磁电弹结构多场耦合分析的稳定Node-based 光滑径向基点插值法
2020-10-31任书慧孟广伟王吉贤周立明
任书慧,孟广伟,王吉贤,周立明
(吉林大学机械与航空航天工程学院,吉林长春 130025)
磁电弹材料是一种由压电相(BaTiO3)与压磁相(CoFe2O4)复合而成的智能材料,能够将机械能、电能与磁能相互转化[1-2].磁电弹材料因其具有力电、力磁、磁电效应而被广泛应用于智能结构中,引起了国内外学者的广泛关注[3-4].Jiang 等[5]推导了在均布载荷作用下磁电弹悬臂梁响应的解析解,为未来磁电弹结构的设计与分析奠定了基础.Wang 等[6]求解了三维磁电弹圆柱板的自由振动问题,得出了频率方程.Ebrahimi 等[7-8]利用Hamilton 原理推导了磁电弹纳米板的非局部控制方程,研究了纳米板的屈曲行为.
由于传统有限元法(FEM)在求解中存在“过刚”、体积自锁等问题,导致结果不准确.近年来,Liu等[9]提出了广义梯度光滑技术,并基于该方法构造出了一系列光滑有限元法(S-FEM)[10]和光滑径向基点插值法(S-RPIM)[11].何智成等[12-13]和陈泽聪等[14]将光滑有限元应用到声学模拟中.周立明等[15-16]将光滑有限元扩展到了求解裂纹问题和多场耦合问题中,验证了光滑方法的准确性.在S-RPIM 中,Node-based光滑径向基点插值法(NS-RPIM)能够消除FEM 中“过刚”的问题,为所求解问题提供能量范数的上界解[9].该方法使用径向基函数对场函数进行近似,其形函数具有Kronecker Delta 函数属性,边界条件可以如FEM 一样直接施加.基于伽辽金弱形式与节点积分技术,推导出系统方程.基于这些优点,NS-RPIM在求解静力学以及多场耦合问题中得到了广泛的应用.Li 等[17]采用NS-RPIM 分析了二维、三维固体力学问题,验证了此算法的准确性与优越性.Zhou 等[18]将NS-RPIM 引入多场耦合问题的研究中,结果表明,NS-RPIM 对于求解磁电弹结构的响应问题是有效且可靠的.
尽管NS-RPIM 在求解许多问题时表现良好,但研究表明[11,19],由于NS-RPIM 的模型过于柔软,会令其在求解动态问题时产生伪非零能量模式,导致算法存在时间不稳定性.为增强系统刚度,解决时间不稳定性,Wang 等[20]提出了一种稳定算法,解决了Node-based 光滑有限元方法中的缺陷并且减少了求解声学问题中的色散误差.Feng 等[21]提出了一种稳定的节点积分方法,分析了电磁问题.Yang 等[22]解决了Node-based 光滑有限元方法中的时间不稳定性,更准确的求解了金属成型问题.
本文提出了稳定NS-RPIM(SNS-RPIM),基于传统NS-RPIM 方法,引入与场变量梯度方差相关的稳定项,消除了不确定参数,推导了求解多场耦合问题的SNS-RPIM 方程,分析了磁电弹结构在静力作用下的响应,并将所得结果与有限元法计算结果进行了对比.
1 基本方程
磁电弹材料平衡方程如下:

式中:σij、Dl、Bl分别为应力分量、电位移分量、磁感应强度分量.
磁电弹材料的几何方程如下:

式中:Sij为应变分量;Ek为电场强度分量;Hk为磁场强度分量;Φ 与Ψ 为电势与磁势.
磁电弹材料的本构方程如下:

式中:Cij、eki、qki分别为弹性常数、压电系数与压磁系数;εlk、mlk、μlk分别为介电常数、磁电耦合系数与磁导率.i,j=1,2,…,6;l=1,2,3;k=1,2,3.
边界条件为:

式中:Γd与Γs分别为位移边界与力边界;Γe与Γt分别为电势边界与电位移边界;Γm与Γi分别为磁势边界与磁通量边界为Γd上给定的位移为Γe上给定的面力为Γe上给定的电势为Γt上给定的电位移;为Γm上给定的磁势为Γi上给定的磁通量.
2 稳定Node-based 光滑径向基点插值法
2.1 Cell-based T2L 方案
Cell-based T2L 方案[9]为计算xQ的形函数值选择合适的局部支持节点.该方案选择xQ周围的两层节点作为局部支持节点.第一层节点为xQ所在三角形单元的顶点;第二层节点为与第一层节点直接连接的那些节点,如图1 所示.
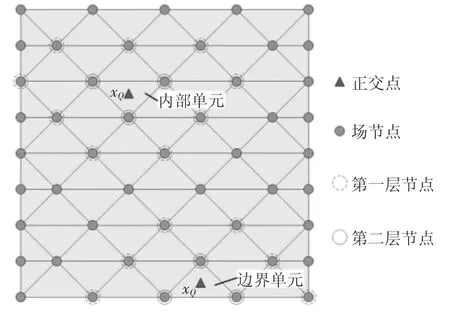
图1 Cell-based T2L 方案Fig.1 Cell-based T2L scheme
2.2 Node-based 光滑径向基点插值法
二维问题域Ω 被离散为ne个三角形单元,包含nn个节点.通过将节点xi=[xi,zi]T周围三角形的边中点与质心依次相连,构造以xi为中心的光滑域Ωi,如图2 所示.
问题域内任一点xi处的近似位移、近似电势与近似磁势可表示为:

式中:Nu(xi)、NΦ(xi)与NΨ(xi)分别为NS-RPIM 的位移形函数、电势形函数与磁势形函数;ns为局部支持节点的数量;u、Φ 和Ψ 分别表示位移向量、电势向量和磁势向量.
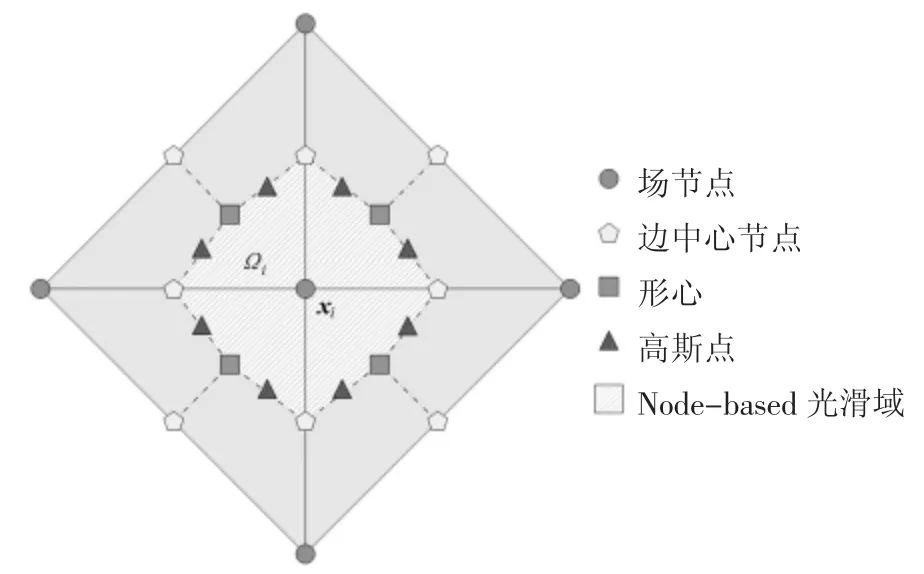
图2 基于节点xi 的光滑域Fig.2 Smoothing domain of node xi
通过引入梯度光滑技术,根据式(16)~(18),节点xi处的光滑应变、光滑电场强度与光滑磁场强度分别为:

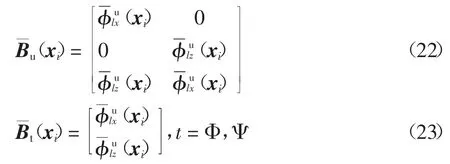
通过引入标准高斯积分,式(22)(23)中的各项可表示为:
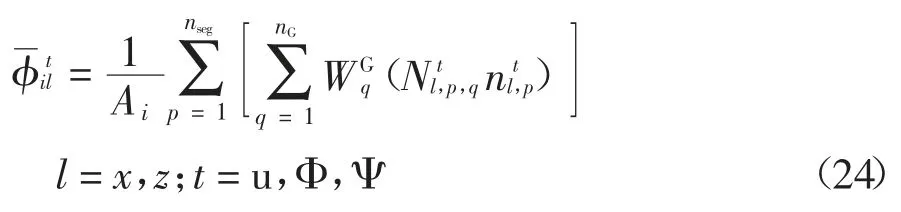
式中:nG为高斯点的数量;nseg为光滑域边界的数量;为光滑域第p 段边界中单位法向量矩阵的分量;为第p 段边界上第q 个高斯点处的形函数值;为第q 个高斯点处的权值;Ai为光滑域的面积.
二维磁电弹的NS-RPIM 静力学方程可表示为:
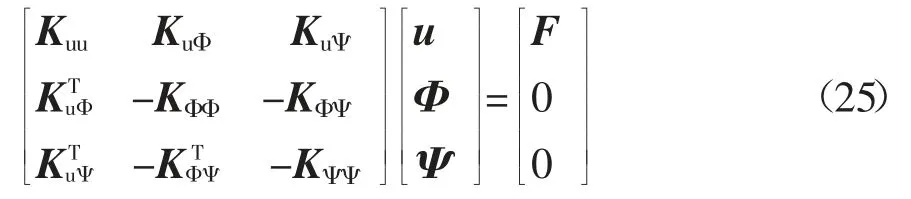
式中:F 为外力.各刚度矩阵为:
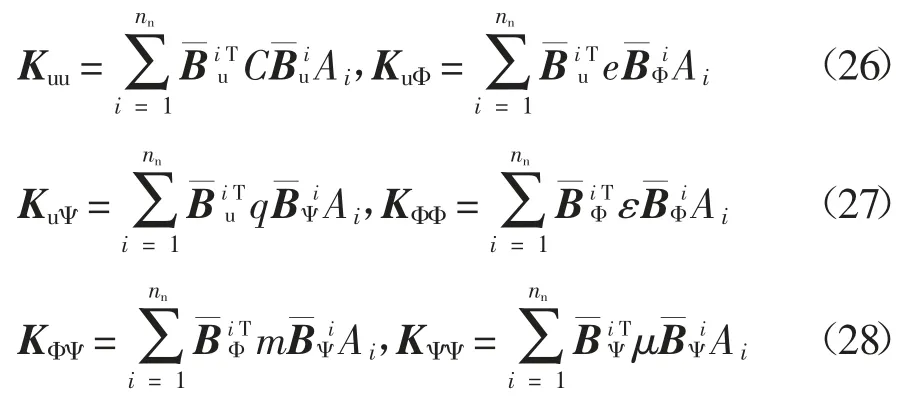
采用自由度凝聚技术[18],式(25)可表示为:

式中:等效力向量Feq、等效刚度矩阵Keq以及电势Φ和磁势Ψ 的求解公式见参考文献[18].
2.3 稳定Node-based 光滑径向基点插值法
为了在提高NS-RPIM 计算精度的同时消除时间不稳定性,在该算法中引入与场变量梯度方差相关的稳定项来提高模型的刚度,令其更接近真实情况.
以二维问题为例,如图3 所示,光滑域Ωi被近似为具有相同面积的圆,将近似域进一步划分为4个子光滑域.局部坐标系与光滑域的交点1,2,3,4;i=1,2,3,…,nn)作为补充积分点,nn为结构包含节点数.积分点与节点xi之间的距离lc相等,大小为近似域的半径.lc的计算公式为:

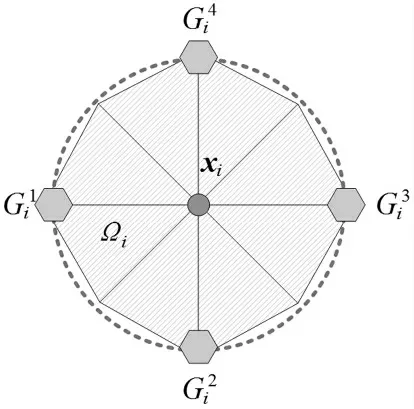
图3 SNS-RPIM 积分区域Fig.3 Integral domain of SNS-RPIM
假设场变量的梯度在光滑域Ωi中连续且一阶可导,其在4 个积分点处的泰勒展开式分别为:
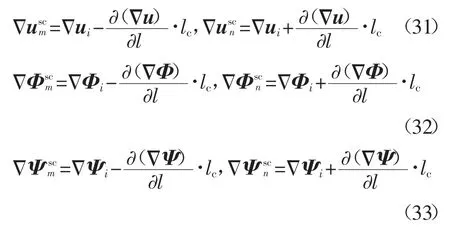
式中:m=1,2;n=3,4;l=x,z;上标sc 表示在近似域中的4 个补充积分点处进行计算.将式(31)~式(33)代入光滑伽辽金弱形式,式(25)中各刚度矩阵可以改写为:

3 数值算例
3.1 算例1
磁电弹材料(BaTiO3-CoFe2O4)板在边AD 受100 N/m2的均布载荷作用,为平面应变问题,如图4 所示,边长a=2.0 m.表1 给出了磁电弹板的材料参数,质量密度为5 730 kg/m3,边界条件为:ux=0(边CD),uz=Ф=Ψ=0(边BC),每个边界的表面电荷与表面磁感应强度均为零.
采用不同节点数量(121、441 和1 681 个)求解磁电弹板的广义位移(位移ux、uz,电势Φ,磁势Ψ),验证SNS-RPIM 的正确性以及收敛性.表2 给出了文献[23]中A 点处位移、电势与磁势的解析解,以及SNS-RPIM 在不同节点数量下的计算结果.可见,SNS-RPIM 的结果与解析解误差很小,随着节点数量的增加,误差减小,验证了SNS-RPIM 求解磁电弹结构多场耦合问题的正确性、有效性.
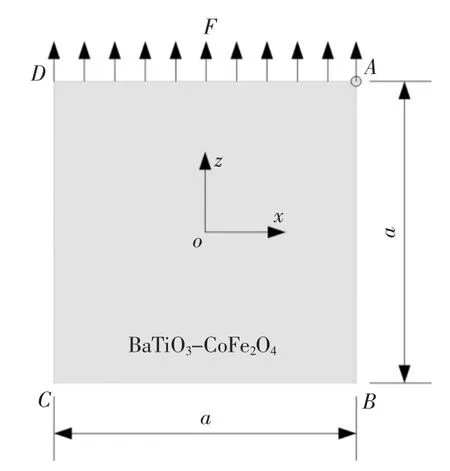
图4 磁电弹板Fig.4 Magneto-electro-elastic plate
3.2 算例2
磁电弹材料悬臂梁如图5 所示,长度L=0.030 m,宽度h=0.002 m,在B 点承受200 N 的静力,为平面应力问题.悬臂梁在固定端处满足ux=uz=Φ=Ψ=0.悬臂梁材料属性见表1,质量密度为5 730 kg/m3.

图5 磁电弹悬臂梁Fig.5 Magneto-electro-elastic cantilever beam
在证明了SNS-RPIM 正确性的基础上,对磁电弹悬臂梁在静力作用下的响应进行研究.图6 给出了边AB 处的广义位移,SNS-RPIM 与FEM 采用三角形单元,节点数量为305 个.其中,参考解为FEM采用180×12 个四边形单元的结果.图7 给出了静力作用下悬臂梁的云图.由结果可知,在所用节点数量相同的情况下,SNS-RPIM 的计算结果比FEM 的结果更加接近参考解.算例结果验证了SNS-RPIM 的高精度、正确性和有效性.
在节点数为305、637 和1 089 个时,对比了SNS-RPIM 与FEM 的能量误差[24],如图8 所示.可知在节点数相同的情况下,SNS-RPIM 的能量误差远远低于FEM,并且随着所用节点数的增加,能量误差逐渐降低.从而进一步验证了SNS-RPIM 的精确性,高收敛性与有效性.

图6 悬臂梁AB 边界处ux、uz,Φ 和Ψ 变化趋势Fig.6 Variation of ux、uz,Φ and Ψ at edge AB of cantilever beam

图7 悬臂梁μx、μz、Φ 和Ψ 云图Fig.7 Contour of μx、μz、Φ and Ψ of cantilever beam

图8 稳定Node-based 光滑径向基点插值法与有限元法在不同节点数下的能量误差Fig.8 Energy error of SNS-RPIM and FEM with different number of nodes
3.3 算例3
磁电弹材料传感器为对称结构,在A 点受100 N 的静力F,传感器几何形状及尺寸如图9 所示,为平面应力问题.传感器边界条件为:ux=uz=0 (左右固定端处),Ф=Ψ=0(下边界处).结构所用材料见表1,质量密度为5 730 kg/m3.
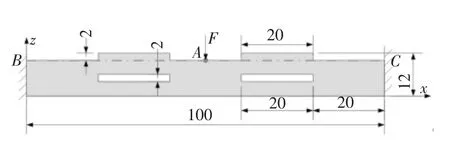
图9 磁电弹传感器(单位:mm)Fig.9 Magneto-electro-elastic sensor(unit:mm)
图10 给出了边BC 处的广义位移,SNS-RPIM与FEM 采用三角形单元,节点数量为1 157 个.其中,参考解为FEM 采用4 000 个四边形单元的结果.图11 所示为磁电弹传感器位移、电势和磁势的云图.由图可得:在同样节点条件下,SNS-RPIM 的计算结果比FEM 的计算结果更加接近参考解,从而验证了SNS-RPIM 可解决有限元系统刚度过硬的问题,提高结果的精度,能够有效求解复杂磁电弹结构在静力作用下的响应.


图10 传感器BC 边界处ux、uz、Φ 和Ψ 变化趋势Fig.10 Variation of ux、uz、Φ and Ψ at edge BC of magneto-electro-elastic sensor

图11 传感器μx、μz、Φ 和Ψ 云图Fig.11 Contour of μx、μz、Φ and Ψ of magneto-electro-elastic sensor
4 结论
本文基于场变量梯度方差构造了稳定项,并将其引入了传统Node-based 光滑径向基点插值法,提出了稳定Node-based 光滑径向基点插值法.随后求解了磁电弹结构在静力作用下的响应,得出以下结论:
1)将SNS-RPIM 的结果与解析解进行对比,二者吻合良好,说明了本方法的正确性及有效性.
2)计算了SNS-RPIM 与FEM 在不同节点数量下的能量误差,结果显示SNS-RPIM 具有良好的收敛性与准确性.
3)SNS-RPIM 利用较少的节点能够达到更高的精度,消除了FEM 模型刚度过硬的问题.
4)通过考虑SNS-RPIM 与FEM 对不同模型的求解结果,表明SNS-RPIM 在求解磁电弹结构多场耦合问题时的可靠性和适用性.
