测量技术RTK-SLAM激光影像背包测绘机器人精度验证*
2020-11-02闫宏昌陈代鑫吕建伟
闫宏昌,陈代鑫,吕建伟
(1.兰州交通大学 测绘与地理信息学院,地理国情监测技术应用国家地方联合工程研究中心,甘肃省地理国情监测工程实验室,甘肃 兰州 730000;2.甘肃林业职业技术学院,甘肃 天水 741020)
移动扫描系统具有不接触物体、速度快、施测的精度高、获取的信息丰富等特点,已然在测绘及建筑领域得到了广泛的应用。目前,由于数据采集方式的不同可以将移动扫描系统分成三类,其中,地面扫描系统包括静态的和背负式的,而静态三维激光扫描需要大量的基准站架设工作,劳动强度大,扫描效率低,基站视野要求开阔,且容易造成地物的遗漏;移动车载扫描适用在车辆能够通行的宽阔的街道或建筑物排列比较整齐的场地等,并且受作业方式的限制,无法在建筑物内进行作业。
RTK-SLAMTM背负式激光雷达测绘机器人是在传统的移动式三维激光测量的基础上,进一步改善数据采集方式,采用背负式激光扫描,克服了环境对测量的限制,如GPS信号、地形等,提高了数据采集的便携性和适用性。
1 数据的采集及数据处理
1.1 数据采集
本文主要以欧思徕(北京)智能科技有限公司生产的移动扫描系统采集设备,如图1所示,仪器参数如表1所示,采集甘肃某高校校园地形图,通过实际采集数据与传统作业方式做精度对比,验证了背负式移动扫描系统在进行大比例尺地形图测绘时的高效性和高精度性。本次的数据采集范围主要为学校建筑物的外围立面和校园内部,背负式移动测量系统采集流程主要包括数据采集路线的规划,架设静态GPS接收机,初始化扫描系统,实地数据采集,内业数据处理等。

图1 数据采集设备结构

表1 主要技术参数
外业数据采集步骤主要为:
(1)使用Google Earth了解校园的现场情况,对数据采集的整体路线进行规划。
(2)实地架设GPS基准站,对移动扫描系统进行初始化。根据已经规划好的路径,完成现场采集数据,测区总面积约0.27 km2,内外业采集数据用时80 min。
(3)数据预处理。将采集得到的数据进行预处理,输出具有彩色信息的“.las”点云数据,如图2所示。

图2 点云数据
(4)成果输出。输出具有RGB属性的点云数据及行走轨迹和全景照片。
(5)数据融合。对获取的点云数据通过抽稀处理,实现与全景照片的精细叠合,如图3所示。

图3 点云融合全景影像
1.2 内业数据处理
OmniSLAM Mapper是背负式激光雷达测绘机器人的配套处理软件,可将背负式激光雷达测绘机器人采集到的原始数据进行自动化处理,得到校园的点云数据、轨迹数据等。
2 测绘成果精度评价
利用前面处理好的点云数据对其量测精度进行验证,分别验证点云数据的平面绝对位置精度、高程精度,平面相对精度。
2.1 平面绝对位置精度
采用提取点云特征点对比全站仪测量坐标的方法,检查平面绝对位置精度,具体实施步骤如下:
(1)将处理好的点云数据使用Cyclone进行平面剖切,获取完整的剖切处点云数据,切片厚度约2 cm。

表2 平面精度对比/m
(2)对得到的剖切点云检索接近检查点的近邻域点云。
(3)采用最小二乘平面拟合算法[9]选取精确的鲁棒数据进行迭代,拟合出比较精确的地形特征点。
(4)采用最小平方中位数算法对近邻域中的点云选择适宜的直线模型。
(5)采用拟合的方法,将拟合得到的直线模型作为基础模型,通过迭代特征值最小二乘算法对原始点集不断进行拟合,以达到剔除异常点云的目的,使该模型能够达到最为精炼的效果,最终能够得到精确的直线模型。
(6)删除直线模型拟合所采用的近邻域点云,利用剩余的近邻域点云再次执行前面步骤,反复进行迭代,直到最终的点云数量少于设定的限值时,停止迭代。
(7)这时就得到了一组拟合直线模型,确定拟合直线模型的交点。选择近邻域内距离与待检查特征点最近的交点作为坐标比对点。
将拟合得到的直线模型交点与全站仪测得地形图上同名点进行坐标精度比对。计算平面点位的中误差,评定平面点位的绝对精度。
依据现行的国家测绘成果标准《测绘成果质量检查与验收》(GB/T24356-2009)所采用提取高精度检测点的方法进行对比分析,利用公式(1)进行精度检测,最终得到的结果如表2所示。
(1)
由表2可知,平面点位中误差为±0.027 m,最大点位误差为JC013的0.042 m。依据《工程测量规范》(GB50026-2007)中对平面点位的精度要求,一般地区图上点位中误差为±0.800 m,相应的1:500比例尺地形图平面中误差限差为±0.400 m。因此,利用RTK-SLAMTM背负式激光雷达测绘机器人测绘的点云精度,能够满足测绘1:500比例尺地形图的精度要求。
2.2 高程精度
大比例尺地形图的高程精度检查主要是通过对高程注记点以及等高线高程插求点的精度检查。通过采用滤波的拟合算法将外业采集到的彩色的扫描点云数据分割成为地面上的点和非地面点,在地面点中,通过拟选择高程点的范围确定近邻域高程点集,计算该近邻域点集的重心,作为高程检查最终的点云高程。然后,用该点云高程值与全站仪测得的该点的高程值做精度对比。
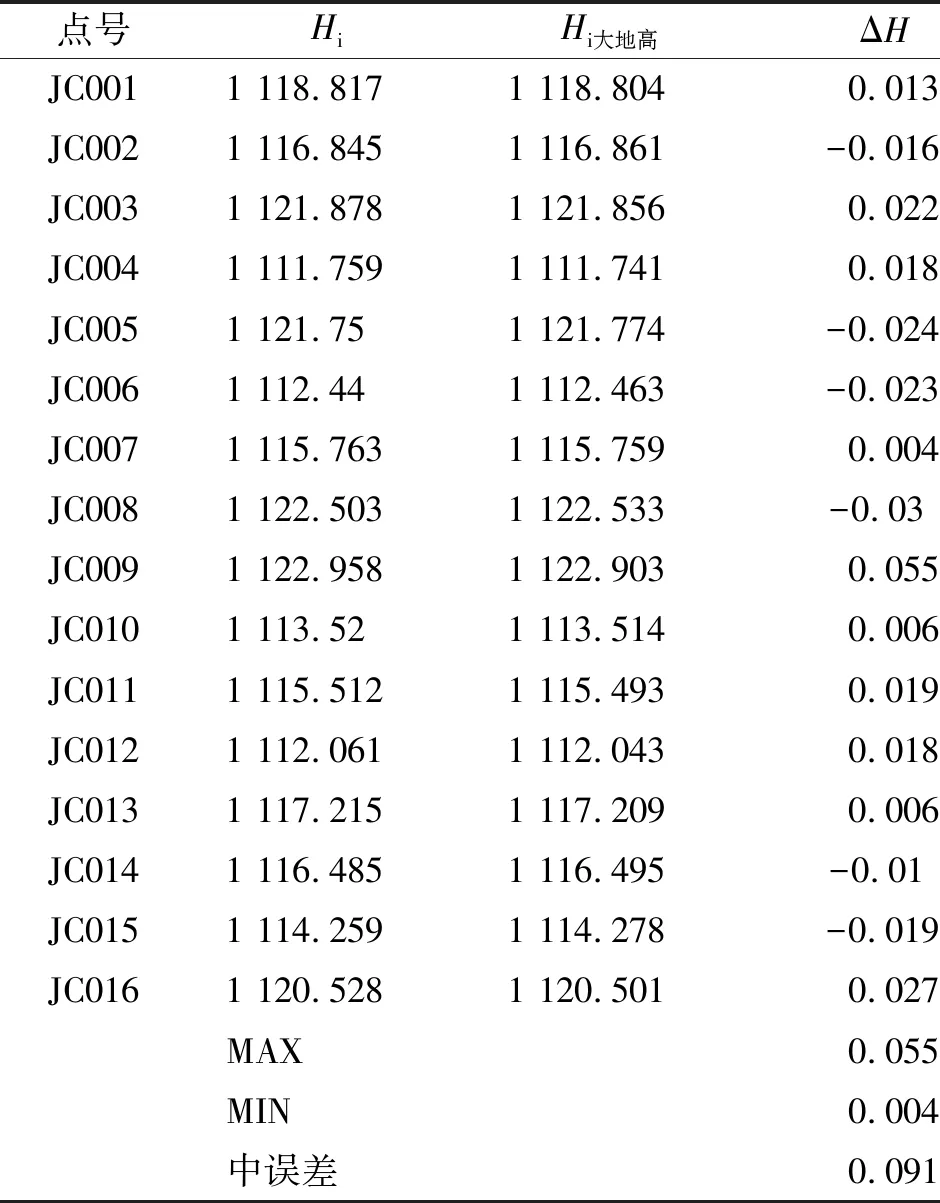
表3 高程精度对比/m
依据《工程测量规范》(GB 50026-2007)中平面点位的精度要求,一般平坦地区,高程中误差为1/3倍等高距,相应的1: 500地形图所要求的高程中误差为±0.167 m。由此可见,利用背负式移动扫描系统点云精度测绘的1:500地形图的测绘精度明显优于上述规范的要求。
2.3 平面相对精度
平面相对点位精度验证主要通过在三维点云或者点云切片中,人工采取点到点、点到面的交互式测量模式,去量测点云地物点间距及地物的边长,与实际环境中采用钢卷尺及全站仪量取相对应边长或间距进行比较,计算间距较差中误差,以此去评价背负式测量机器人量测平面相对位置的精度。
2.3.1 室外数据
在进行室外数据采集的时候,首先,应根据实地的环境进行采集路线的规划,从而提高数据采集的效率和点云质量。其次,使用采集设备环绕场地进行室外数据采集,将采集到的数据导入到OmniSLAM Mapper中,选取广告牌、花坛、台阶、石砖、路标牌等作为特征地物,如图4所示。再次,利用测距仪、钢卷尺实地丈量该特征地物的尺寸,将所采集到的点云数据与该数据进行对比,计算出中误差。

图4 特征地物量取示意图
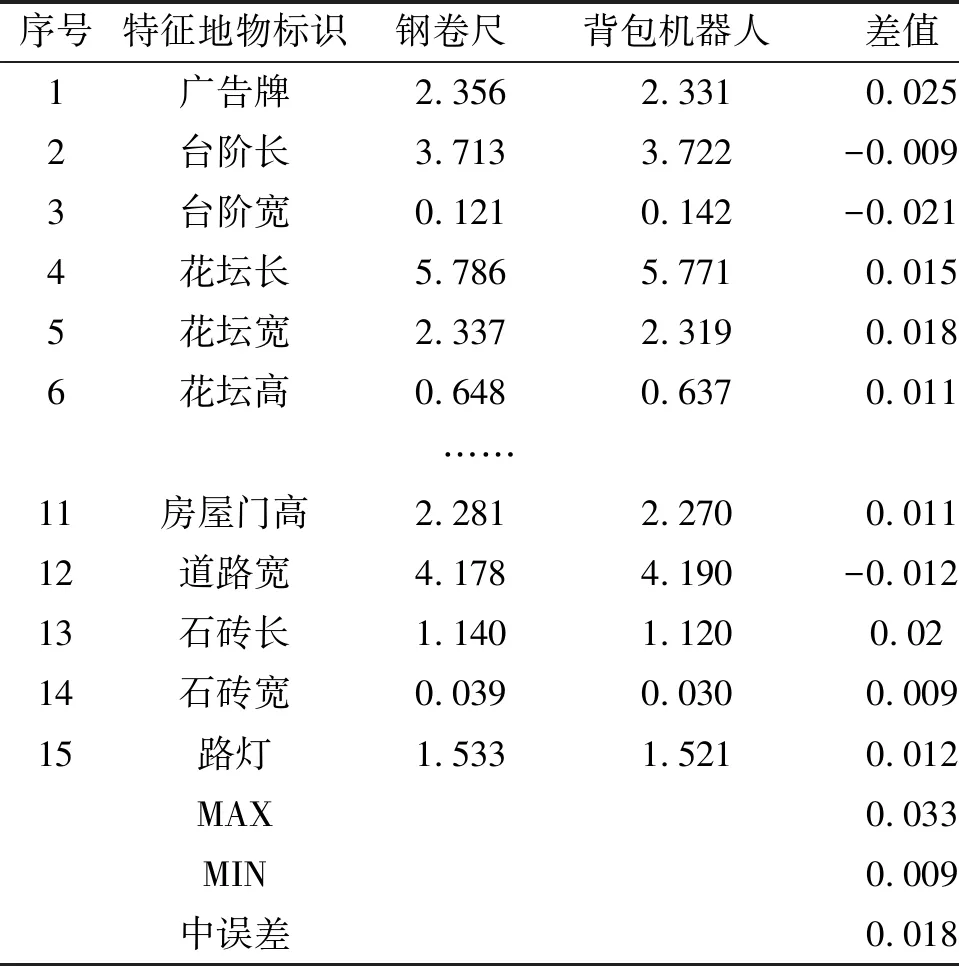
表4 室外特征地物尺寸对比/m
通过表4可以得出,背包机器人采集的数据精度大部分在厘米级,其中,车辆减速带的中误差最大达到0.033 m,究其原因,主要是由于减速带获取的点云数据较稀,且减速带距离仪器较远,所以点云间隔较大,误差也较大。在进行距离对比时,选点的误差对其精度也有影响,通过计算最后得到室外的量测中误差为0.018 m。
2.3.2 室内数据
该数据采集的过程与室外数据采集的方式基本保持一致,通过采用背包机器人采集到的数据与钢卷尺量测的数据进行对比,获取室内数据采集的中误差。
通过外业实测与内业计算最终得到室内点云中误差为0.016 m,其中,最大中误差为窗户的中误差为0.033 m,究其原因,主要是与玻璃的反光及采集的距离有关。

表5 室内特征地物尺寸对比/m
3 时间效率对比评价
分别使用全站仪和GPS-RTK组合测量的方式和背负式移动扫描系统测量某高校1.1 km2大比例尺地形图,通过时间效率对比,得出的对比图如图5所示。

图5 测区时间效率对比
如图可知,背负式移动扫描测量系统明显缩短了外业数据采集时间,运用本系统进行地形测量不需要进行图根点测量,并且基准站测量时间有效缩短。两种测量模式内业成图和补测时间大致相同。背负式移动扫描测量方法时间效率优势在野外地形要素采集时间,把大量的野外劳动转移到内业工作,同时节约了一半的作业时间,从整体工作上提高的时间效率约50%。
4 结 论
实践证明,将背负式移动扫描系统应用于大比例尺地形图的测绘是完全可行的,并且精度能够满足1:500比例尺地形图的测绘要求。与传统的测绘方式相比,背负式移动扫描系统具有施测方式灵活、施测精度高、速度快、自动化程度高等优点。对该系统应用于大比例尺地形图测绘进行深入分析,所得结论如下:
(1)由于点云的选取误差直接影响了最终测量的精度,所以提出了一种在近邻域中如何选取精确坐标点云的方法。
(2)通过对背包机器人与全站仪量测的CGCS2000坐标进行比较,最终得出,背包机器人不仅能满足大比例尺地形图中平面精度与高程精度的要求,而且测量精度较高。
(3)通过对背包机器人与钢卷尺量测的相对精度比较得出,室内量测精度要优于室外量测精度,并且该系统能满足在无GNSS信号的条件下施测,对以后的地下室量测具有现实意义。
(4)从背包机器人与常规测量手段的施测效率对比分析,明显看出该设备的优越性。
由于点云数据普遍存在噪点的原因,显现出使用该方法的局限性,而且由于该系统测量距离的局限,使得点云数据易出现空洞现象,将激光点云数据与摄影测量点云数据结合起来可弥补该系统的不足。
