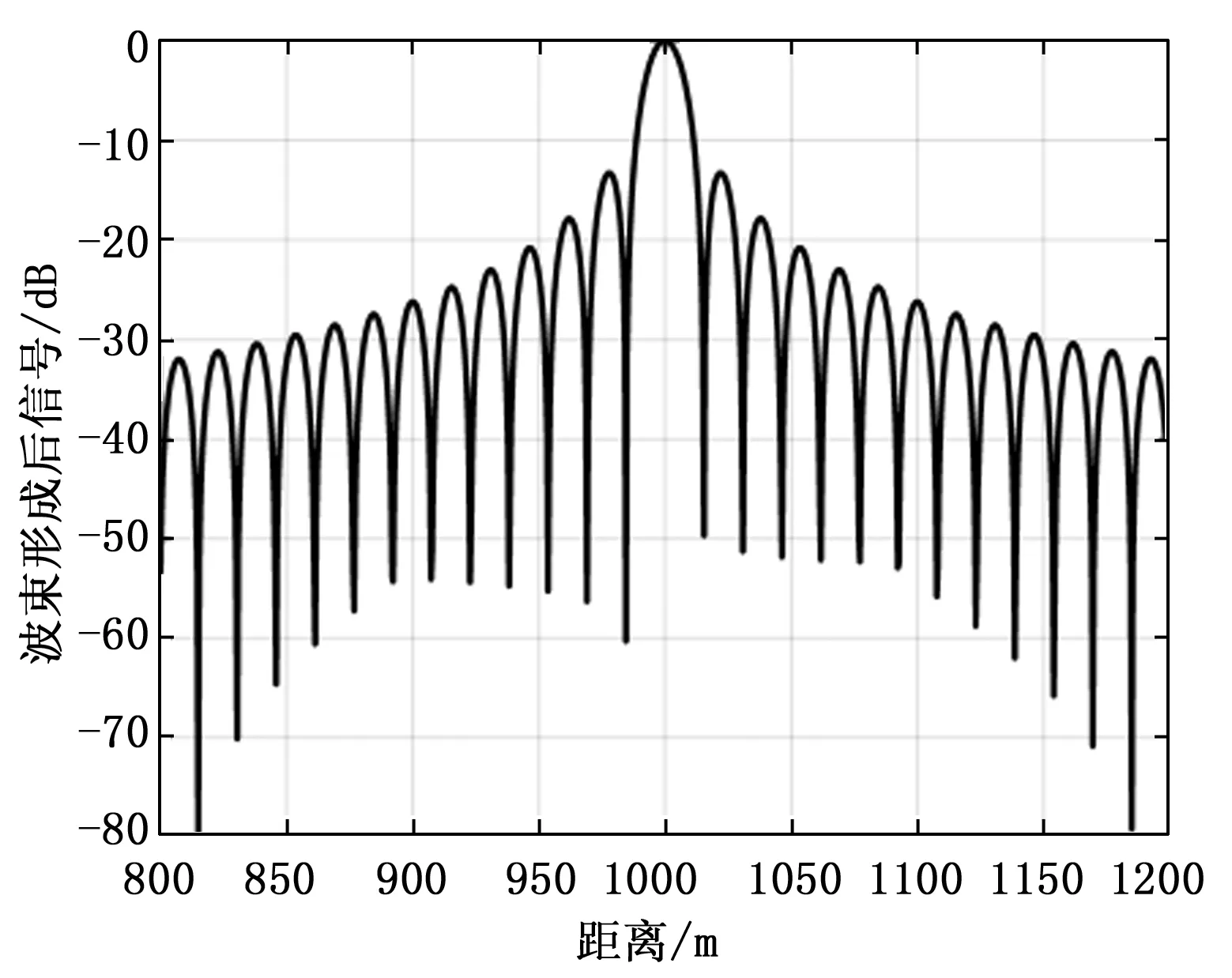
图5 波束形成后的信号
波束形成的天线方向图验证仿真步骤包括:目标设置、波束形成方向设定、雷达信号处理、信号幅度统计。目标设置中在相同距离、不同的俯仰方位设置仿真目标;波束形成方向分别设定为天线法向、βe=15°与βa=20°方向两种情况;雷达信号处理步骤如单点目标处理;信号幅度统计通过统计不同仿真目标波束形成后的信号幅度,得到在不同俯仰与方位方向波束形成器对应的天线方向图。
波束方向为阵面法向的天线方向图结果如图6(a)所示;波束方向为βe=15°与βa=20°的天线方向图结果如图6(b)所示。根据仿真结果,天线方向图的指向与波束形成器的设定指向一致;评估天线方向图第一旁瓣约为13 dB,与预期的天线旁瓣水平基本一致;如果需要降低旁瓣水平,可以通过对波束形成器加权获得。
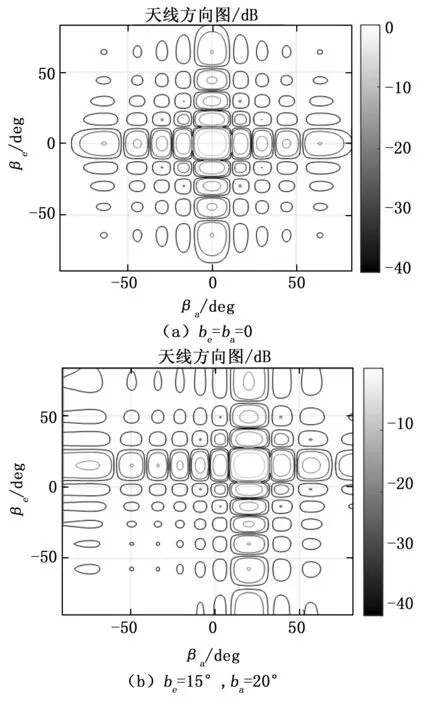
图6 波束形成后天线方向图
4 结束语
本文首先根据无人机探测需求分析了MIMO体制的优势,然后介绍了MIMO雷达的三种正交信号形式,结合近距探测需求与系统可靠性需求选择采用基于时域复用方式。然后介绍了基于TDM信号的MIMO雷达系统组成,介绍了两维MIMO天线的设计示例,分析了MIMO雷达相对于同等规模阵面相控阵雷达的成本优势;最后给出了基于TDM信号的MIMO雷达系统的信号处理流程,并结合仿真实验验证了处理流程的有效性,并仿真波束形成后的天线方向图,验证了基于TDM信号的MIMO雷达的两维波束形成能力。
MIMO雷达作为一种较为新颖的雷达形式,具有成本低、辐射功率低、波束指向灵活与凝视长时间观测的优势。目前,基于TDM信号的MIMO雷达是一种工程可行性较高的方案。未来随着对正交信号研究的进一步深入,基于其他复用方式(特别是或码分复用)的MIMO雷达实现方式也将进一步得到广泛应用,MIMO雷达的性能与灵活度有望进一步得到提高。
