Multi-target tracking algorithm based on PHD filte against multi-range-false-target jamming
2020-11-01TIANChenPEIYangHOUPengandZHAOQian
TIAN Chen,PEI Yang,HOU Peng,and ZHAO Qian
School of Aeronautics,Northwestern Polytechnical University,Xi’an 710072,China
Abstract:Multi-range-false-target(MRFT)jamming is particularly challenging for tracking radar due to the dense clutter and the repeated multiple false targets.The conventional association-based multi-target tracking(MTT)methods suffer from high computational complexity and limited usage in the presence of MRFT jamming.In order to solve the above problems,an efficien and adaptable probability hypothesis density(PHD)filte is proposed.Based on the gating strategy,the obtained measurements are firstl classifie into the generalized newborn target and the existing target measurements.The two categories of measurements are independently used in the decomposed form of the PHD filte.Meanwhile,an amplitude feature is used to suppress the dense clutter.In addition,an MRFT jamming suppression algorithm is introduced to the filte.Target amplitude information and phase quantization information are jointly used to deal with MRFT jamming and the clutter by modifying the particle weights of the generalized newborn targets.Simulations demonstrate the proposed algorithm can obtain superior correct discrimination rate of MRFT,and high-accuracy tracking performance with high computational efficienc in the presence of MRFT jamming in the dense clutter.
Keywords:multi-range-false-target(MRFT)jamming,multi-target tracking(MTT),probability hypothesis density(PHD),target amplitude feature,gating strategy.
1.Introduction
Multi-range-false-target(MRFT)jamming is an effective category of the electronic countermeasures(ECM)[1].Generally,the range false targets are generated by using the digital radio frequency memory(DRFM)[2],and they are similar with the true target echoes but distributed to different ranges[3].Thus,the false targets are easy to mask true target information or saturate the tracking system[4].Recent investigations of multi-target tracking(MTT)with MRFT jamming are mainly focused on false target recognition and cancellation[5],such as frequency-agile[6],radar network data fusion[1,7,8],and target feature extraction[9–11].Generally,the target feature extraction methods are widely used due to the low radar requirements[10,12].The statistical characteristics of angle measurements were used in[9]to obtain stable target tracking in the presence of MRFT jamming.However,the correct recognition rate and the tracking accuracy decrease sharply in the dense clutter environment.In[10],the amplitude and phase quantization information combined with complicated evaluation methods were used to suppress MRFT jamming.In above algorithms,the traditional joint probabilistic data association(JPDA) filter[13]was used to handle the MTT problem in the dense clutter environment.However,the JPDA method is generally applied to the situation where the target number is known and fixed[14],and has exponentially growing complexity as the target number increases[15].Therefore,the usage of the JPDA method is seriously limited.
As an alternative to the association-based method,the random finite sets(RFS)method is a burgeoning MTT technique[16].A novel probability hypothesis density(PHD) filter in[17]can avoid the problem of combination explosion due to data association[18,19].Typically,the amplitude feature likelihoods were introduced to the PHD filter in[20].This method can significantly improve the target tracking accuracy in the presence of the dense clutter with only minor additional computational load.Furthermore,a data-driven PHD filter was used in the dense clutter environment in[14].The algorithm uses a novel gating strategy to classify the measurements to improve the tracking performance with an acceptable computational efficiency.The above methods have a good ability to suppress the dense clutter with potential computational efficiency.However,MTT with MRFT jamming in the dense clutter environment is still troubled,especially for the sequential Monte Carlo(SMC)PHD filter.Lots of false targets and clutter particles participate in the update process[21],resulting in a sharp increase in the computational complexity and deterioration in tracking accuracy.The latest RFS-based methods such as cardinalized PHD(CPHD)[22],labeled multiBernoulli(LMB)[23]and generalized LMB(GLMB)[24],have been greatly improved in estimation accuracy and target track formation.However,they are still problematic in computational efficiency and tracking accuracy when dealing with MRFT jamming and the dense clutter.
In order to solve the problems related to MRFT jamming,as well as the dense clutter and high computational complexity caused by jamming,an efficient MTT algorithm is introduced in this article.Based on the gating strategy,the measurements are divided into the generalized newborn target and the existing target measurements,and they are independently used in the decomposed form of the SMC-PHD filter.In addition,target amplitude information and phase quantization information are introduced into the SMC-PHD filter to suppress MRFT jamming and the dense clutter.The simulations verify the reliability,accuracy and computational efficiency to suppress MRFT jamming and the dense clutter of the proposed algorithm.
This paper is organized as follows.Section 2 briefly reviews the PHD filter and the tracking models with auxiliary information.In Section 3,an efficient MTT algorithm based on the decomposed form of the PHD filter is introduced to suppress MRFT jamming and the dense clutter.The gating strategy is given in Section 4 to identify the attributes of the measurements.Simulations are presented in Section 5,while the conclusions are drawn in Section 6.
2.Preliminary
As shown in Fig.1,the true target and the corresponding range false targets appear in the range of similar angles in the presence of MRFT jamming.

Fig.1 Diagrammatic sketch of MRFT jamming
The problem addressed in this paper is to obtain accurate target tracking from MRFT jamming and the dense clutter with acceptable computational efficiency,and involves a single sensor.
2.1 Standard PHD filter
Under the RFS framework,define the measurements and the object states aszk,1,...,zk,M(k)andxk,1,...,xk,N(k).M(k)andN(k)are the number of the measurements and the objects at timek,respectively.The multitarget measurements and the multitarget states[25]can be expressed as

whereF(Z)andF(χ)are the finite subsets of the observation spaceZand the state spaceχ,respectively.

Generally,the PHD filter consists of two steps:prediction and update.If we do not consider target spawning,the prediction equation of the PHD filter[17]is given as wherepSis the survival probability,πk|k−1(x|·)is the transition density,f(x)g(x)dx,andγk|k−1(x)is the intensity of newborn targets.Based on the new obtainedZk,the updating[17]can be given as

wherePD(x)andκk(z)represent the detection probability of the target and the clutter PHD,respectively.gk(z|x)is the measurement likelihood of the target.
2.2 Tracking models with auxiliary information
In order to determine the attributes of the measurements,target auxiliary information is introduced into the PHD filter.The auxiliary information mainly refers to the target amplitude and phase quantization information.Different from the existing methods[14,21,25],the proposed algorithm distinguishes between the existing and the newborn target measurements to accelerate the filtering speed,and suppresses MRFT jamming and the clutter at the same time.
In many tracking scenarios,from a statistical point of view,the amplitude of the MRFT signal isνtimes of the corresponding true target signal[26,27],andνranges from 1.3 to 1.5,while the amplitude of the clutter signal is weaker than that of the true target signal[20,28].The distinguishing accuracy between the target echo and the deceptive jammer will increase with the jamming-to-signal ratio(JSR)[10,29].However,due to the random error,the misjudgment probability is large by simply using the amplitude of the signal when the JSR is low.
DRFM needs to sample and quantize the intercepted signals before transmitting,and the quantization process inevitably distorts the signals.In order to quantify the error introduced by the DRFM with respect to the target signal,the jamming signal error angle(JSEA)μwas introduced in[30]as

wherepandqare the amplitude normalized signal vectors of the radar transmit and the target echo,respectively.Ideally,the JSEA for the true target signal is zero,and it is greater than zero for the range false target signal.Hence,the true and the range false targets can be distinguished by comparing JSEA with zero.The angleμdepends on the number of the quantization levels.More details of the computation can be found in[30].
In this paper,the amplitude information and the JSEA extracted from the signal are jointly used to suppress MRFT jamming and the clutter.An augmented state of the target is introduced,containing the position,the velocity,and the amplitude information,i.e.,

where 1+Sis the expected(or mean)signal-to-noise ratio(SNR).The target statexis given as,whereandrepresent the position and the velocity vectors,respectively.
Similarly,the measurement vector can be augmented as

whereais the amplitude of the signal return,a0.z=[ρ,θ,β]Tis the position measurement,andρ,θandβare radar measurements of range,pitch angle and azimuth angle,respectively.μis only used for range false target identification,so subsequent representation can be simplified as
2.3 Amplitude feature likelihoods
In order to suppress the dense clutter,an amplitude feature is introduced to improve the discrimination accuracy about the measurement attributes.
The amplitude information of the target is only related to the SNR of the echo.Generally,the target SNR fluctuates in a random manner,and can be modeled by the fluctuation models[31].For aircraft targets,the Rayleigh target amplitude fluctuating model is adopted to describe the amplitude informationa[20].The amplitude probability densities for the target and the clutter are given by
De fining the detection threshold asτ,then
Probabilities of detection and false alarm(S)andare
Generally,the amplitude information and the location information are independent of each other,so the likelihood of the clutter and the targetsc(z)and[20]can be denoted by

whereca(a)is the clutter amplitude likelihood function,andga(a|S)is the target amplitude likelihood function.In the view of the detection thresholdτ,the amplitude likelihood functions can be rewritten as

where(a)=pτc(a),and(a|S)=(a|S)[20].The superscript is used to indicate the measurements exceedingτ.
Generally,the target’s SNR varies with respect to the aspect angle.Assuming that the target’s SNR is a uniform distribution of[dB1,dB2]in the dB domain,and the corresponding parameterSis in the region[S1,S2],then the amplitude likelihood function for the target[20]can be simplified as

3.MTT algorithm based on SMC-PHD filter
In this section,on the premise that the attributes of the measurements are distinguishable,the suppression of MRFT jamming and the clutter in the SMC-PHD framework is realized.
3.1 Decomposed form of PHD filter
Generally,the obtained measurement setZkconsists of the measurements originated from the clutter,the true targets and the range false targets,i.e.,Zk=Zk,b∪Zk,e∪Zk,j∪Γk,whereZk,b,Zk,e,Zk,jandΓkrepresent the measurement RFS that originates from the newborn targets,the existing targets,the range false targets and the clutter,respectively.Generally,the measurements from range-falsetarget and newborn target cannot be directly distinguished,soZk,B=Zk,b∪Zk,jis used to represent the RFS of generalized newborn measurements.In addition,εis introduced to mark the attributes of the measurements,i.e.,

If only the existing target measurements are taken into consideration,the PHD recursion with the amplitude feature[14]will be


whereλandare the false alarm numbers before and after threshold detection,respectively[20].
Likewise,when only the generalized newborn target measurements are taken into consideration,the PHD recursion with the amplitude feature is


Therefore,the PHD of multitarget states is expressed as

In the following,we apply the decomposed form of the PHD filter to derive its SMC implementation to suppress the clutter and the false targets.
3.2 SMC implementation of existing target filter
In this section,signal amplitude information is introduced to the existing target filter to improve the discrimination performance of the measurement attributes.For timek−1(k>1),suppose thatandNk−1are the particle numbers of the potential new targets and the identified targets,respectively.andare the particle sets ofDk−1|k−1(x,1)andDk−1|k−1(x,0).Thus,Dk−1|k−1(x) =Dk−1|k−1(x,0)+Dk−1|k−1(x,1),which means if a potential new target at timek−1 still survives atk,it will be identified as an existing target.Thus,the particle sets can be given as


The prediction step for the existing targets in the PHD filter is obtained as

For the existing targets,the updating is given by


Therefore,the number of the existing targets can be given as

For the particle filters,the resampling process is performed to avoid particle degradation.The number of the resampled particlesNkcan be obtained as

whereηis the particle number allocated to each existing target,and[·]represents an rounding operation.Then the new particle setafter the resampling step can be obtained to approximate the current posterior PHDDk|k(x,0).
3.3 SMC implementation of generalized newborn target filter
Traditionally,in order to formγk|k−1(x),lots of particles are needed,and most particles may be eliminated in the resampling step.Therefore,the generalized newborn target is not treated in the same way as the existing target in this paper.Instead,the generalized newborn target particles are limited by the generalized newborn target measurement setZk,Bto such a region whereg(z|·),γk|k−1has non-zero values[25].This inherently means the new target must have been detected,so(S)=1.
Assume thatmk,Bis the number of the measurements inZk,B,and the known measurement(i=1,2,...,mk,B).Then the newborn target particles[25]can be generated by

whereMBis the particle number for each measurement,h(·)is the invertible measurement function,andJhis the Jacobian ofh−1(·).Eachis considered to be a measurement for a suspected newborn target.Then

where(x,1)is the PHD of{xk,i}and can be obtained by

If there is no MRFT jamming,Zk,B=Zk,b,the weights can be given as

The value ofMBmust be set empirically and circumstantially,so a balance factoris introduced[14]to adaptively adjust the newborn target particle weights according to the candidate newborn target measurement number,i.e.
In the presence of MRFT jamming,as mentioned in Section 2,the true target and the corresponding range false targets are approximated in the same direction.Thus,the grouping technique based on the angle test can be adopted to preliminarily determine the existence of range-falsetarget jamming.

whereis the test statistic,αis the significance level,and(2)represents a parameter of the chi-square test.If(37)is satisfied,thenandcan be classified into one group.This means that one or both of them are range-false-target measurements.Otherwise,the measurement should be used to form a new group.All measurements inZk,Btake the same test with each other.In this way,MRFT jamming can be preliminarily judged,and the measurements are grouped.The grouping is only for the generalized newborn target measurements,thus improving the computational efficiency compared with the existing methods in[1].
Assume that all generalized newborn target measurements are divided intoMgroups,somk,B≈M.There may be only one true target measurement in a group,and the rest are range-false-target measurements or the clutter measurements.Then JSEA information and amplitude information are used to identify the measurement in each group.In this paper,the multi-range-false targets are not directly distinguished,but gradually eliminated by modifying the particle weights of all generalized newborn targets in the filtering.For each measurement group,the amplitude weighted coefficientβa,iand the JSEA weighted coefficientβμ,i[32]can be obtain by

whereaiandμiare the amplitude and the JSEA of the measurement;is the average amplitude of the targets.c1andc2are constants with experienced valuesc1=0.5andc2=1.5,respectively.For a typical DRFM system[30],c3=3 andc4=10 when the number of samples is 32,and the number of bits is 3.
Consequently,the weights of the generalized newborn target particles in the presence of MRFT jamming can be modified as

When the sampling and weight assignment processes have been performed on all the measurements inZk,B,the weighted particle setsare achieved from the following union operation:
whereis the number of all the newborn target particles
4.A gating strategy for SMC-PHD filter
Combined with the measurement likelihood,an effective gating strategy based on the auxiliary information is introduced in this section to determine the attributes of the measurements in the presence of MRFT jamming in the dense clutter environment.Different from the existing antifalse-target jamming algorithms[1,2,10,11],the proposed method does not distinguish the true target measurements from the false target measurements directly.The method firstly divides the obtained measurements into two categories by source:the generalized newborn targets and the existing targets.Subsequently,the weights of the generalized newborn target particles are modified by using the target auxiliary information to suppress MRFT jamming and the clutter.
The candidate region can be obtained by the measurement model,the observation spaceZand the normalized innovation square.The radius of the regionrxis expressed by

wherex∈χ,

andΣrepresents the innovation covariance.
The pseudo-code of the proposed gating strategy for the SMC-PHD filter is presented in Algorithm 1.
Algorithm 1Gating strategy
XcandWcare the intermediate variable sets,and independent of the calculations.
SetZk,B=∅,Zk,e=∅,counterN=0 and group numberM=0.
Computerxusing(42).
For eachzk,c∈Zk,c=1,2,...,mkdo
SetXc=∅,Wc=∅

End for
The proposed gating strategy takes full advantage of the particle distinguishing features of distribution and the target auxiliary information.The measurements are firstly divided into the generalized newborn targets and the existing targets.The measurement associated with more than a certain number of particles will be classified as the existing target measurement.Note that all measurements are considered as newborn measurements fork=1.The weight thresholdγand the quantity thresholdTτhave an impact on the discrimination of the measurement attributes.IfTτandγare too large,it may lead to the misjudgment of the existing target as the generalized newborn target,resulting in a slight lag in the estimation of the number of targets.Conversely,smallTτandγmay lead to the misjudgment of the generalized newborn target as the existing target,resulting in the decrease of computational efficiency and correct recognition rate of MRFT.Based on the results from[14],a large number of simulations are carried out in this paper,and it is reasonable to set large values forTτandγto ensure the effectiveness of the algorithm.
The framework of the proposed algorithm is shown in Fig.2,and the main work is marked with dashed lines.Different from the existing association-based anti-jamming algorithms[1,10],the association can be completely avoided in the proposed RFS-based algorithm,thus significantly improving the computational efficiency.Moreover,the proposed algorithm deals with the existing targets and the generalized new targets separately by using different methods.In this way,almost all particles except the existing target particles are excluded during the updating process.Thus the filtering accuracy of the existing targets is improved,and the computational complexity is greatly reduced.
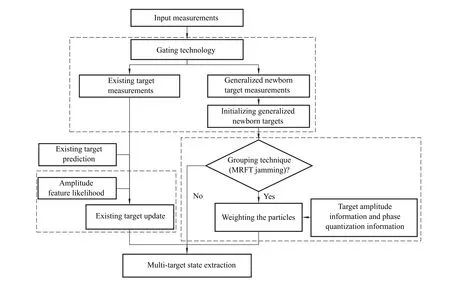
Fig.2 Algorithm framework of this paper
Traditionally,in the absence of any prior information,the target measurements and clutter false alarms are difficult to be distinguished.However,the proposed algorithm can greatly reduce the influence of the clutter measurements.Firstly,the gating strategy and the amplitude characteristic likelihood function are used to eliminate the interaction between the generalized newborn target and the existing target.The clutter alarms at the current moment are completely excluded during the updating for existing targets.Secondly,although the clutter alarms may be mis-taken for newborn targets,these particles will automatically be eliminated based on the newly obtained measurements and the auxiliary information of the target in the next iteration.Meanwhile,the grouping technique is used to classify the generalized newborn targets.The particle weights of the generalized newborn targets are modified by the amplitude and the phase quantization information to suppress the influence of MRFT jamming and the clutter.
It is noted that the proposed algorithm places the suppression of MRFT jamming in the filtering process,so the suppression of MRFT jamming and the clutter can be obtained at the same time.This is different from the conventional cancellation and tracking methods[1,2,3,10].In addition,the proposed algorithm does not change the basic structure of the PHD filter,and it can be easily applied to the latest RFS-based filter,but requires more computational cost than the standard form.
5.Simulation
The proposed algorithm is verified in terms of reliability, accuracy and computational efficiency. The simulations are designed in a two dimensional scenario in this paper. Compared with the three dimensional case, the two dimensional case may lead to the reduction of accuracy of the angle test, but make the proposed algorithm more persuasive in suppressing MRFT jamming.
5.1 Example 1
The reliability of the algorithm can be characterized by the correct recognition rate(CRR)of the false targets[1].The simulation scenario is defined as such a region[–2 000,2 000]×[–2 000,2 000]m2.The sensor is located at(0,0)m,and the standard deviations areσβ=0.1◦andσr=10 m.The detection probability of the targetpD=1.The clutter measurements are assumed to be uniformly distributed,and the mean number of the clutter alarms per scan after thresholding isr,r=10.For each expected target,MB=200 andη=200.The gating method parameters are conservatively set forTτ=20 andγ=10−4[14].The true trajectories are shown in Fig.3,where Δ and represent the starting point and the end point of each trajectory,respectively.The red color represents the targets using MRFT jamming and each true target has 10 false targets with 100 m intervals.
This simulation is aiming to identify and eliminate the false targets.Four methods are used for comparison purpose:only use of amplitude information(Method 1),only use of phase quantization information(Method 2),the multi-radar network identification method(Method3)used in[1],and the joint identification combined with the multilevel fuzzy comprehensive evaluation method(method 4)used in[10].Table 1 shows some essential parameters used in the simulation.

Fig.3 True trajectories of targets
Table 1 Essential parameters in the simulation
The comparison results are exhibited in Fig.4.The average CRR(a-CRR)of the five methods is given in Table 2.The proposed method based on amplitude and phase quantization information is better than Method 1 and Method 2 in terms of CRR.It is 16.6%on average higher than Method 1 and 54.1%on average higher than Method 2.The CRR increases with the increase of tracking steps because of the gradual reduction of the influence of the clutter.

Fig.4 Comparison of different methods

Table 2 The a-CRR comparison
In addition,when the tracking is stable(after four tracking steps),the result of Method 4 is the smoothest due to the complicated multi-level fuzzy comprehensive evaluation method.The CRR of the proposed algorithm is similar with(or even better than)Method 3 and Method 4.This is because the suppression of MRFT jamming and the clutter can be obtained at the same time in the proposed method which avoids measurement association.
The reliability can also be evaluated by considering the effect of the JSR.Fifty MC experiments are performed with JSR from0 dB to 10 dB.The result is shown in Fig.5.As expected,with the increase of JSR,the correct recognition rate of false targets is improved.This is in good agreement with the research results in[10,29].

Fig.5 CRR under different JSRs
5.2 Example 2
The estimation accuracy of the filter can be characterized by the optimal sub-pattern assignment(OSPA)metric[33].In this example,the order parameterp=2 and the cut off parameterc=500 are used[18].For the sake of comparison,the typical nonlinear tracking scenario in[34]is used.The region is assumed to be a semicircle with a radius of 2 000 m.A total of ten targets are generated from four different areas,and the coordinated-turn model[14]is used to describe the single target dynamic state.The true trajectories are shown in Fig.6.
The simulation duration is 100s and the sampling period is 1 s.MRFT jamming for all targets is 40–90s.The mean SNR of the target is 15 dB with=0.1 and the SNR of the true target signals varies from 10 dB to 30 dB.The other simulation parameters are the same as the previous.

Fig.6 Trajectories of true targets
In the case ofr=20,the black circle and the red line in Fig.7 represent the sensor measurement and the true trajectory,respectively.A large number of clutter measurements almost completely mask the true target information.

Fig.7 Measurements of range and bearing
The OSPA and the target number are shown in Fig.8 and Fig.9.The proposed method is used to deal with the MRFT jamming case.The measurement-driven adaptive PHD(MDA-PHD)method[14]is used to deal with the case without jamming.It can be found in Fig.8 that the OSPA shows a peak when a new target appears.This is because the filter needs to adapt to the change of the target number.The OSPA of the proposed method is almost the same as that of the MDA-PHD,or even smaller,regardless of the existence of MRFT jamming.This proves that the combined use of the target amplitude information and the phase quantization information can effectively suppress MRFT jamming and the clutter.

Fig.8 OSPA of different methods

Fig.9 Number of targets versus time
It can also be seen in Fig.9 that both methods underestimate the target number when there is no MRFT jamming.The proposed method overestimates slightly the target number when MRFT jamming exists.This is because MRFT jamming in this paper is gradually eliminated in the filtering process,rather than immediately.Overall,the proposed method is effective and accurate in dealing with MRFT jamming.
In the case of changingrfrom 0 to 50,more simulations are carried out.The JPDA method with the extended Kalman filter(EKF)in the presence of jamming[10]and the MDA-PHD in the absence of jamming[14]are chosen as benchmark algorithms.The JPDA is an associationbased method and generally used when the target number is known and fixed.In subsequent simulations,the JPDA method is applied to each simulation period with a known and fixed target number,and the elliptical tracking gate is also used.The gate probability is 0.99,the threshold of the tracking gate is 9.21,and the other parameters are the same as those in the other two algorithms.The average OSPA of 50 MC experiments are given in Fig.10.The timeaveraged OSPA of the JPDA is the smallest,because the other two algorithms have no prior knowledge of the target number.When the clutter rate is low,the performance of the MDA-PHD is better than the proposed method.

Fig.10 Time-averaged OSPA versus clutter rate
This is mainly because the MDA-PHD method does not consider the effect of MRFT jamming.With an increasing clutter rate,the proposed method has an obvious advantage over the MDA-PHD,especially whenr25.The mean OSPA of the proposed method is about 30%lower than the MDA-PHD.The advantage of the proposed algorithm in dealing with MRFT jamming and dense clutter is proved.
The average computing time of 50 MC runs withr=20 is given in Fig.11.In the absence of MRFT jamming,the computational efficiency of the proposed algorithm is almost no less than MDA-PHD,implying that the introduction of the amplitude feature likelihood does not significantly increase the computation complexity.This is because the amplitude feature likelihood is only used for the existing targets.When MRFT jamming exists,the computational complexity increases dramatically,and is positively correlated with the target number.
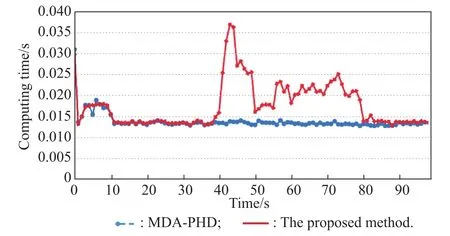
Fig.11 Computing time of different methods
Under the same simulation conditions,the average computing time over the whole simulation for different methods are given in Table 3.The computing time of the proposed method is almost the same as that of the MDA-PHD.Compared with the JPDA method,the computing time is reduced by 99.5%.Thus,the computational efficiency of the proposed method is verified.

Table 3 Comparison of computing time s
In sum,these results suggest that the proposed method has a good ability to deal with MRFT jamming in the dense clutter environment with a high computational efficiency.
6.Conclusions
This paper considers the problem of MTT in the presence of MRFT jamming in the dense clutter environment.An efficient MTT algorithm based on the SMC-PHD filter is proposed.The obtained measurements are firstly divided into two categories based on the gating strategy.The measurements of the generalized newborn target and the existing target are independently used in the decomposed form of the SMC-PHD filter.The measurements grouping technique and the target auxiliary information are incorporated into the SMC-PHD filter to deal with MRFT jamming and the clutter by modifying the weight of particles of generalized newborn targets.Simulations have proved its advantages in dealing with MRFT jamming in the dense clutter environment.The identification reliability of false targets is almost the same as(or even better than) that of the multiradar networking method and that of the joint identification combined with the multi-level fuzzy comprehensive evaluation method. The accuracy is obviously better than that of the MDA-PHD method when the clutter rate is high.The computational efficiency is much higher than that of the existing association-based JPDA method.Meanwhile,the proposed method can be applied to a more realistic scenario compared with the existing JPDA method.
杂志排行

Journal of Systems Engineering and Electronics的其它文章
- Design,analysis and optimization of random access inter-satellite ranging system
- Parity recognition of blade number and manoeuvre intention classificatio algorithm of rotor target based on micro-Doppler features using CNN
- Uplink NOMA signal transmission with convolutional neural networks approach
- A transceiver frequency conversion module based on 3D micropackaging technology
- Renormalization:single-photon processes of two-level system in free space
- Adaptive resource management for multi-target tracking in co-located MIMO radar based on time-space joint allocation