旋翼无人机导航实验教学平台开发
2020-11-02张玲熊智康骏李婉玲李欣童曹志国
张玲 熊智 康骏 李婉玲 李欣童 曹志国
[摘 要] 为了贯彻创新驱动发展战略,国家发布了《中国制造2025》战略计划。教育部为了储备相应人才,于2017年推出了新工科建设计划,目的是探索符合中国国情的工程教育模式。为推动航空科技创新,普及航空知识,提高国民航空意识,营造航空文化氛围,中国航空工业集团公司与中国航空学会已连续六年举办“中航工业杯”国际无人飞行器创新大奖赛。作为其中一个重要项目的“旋翼类竞技”旨在促进无人直升机创新。因此,以旋翼无人机为对象,开展集惯性导航、GPS导航、视觉导航、气压计、磁传感器、激光雷达等各种机载导航传感器于一体的智能感知导航实验平台开发研究,具有极其重要的现实意义。
[关键词] 旋翼无人机;智能感知;实验平台开发
[中图分类号] TP391.9 [文献标识码] A [文章编号] 1674-9324(2020)41-0385-02 [收稿日期] 2020-04-02
南京航空航天大学自动化专业作为卓越工程师培养的重点专业,在培养目标中强调,要掌握自动化工程领域系统设计、实施、运行和维护的基本内容和程序,具有应用适当的理论和实践方法解决工程实际问题的能力。具体到教学内容上,就是强化专业课程实验、课程设计、综合设计等动手类课程的教学要求,培养和锻炼学生对知识的应用与拓展、对方法的验证和创新等方面的能力,实现理论与实践、课堂与课外、精深与综合在教学环节中的平衡化。
针对自动化专业导航方向的学科研究背景,开展基于旋翼无人机的智能感知实验平台开发,可以为定位与导航、测试信号处理等专业基础课程提供更契合专业方向的综合实验环境,也为大学生创新竞赛等实践创新类竞赛活动提供良好的平台,引导学生积极主动的思考与创新,最终培养具有航空航天和国防特色的专业人才。
一、自主飞行控制系统硬件设计
传感器系统主要包括加速度计、陀螺仪、常规GNSS、D-RTK GNSS和摄像机。摄像机部分在任务设备部分阐述。加速度计、陀螺仪和常规GNSS共有三套,实现冗余配置。D-RTK GNSS是高精度导航定位系统,通过实时动态差分技术将三维定位精度由米级提升至厘米级,集成定位、定高和测向功能,弥补了传统GPS、气压计和磁罗盘的不足,为高精度应用需求提供精准、可靠的系统解决方案。
飞控计算机分为上下两层。下层为主控器,综合利用IMU、气压计、D-RTK GNSS、磁罗盘等传感器输出信息实现精准的飞行器姿态控制;上层使用妙算处理板,其使用的NVIDIA Tegra K1处理器,最高主频达2.2GHz,GPU核心具有强大的图像处理能力,还能高效地处理并行任务,使用此处理板完成导航信息的处理、任务规划、路径規划等,最终通过串口向主控器发送飞行指令,完成指定飞行动作。
二、自主飞行控制系统软件设计
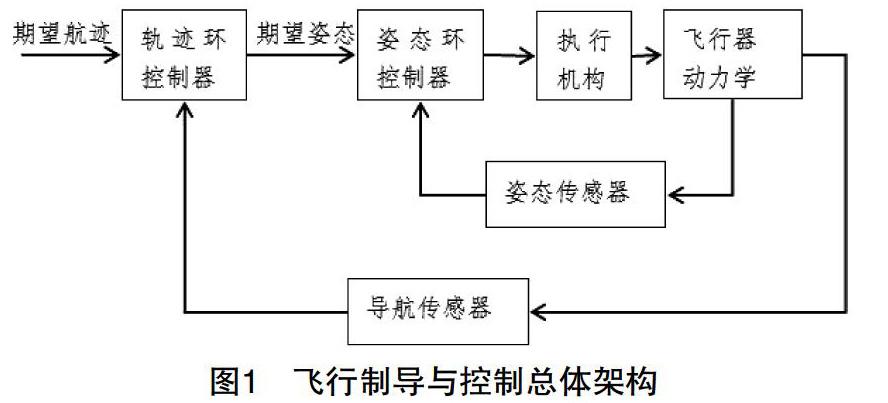
飞行控制系统设计采用经典控制方法,把控制通道划分成内环和外环二部分,外回路以轨迹控制为主,内回路以姿态控制为主,对航向、俯仰、滚转三个姿态通道分别进行控制。在真实的飞行器控制器设计中,运用最多的还是先内环后外环的设计方法。虽然这种方法得不到最优控制律,也更加依赖设计者的经验,但是这种方法更加成熟,设计的控制器结构层次清晰,调试方便,其控制系统的总体结构如图1所示。
三、实验分析
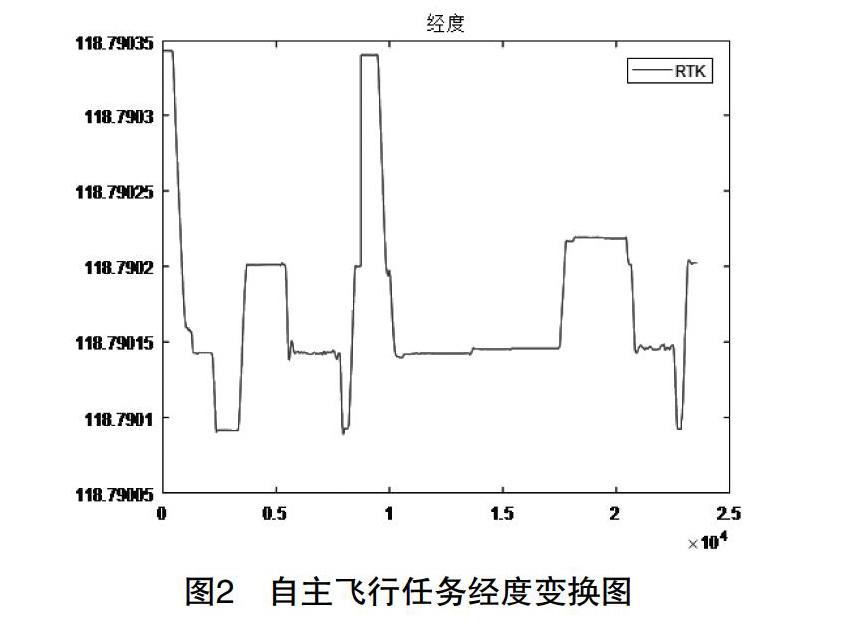
精确引导过程中有对动态性能及稳定性的要求,需要飞行器飞到指定位置所需时间短,调节时间短,超调不可过大,稳态误差小,所以采用分段PID设计控制器。在飞行器距离目标点较远时,采用高动态,大速度的控制参数以缩短飞行时间;在距离目标点1米以内的位置采用低动态,大制动的控制参数以控制飞行器的速度;在距离目标点0.5米以内的位置时,主要调节稳态误差。实验结果如图2所示。
四、结语
本文开发了一套基于旋翼无人机的智能感知导航实验教学开发平台,设计了飞行控制硬件系统,并开发了相应的软件平台。通过实验分析,得到了旋翼无人机自主飞行任务下的位置变化图形,验证了本文开发的基于旋翼无人机导航实验平台的有效性,也为本科实践课程的教学提供了良好的理论与实践基础平台。
参考文献
[1]王帅,周洋.用于危险区域物品清理的四旋翼飞行抓捕手[J].兵工自动化,2011,3(03):78-80.
[2]魏丽娜,宁会峰,陆旺,韩晓静.多旋翼飞行器的关键技术及应用前景[J].自动化技术与应用,2016,(09):1-4.
[3]倪力学,徐贵力.无人机视觉着陆中合作目标的识别技术研究[J].计算机测量与控制,2005,13(11):1260-1262.
