钢轨磨削机械臂结构设计与优化
2020-11-02石亮张爱涛王世旭郎珊珊
石亮 张爱涛 王世旭 郎珊珊
(1中国铁路兰州局集团有限公司兰州西工务段,甘肃 兰州 730050;2 兰州理工大学机电工程学院,甘肃 兰州 730050)
0 前言
钢轨打磨机械是用于对钢轨打磨作业,以实现钢轨保养、维护等的机械设备。传统钢轨打磨机械主要由机架、传动系统、砂轮以及行走装置等部件组成,能够较好地实现对钢轨顶面、侧面等的打磨。但是,现有的钢轨打磨机械普遍存在体积、重量大,运输以及操作使用不便等诸多缺陷,致使对钢轨轨头端面倒棱磨削加工时,现场仍采用人工手握打磨机作业,打磨量依靠工人经验控制,因钢轨端面棱边呈弧状形,从而造成整个加工面尺寸误差过大,磨削精度较低,对后道工序加工带来不良影响,并且全过程劳动强度极大。
因此,如何设计一款专用钢轨端面倒棱磨削机,使其重量小,拆装方便,易于保证钢轨端面棱边加工面的尺寸精度,有效降低工人加工难度及劳动强度,是本领域技术人员亟待解决的问题。
1 机械结构设计
本设计钢轨磨削机械臂由底座固定于钢轨上,纵向进给机构联接在底座上,横向进给机构联接在滑块和丝母上,支臂联接在滑块与丝母上,打磨机固定在支臂上且打磨机磨具刀口与钢轨端面纵向和横向皆成45°角。这样纵向进给机构通过丝母及滑块带动横向进给机构作纵向(上下)进给运动,而横向进给机构通过滑块及丝母带动支臂作横向(前后)进给运动。从而实现打磨机同时进行纵向(上下)、横向(前后)运动,形成弧线运动轨迹,达到对钢轨端面棱边磨削加工的稳定性,保证加工面尺寸精度。
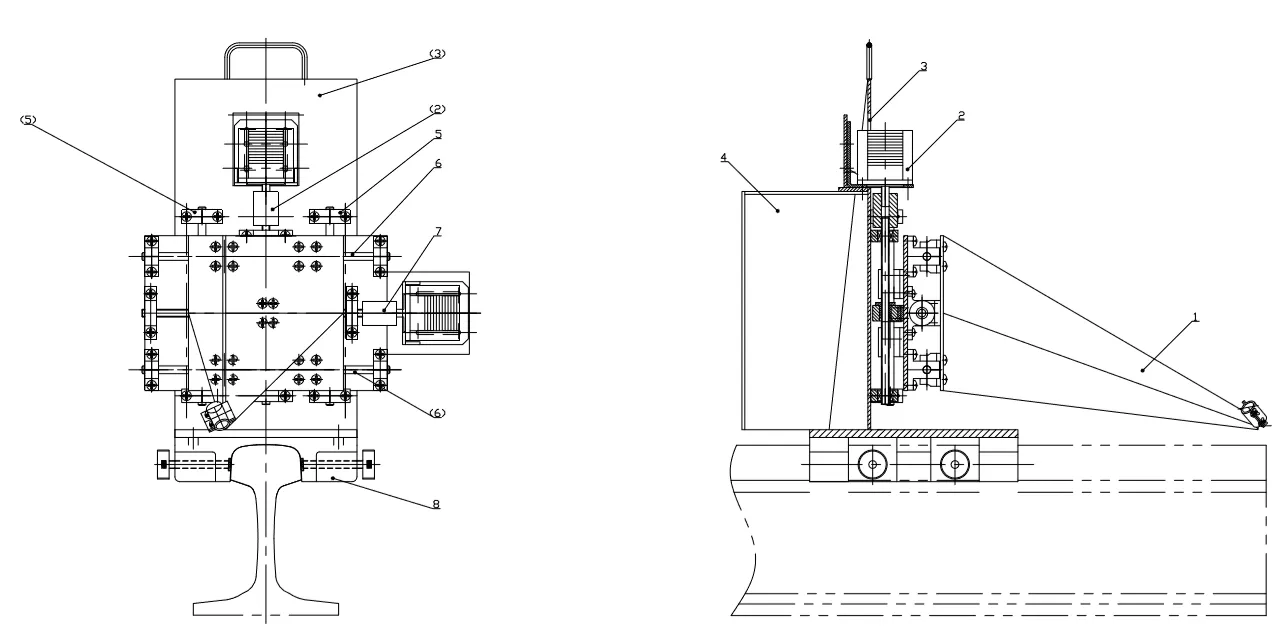
图1 钢轨磨削机械臂结构示意图
2 控制系统
该机械臂由支臂、夹头、纵向进给机构和横向进给机构,以及电气控制系统组成。垂直运动和水平运动分别由步进电动机驱动来完成。控制系统设置有8个按键,用来操作机械臂的移动和切割:分别是+X向、-X向、+Y向、-Y向、快速、停止、复位、自动。
由于导轨端面的外轮廓是由不同曲率半径的曲线段组成的,所以机械臂的切削过程都是在微控器中程序的控制下完成的,以此来保证切削的轨迹能够更加地符合导轨端面的实际轮廓。微控制器分别控制着X向和Y向两个步进电动机,让其同时运转,通过内部的插补算法程序,控制两个方向的电机分别以不同的速度运行,进而插补出圆弧曲线。

图2 钢轨磨削机械臂试切结果
3 试验与结果
使用本设计钢轨磨削机械臂进行现场试验,在作业地点对60钢轨实施倒棱作业。试切结果良好,如图2所示,钢轨倒棱尺寸精度高,表面粗糙度小,轮廓曲线与导轨弧面曲线重合度好。切削速度较高,自动切削有效减轻劳动强度,并有利于提高倒棱作业的标准化操作。
