基于高精度DSM的无人机贴近摄影测量航线设计方案*
2020-11-02吴永春
张 军,吴永春
(1.甘肃工业职业技术学院,甘肃 天水 741025;2.甘肃省测绘工程技术研究中心,甘肃 天水 741025; 3.甘肃省地质矿产勘查开发局第一地质矿产勘察院,甘肃 天水 741025)
传统航空摄影测量、倾斜摄影测量及近景摄影测量技术都已经比较成熟,张祖勋院士2018年提出了将无人机摄影测量与近景摄影测量两种技术相结合的贴近摄影测量技术。贴近摄影测量是控制无人机紧贴地面或者建筑物表面进行相对倾斜和竖直摄影,再对影像数据进行空三和三维建模处理得到3D数据及三维模型的新技术。由于是贴着地面或建筑物表面飞行,相机与地表之间的距离只有20 m左右,所以得到的影像分辨率是非常高的,例如:无人机航飞高度200 m得到的GSD是4 cm,那么飞行高度20 m的情况下GSD就可以达到0.4 cm。本文研究如何依照高精度三维地形设计无人机的航线,以保障无人机飞行安全,满足贴近摄影要求。
1 贴近摄影问题分析
贴近摄影要求控制无人机紧贴地面飞行,为了保障安全,控制无人机与地物之间的距离保持在20 m左右的范围。距离太远影像分辨率降低,失去了贴近摄影的意义,距离太近容易出现安全事故。以大疆精灵4RTK为例,一般情况下航空摄影时飞行速度设置在15 m左右,如果控制不到位,无人机出现安全事故的风险就很大。所以设计满足地形要求的航线是贴近摄影测量技术的核心。
2 以高精度DSM为基础的自适应航线设计
在军用无人机领域有一种基于光电吊舱与GPS/IMU相结合进行地形定位的方法,光电传感器获取无人机与地物距离信息,结合无人机位置姿态信息,可以实现无人机与地形的相对定位,从而即时规划无人机的飞行路径。从思路上来分析,这种方案用于贴近摄影是可行的,但受制于无人机载荷原因,这种方案对于目前的贴近摄影测量技术来说不易实现。
因为无人机贴近摄影对于地形的依赖是很强烈的,所以这里提出给予高精度DSM的航线设计思路,如图1所示为贴近摄影测量航线规划设计框架。

图1 贴近摄影测量航线规划
2.1 高精度DSM、DOM获取
以传统无人机航空摄影的方式采集测区影像,利用pix4D、smart3D等软件快速获取测区DSM、DOM。以大疆精灵4P为例,180 m飞行高度摄影,可得到优于0.1 m分辨率的DSM、DOM。
2.2 建立DSM、DOM分层组织结构
利用LOD技术,构建基于金字塔结构的DSM、DOM分层组织结构,基于四叉树结构进行管理调度,加载高精度的TIFF数据,这样在使用过程中可以随着视点与地形的距离调度加载当前层级地形[3],方便使用。
2.3 以DOM为基础进行基础航线规划
在高精度DOM的基础上准确的获取测区范围,结合相机参数、地面分辨率、重叠度、无人机航速要求等按传统方式规划基础航线。
2.4 自适应航线设计
将基础航线与DSM叠加,重新计算各航点坐标:以传统方式设计基础航线,如图2所示,利用DSM生成坡度图,根据坡度调整航线间隔,调整航点坐标;从DSM上提取基础航线上各航点的高程,这个工作GIS分析软件可以完成,也可以将数值提取的功能集成到地面站软件里来完成(图3为没有高程的原始航点坐标与提取高程后航点坐标对比);此时航点高程为地面高度,加上相对航高即为绝对高程,如图4所示;航点文件与原始DSM叠置进行航点间可视分析,检查航迹的安全性;可视分析通过的航点文件即可作为最终航点文件,若存在不可视的情况,调整该点高程,重新分析;利用DSM计算测区平均坡度,确定摄影时相机倾角。

图2 基础航线设计
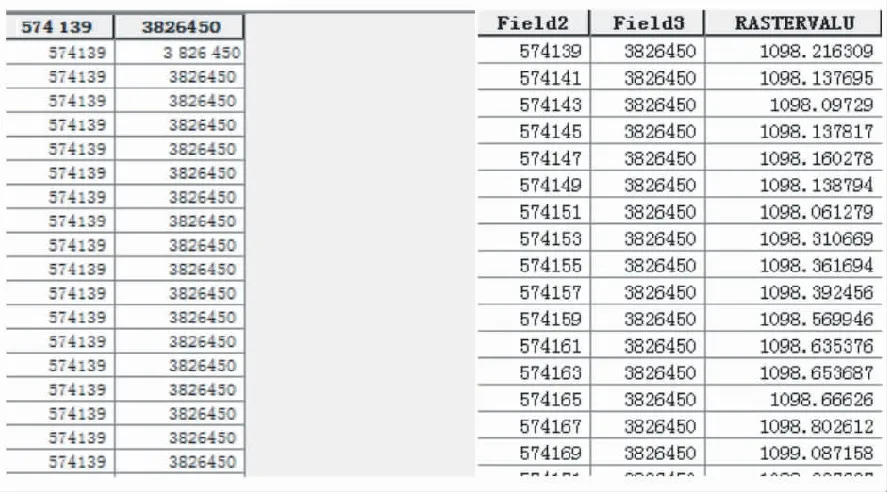
图3 高程提取前后航点坐标
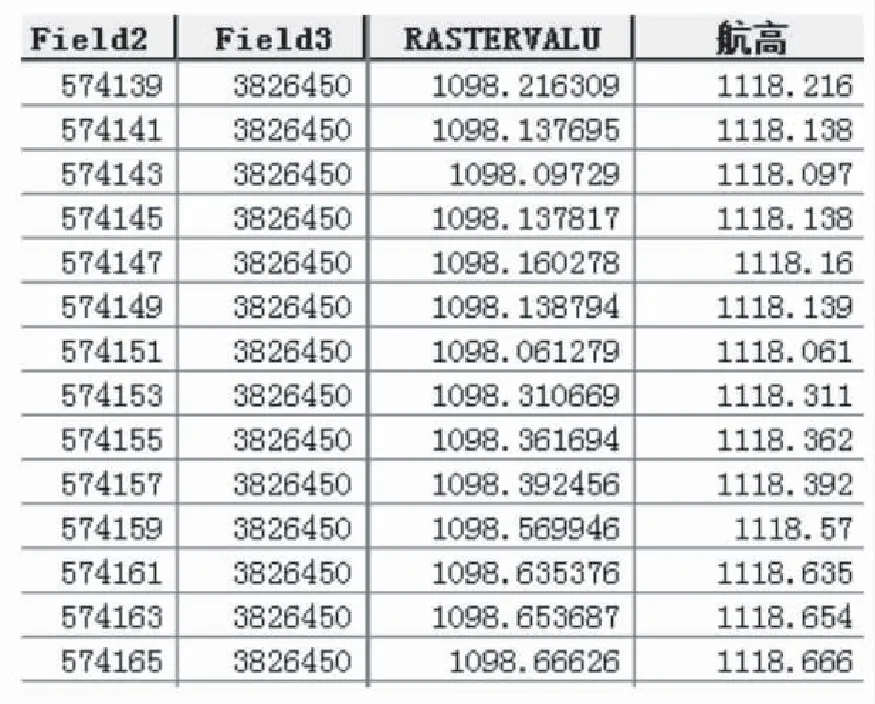
图4 调整相对航高后的航点坐标
2.5 生成航点文件
按倾斜摄影的要求,不同角度分别生成航点文件,结合坡度信息分别计算各条航线的相机倾角。
2.6 应用案例
天水市秦州区某滑坡监测点范围小,地表构筑物少,利用此方法进行了高精度变形监测数据获取,实验采用手动计算航点坐标的方式来完成,具体步骤如下:(1)利用大疆精灵4RTK采用正射影像采集方式获取研究区域4 cm分辨率影像;(2)使用Pix4D快速生成DSM;(3)通过DJI Pilot生成研究区域30 m航高航点正射航线文件并转换为文本格式;(4)利用ArcGIS从DSM上提取正射航线文件航点对应高程,并通过Excle利用正文方案编辑调整航点文件;(5)将航点文件导入DJI Pilot按航点模式飞行,采集测区倾斜影像,分辨率达到0.82 cm;(6)将影像文件导入Smart3D生成高精度的三维模型及正射影像。
测区成果三维模型详尽表达了测区整体现状,通过实验得出以下结论:(1)此方案获取的成果数据分辨率可达到毫米级精度,满足变形监测要求;(2)由于受到控制点自身精度的影响,监测点的绝对精度达不到变形监测要求,但相对精度满足要求,在具体应用过程中,需要利用高精度控制点采集方案。
3 结 语
由于贴近摄影无人机相对摄影面的距离很短,相对航高差对于影像分辨率的影响很大,同时考虑到无人机飞行安全的因素,所以提出以高精度三维地形数据为参考来进行航线规划的方法。通过传统无人机摄影测量方式获取地表最新的三维地形数据,是进行贴近摄影三维地形获取的最可靠方式,此方法通过实验验证,可作为贴近摄影测量航线规划的一种可行方案,但此方案存在的问题是,在贴近摄影之前,需要进行一次预飞来获取地面的三维地形数据作为参考,这就增加了工作量及复杂度,研究如何基于基础航线及地表实际地形实现智能变高飞行,以提高贴近摄影测量的工作效率,是贴近摄影测量技术发展必须面临的问题,是今后需要深入研究的课题之一。
