风机塔筒倾斜的液体静力水准自动监测方法研究
2020-11-02周振宇赵浩鹏
周振宇,高 晓,赵浩鹏
(中国电力工程顾问集团西北电力设计院有限公司,陕西 西安 710075)
风力发电作为一种绿色清洁能源,受到世界各国的重视。作为风力发电机的重要组成部分,风电场的塔筒支撑着机舱和叶轮稳定运行,同时吸收机组震动。风力发电机组的正常运转要求塔筒有足够的稳定性,因此,需采取测量手段对施工和运营过程中风机塔筒安全状况进行监测。传统的测量方法是通过水准仪来测定高程的变化,这种方法虽然能满足各种精度要求、灵活性大,但耗费大量的人力、财力和物力,且观测数据有限,不能实现实时动态监测,不宜大规模推广。随着软硬件技术、数据处理技术以及通信技术的发展,液体静力水准自动变形监测技术为风机塔筒全天候无人实时监测提供了实现的可能[1]。
1 静力水准测量系统
1.1 静力水准测量基本原理
液体静力水准测量实质上是利用在重力作用下静止液面总是保持同一水平面的特性来测量监测点之间的高差和变化量[2-4],其原理如图1所示。

图1 液体静力水准基本原理
在工作基点及需要监测点上设置主机,通过软管连通,其内部充适量防冻液。当计算机发出测量指令后,若观测点发生垂直位移,则会产生相对位置变化,该变化值将转化为一个电信号输出,经模数转换后直接发送至计算机[5]。计算机数据处理程序通过对采样数据进行处理与分析,确定沉降相关信息,为有关部门提供所需的资料。
1.2 系统数据处理
静力水准仪基准点液位变化量Δhj(mm)可按下列公式计算:
Δhj=Kj·(Fj-FOj)
(1)
式中,Kj为基准点传感器系数,mm/F;Fj为基准点当前读数,F;FOj为基准点初始读数,F。
各观测点液位变化量Δhi(mm)可按下列公式计算:
Δhi=Ki·(Fi-FOi)
(2)
式中,Ki为观测点传感器系数,mm/F;Fi为观测点当前读数,F;FOi为观测点初始读数,F。
各观测点沉降或抬高的变化量ΔHi(mm)可按下列公式计算:
ΔHi=Δhj-Δhi=Kj·(Fj-FOj)-Ki·(Fi-FOi)
(3)
2 液体静力水准自动化监测系统构建
2.1 安装静力水准仪
根据设计要求在风机塔的测点处确定标高,各测点的静力水准仪安装标高应相同。
通过膨胀螺栓将系统中各测点静力水准仪安装架固定在墙壁上,并确保各安装架标高基本相同。同时,安装静力水准仪时,应考虑其中观测电缆的走线方向与保护方法。
2.2 安装贮液容器
各测点静力水准仪安装架固定完成后,安装贮液筒底板于安装架的3个调节螺栓上,并通过水平泡调节螺杆上的螺母使贮液筒底板保持水平。同时,贮液容器安装完成后,应核定和调整各测点高程是否保持一致。
吴兴区是湖州市的建筑石料开发利用基地。历史上不合理的矿山开采造成了吴兴区生态环境的破坏,资源的浪费,与生态文明建设要求不相符合。为解决这一问题,吴兴区以实施“百矿示范、千矿整治”活动、“四边三化”行动、“矿山复绿”行动为契机,2003年起采取规划引导、分步实施,因矿制宜、分类治理,工程示范、典型引路等措施,持续深入开展矿山生态治理,消除安全隐患,改善矿区周边生态环境,有效利用矿地。截至2017年底,累计治理废弃矿山(关闭矿山)30余个,产出土地约3000余亩(其中复垦成耕地约2000余亩,已作建设用地利用约1000亩),为吴兴区经济发展、生态文明建设作出了贡献。
2.3 连接通液管
在多点静力水准系统中应设置主通液管和副通液管,即各测点静力水准仪之间并非直接连通,而是各自通过副通液管与主通液管连通。当各测点连通后,应用卡箍将通液管管口与管接头相联处锁紧,防止松动与漏液。
2.4 安装传感器
先旋下静力水准仪上端盖,再取下磁致伸缩液位传感器测杆上的止位环与浮球。将传感器测杆插入静力水准仪上端盖的螺纹孔中,用力旋紧使之固定牢靠。再将之前取下的浮子按原方向穿在传感器测杆上,同时将止位环复位固定在测杆端部,最后旋紧传感器的上端盖。
2.5 连接通气管
系统中通气管的作用在于保持各测点静力水准仪贮液容器内的液面压力一致,各测点通气管应相互连通并仅在一端与大气相通。
2.6 数据采集与传输
在计算机上安装自动测量单元数据采集管理软件,可任意选择其中实时采集、定时采集、离线采集的方式采集和显示测量数据。数据传输方式通常可采用有线通讯方式和无线通讯方式[6-7]。
3 自动监测数据采集与分析
3.1 实验数据采集
实验工程位于华能陕西某风电场,场区地表为湿陷性黄土,厚度约16 m左右。风机基础采用的是干作业扩底混凝土灌注桩(端承桩)。承台底部为直径16 m、高1.1 m的圆柱,上部为顶面直径6 m、高1 m的圆柱。风机塔筒基础环是联结风机塔筒与塔筒基础的纽带,为一直径约4 m的圆形钢环,由许多螺栓将其固定在另一相同的预埋在基础上的钢环上。安装时要求基础环环面为水平面,考虑各种误差的存在,规定环面的倾斜度不大于2 mm。基础沉降及塔筒所受风力的影响都能从基础环面的倾斜变化中反映出来。因此,在基础环四周均匀、对称布设8个测量钵体作为本次测量的监测点(1~8),如图2所示。将防冻液(凝固点:-20℃)作为连通液体,并在其表面覆盖少许甘油以减小挥发现象对测量精度的影响。该套液体静力水准仪最小监测周期为 0.3 s,灵敏度为0.01 mm。在考虑监测精度与有效性的基础上,为减小观测数据传输负担,试验数据的采样间隔设定为180 s。
3.2 监测成果分析
图3为本工程7#风机塔筒某期液体静力水准观测数据与同时期利用标称精度为每千米高差中数偶然中误差±0.3 mm的天宝TrimbleDiNi电子水准仪观测数据沉降曲线对比图。

图2 塔筒监测点布置示意图
影响液体静力水准高程测量精度的因素主要包括外界条件和仪器因素。当监测点之间的距离较近时,连通的两个钵体相隔较近,由温度和气压差异引起的测量误差较小[8]。当各观测头温差小于2 ℃,且采取一定的防风措施后,该液体静力水准装置监测精度优于0.1 mm。因此,液体静力水准测量可以得到很高的精度,完全能满足风机塔筒变形监测的需要。
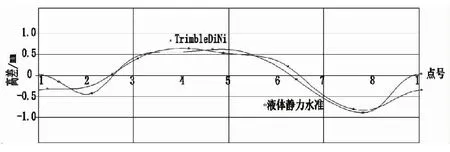
图3 塔筒基础环水平度曲线对比图
4 结 语
由于液体静力水准自动监测系统具有监测精度高、自动化程度高、系统稳定性好等特点[9-10],可广泛应用于有辐射、爆炸危险或蒸汽、尘埃等污染的区域。同时,当监测空间狭小、监测点不通视或因空气紊流等影响,光学测量不能正常作业时,该系统可发挥积极作用。
经过对风电场液体静力水准自动监测系统的研究,发现该系统也存在一些不足。比如:当风电场较大、风机间距离较远时,该系统的监测精度会受到一定的影响,这主要是由于温度和气压的差异引起的误差;另外,由于液体的粘滞作用,静力水准仪中管路内部的液体需要时间才能流动并且平衡,在短时间内无法实现高速测量沉降变化量,对于在建工程应用效果不佳。
