全自动运行轨道交通系统列车智能环境感知技术的应用
2020-10-30陈艳鑫
杨 硕 陈艳鑫
(1.苏州轨道交通市域一号线有限公司 江苏 苏州 215000;2.苏州轨道交通有限公司运营一分公司 江苏 苏州 215000)
0 概述
截止2019年底,我国已有40个城市开通城市轨道交通线路,运营里程长达6 730 km,现在每1~2年就增长1 000 km,有更多的城市在建新线,我国已步入了城轨交通大国的行列。随着自动化、智能化技术的发展,全自动运行系统成为了轨道交通行业的热点,对列车的技术发展给出了新的方向。
1 探测技术的选择
为使列车能够智能感知运行环境,探测设备是信息的来源。在一定范围内识别物体(障碍物)的技术有很多,例如:视频识别、红外成像识别、雷达识别、超声波识别、激光测距等等,针对不同使用环境,这些技术各有优势。
在轨道交通环境特点下,考虑到探测手段的相辅相成,系统采用可见光与红外探测的组合模式。
2 系统设计
2.1 功能需求
本系统主要通过探测技术发现影响列车安全运行的因素,通过智能软件算法智能感知行车环境,主要实现识别前方障碍物功能和识别车门与站台门二门异物的功能,系统可通过与列车TCMS系统的通信,根据运用场景向控制中心报警提示,同时将相关视频图像储存并推送至控制中心,供控制中心远程查阅现场图像[1-2]。
2.1.1前方障碍物探测功能
为了确保列车行驶安全,通过可见光摄像机与红外摄像机的配合使用,不断地对行驶线路区间进人、施工遗留物以及广告牌、树木、彩钢板等前方限界内的障碍进行探测,并在监控的基础上不断对限界外的行驶环境做评估,当某些指标超出预先确定的安全范围,则按定义好的威胁等级采取相应的措施并报警提示。
2.1.2车门与站台门间异物探测功能
本功能是通过半球高清摄像机,采用ROI区域识别技术,由计算机自动识别出二门之间的异物并报警提示,从而避免在夹到异物的情况下列车依然开车。
2.1.3其他功能
(1)视频增强功能:列车在运行中会通过各种复杂的环境,对列车的驾驶会造成一定的影响,通过软件算法消除影响驾驶的不利因素,如除雾霾、抗强光、低照度提亮等,辅助列车的全自动运行。
(2)视频记录功能:在整个列车行驶过程中,记录所有的视频信息,能够为事故/问题的追溯提供原始数据。
(3)远程通信功能:通过车地无线通道,将系统内所有摄像机视频信息传输到OCC工作站,当某个列车发现有障碍物后,OCC工作站自动切换到发现障碍物的这一路,全屏显示,并发出报警提示。
(4)电源中断保护功能:根据EN 50155标准要求,当电源中断10 ms时不影响正常运行的能力。计算机模块在识别电源故障1 ms后就通告CPU,以便采取可能的自保护措施。
(5)通电自检功能:系统具备通电自检的能力,并可将自检结果向列车TCMS系统汇报。
2.2 系统构架
根据以上的功能需求,按6B编组的列车提出系统的构架,如图1所示。两端的TC车各安装一个视频处理服务器,用于数据的分析、计算和处理,2个主机热备冗余,2个视频处理服务器通过RS485协议与TCMS通讯。本系统内部通过以太网交换机自组环网。视频处理服务器和车载车地通信设备互联,达到与OCC通信的功能。
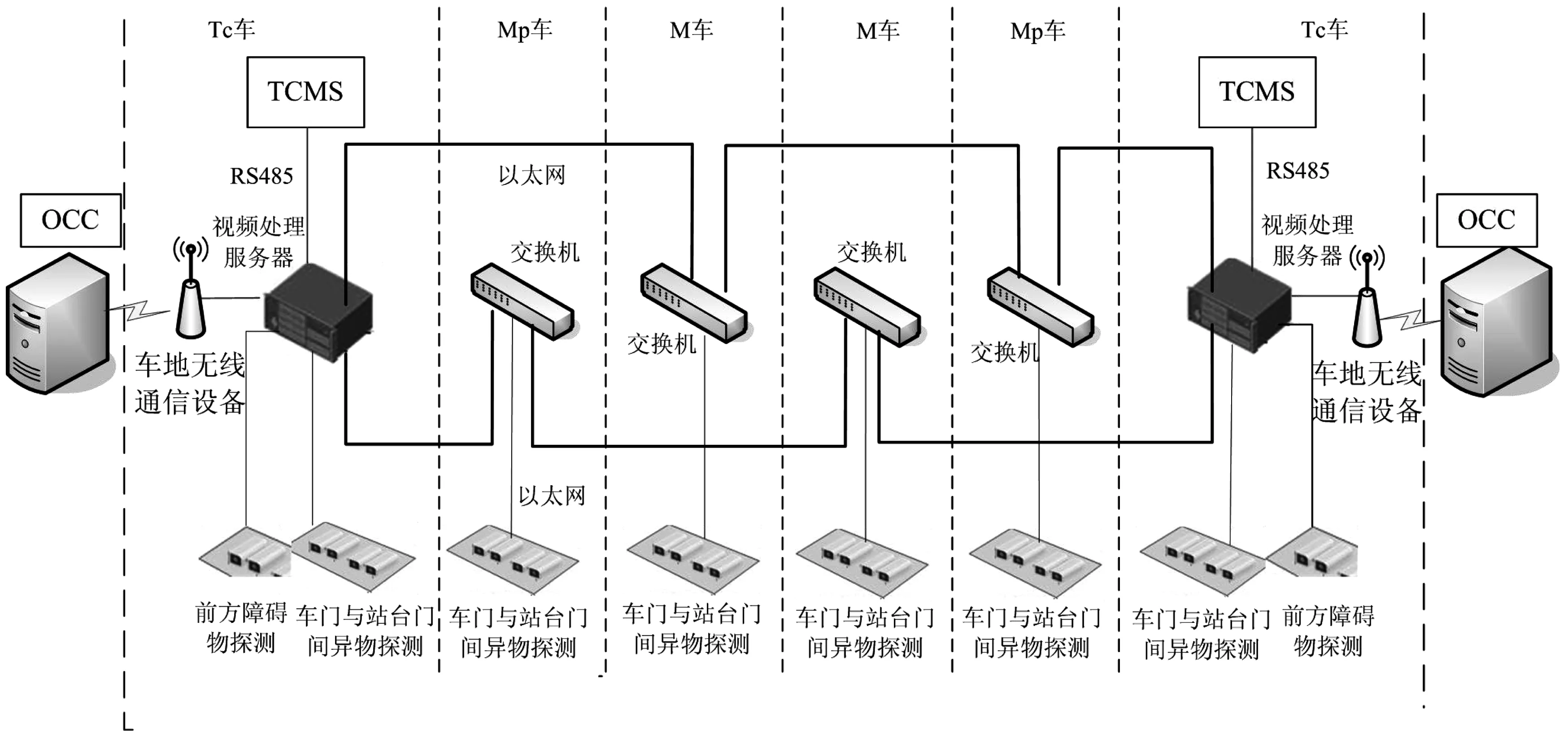
图1 系统构架图
两端司机室各安装1台数字高清摄像机和1台红外高清摄像机,用以实现前方障碍物探测功能。
每节车厢两侧居中位置各安装2个高清半球摄像机,实现2个方向内最近2个车门与站台门之间区域的异物探测功能。
2.3 前方障碍物探测功能的实现规则
2.3.1异常情况的威胁等级分类
列车障碍物探测是安全行车的保障,系统的误报率和漏报率是关键的性能指标,同时以动态包络线为核心的限界判断与实际应用也有一定的差异[3]。为解决“非黑即白”的单一判断方式,本系统通过将障碍物的判断由限界内扩展到全区域(限界内及比邻区间),比对人工驾驶车辆的处置方法,力图设定更多的障碍物报警级别,达到多级判断模式,增加流程的可操作性。根据对行车安全威胁的程度,将前方障碍物和两侧障碍物对行驶造成的威胁分为:确定威胁、或许威胁和环境威胁三种级别。
(1)确定威胁(A级)
本级别的威胁会造成列车较大的碰撞,使得列车的运行无法继续,严重时可能造成列车倾覆。此类威胁都在列车行驶的限界内,或者在限界内有很大的体积(面积)占比。
本级别能识别的下限为:直线距离250 m,在限界内的可视尺寸为150 mm×150 mm×150 mm。
根据识别程度的不同分为A1、A2、A3三种。
A1:指前方的车辆探测。前方探测距离:直线250 m,弯道以可视频直线最大距离为准。识别的确认度在95%以上。
A2:指站台间隙异物探测。探测范围:列车侧面所有列车门的区域。识别的确认度在95%以上。
A3:列车前方限界内所有影响列车行驶的障碍物。探测距离:直线250 m,弯道以可视频直线最大距离为准。当识别的确认度在80%以下,采取“减速到40 km/h再查看”的模式。
(2)或许威胁(B级)
对列车的行驶或许会造成一定的损失,但列车可以通过。此类威胁一般跨列车行驶的限界,或者在限界内体积(面积)比较小的物体。
本级别识别范围为限界内和跨限界、物体尺寸不足“A级”的情况。
根据识别程度的不同分为B1、B2、B3三种。
B1:合同中指定的情况,可设置。
B2:列车清障器清除范围内的物体属于本级别。
B3:不属于A1、A2、A3、B1、B2级别的障碍物都属于本级别。
(3)环境威胁(C级)
对列车的行驶不会造成直接损失,但可能会演变成B类以上的威胁。此类威胁一般在列车行驶的限界外。本级别识别范围为限界外。
根据异物位置的不同分为C1、C2、C3三种。
C1:车站环境威胁,例如屏蔽门下的踏空胶条丢失、轨道旁有乘客遗留物等。
C2:高架环境威胁,例如广告牌、树木向轨道方向歪倒,接触网上方有风筝、塑料袋等。
C3:隧道环境威胁,例如限界外有前一天检修遗留的工具等、限界外有大面积的变化(线缆变化、积水)。
2.3.2应对措施建议处理流程
根据发现障碍物等级的不同,相应的应对措施也有所区别,综合考虑如下:
A1:直接报警,等待故障排除;
A2:直接报警,等待故障排除;
A3:控制列车减速,持续探测并推送画面,近距离下人工(OCC或司机)确认后慢速通过;
B1~B3:控制列车减速通过,记录并上报;
C1~C3:记录并上报。
2.3.3人工判断时间的验算
当发现障碍物后,列车采取减速查看的措施(见图2)。

图2 减速查看措施
为了让OCC/司机有时间处理障碍物判断任务,并在需要时可将列车在障碍物前制动停车,需计算在不同速度下列车制动至40 km/h的时间和40 km/h制动至静止的时间,再结合本系统的有效探测距离,即可以得到40 km/h下用于人工判断的可持续时间(见表1)。
根据表2可以得出:在80 km/h的时速下,减速时间有9.26 s,在40 km/h时滑行判断时间为3.98 s,满足正常的判断需要。其他速度下判断时间均多于80 km/h的判断时间,所以可以满足所有速度下的判断时间需求。

表1 人工判断的可持续时间
2.3.4弯道可视距离与车速
在隧道中的弯道处,列车的视野会受到遮挡,根据不同的转弯半径,可视距离有所不同。可视距离的具体计算公式为:L2+(R-d)2=R2。其中L为可视距离的一半,R为隧道转弯半径,d为隧道直径。
选取拐弯半径的典型值300 m、800 m、1 200 m和2 000 m,再结合上述制动判断计算公式,得出以下结果(见表2)。
在转弯半径2 000 m直至直线,系统能够支持80 km/h的时速;在转弯半径1 200 m~2 000 m,系统能够支持70 km/h的时速;在转弯半径800 m~1 200 m,系统能够支持50 km/h的时速;在转弯半径300 m~800 m,系统能够支持40 km/h的时速。
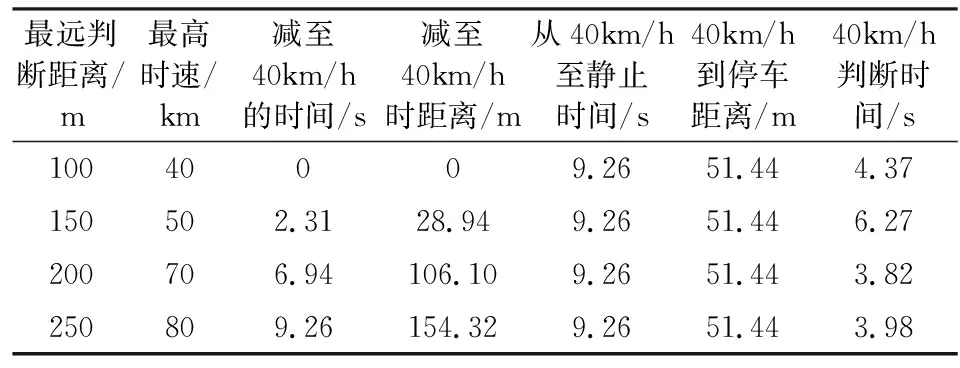
表2 指定可视距离下刹车距离与时间的计算
2.4 车门与站台门间异物探测功能实现规则
(1)列车进站停车后,车侧摄像机开始工作,启动检测。
(2)列车TCMS发送开启左侧/右侧车门指令,系统拍摄相应侧的视频前图(开门截图)。
(3)列车TCMS发送关闭左侧/右侧车门指令,在车门实际关闭后,系统拍摄相应侧的视频后图(关门截图)。
(4)系统依据视频前图(开门截图)和后图(关门截图),通过图像识别算法比较有无障碍物。
(5)若有障碍物存在,则向OCC报警,同时将报警区域视频信息推送给OCC查阅,避免发车。
3 技术探讨
3.1 物体识别的精度
视频识别是以可见光识别物体作为根本方式,其中能够识别物体大小与距离是重要问题[4]。目前能做到列车前方20~250 m的动态包络线范围内障碍物的识别,在250 m处,识别物体的下限尺寸为150 mm×150 mm×150 mm,本系统对目标物体的材质还不能做出判断。随着技术的发展及实际运用中遇到的案例数据的填充,系统将可识别更多种、更细节的异常情况。
3.2 抗振动解决方案
(1)通过寻找视频中的参照点,以此为基点来判断。考虑到除了上下振动,还可能出现左右扭动,所以参照点需要2个。
(2)列车行进过程中,所有的包络线都是以钢轨作为参照点的。所以以钢轨作为参照点,可以改善行进列车振动造成的影响。
(3)通过视频除抖算法,还原出平滑的视频。
3.3 可见光视频与红外视频的配合使用
(1)当光线与能见度很好时采用可见光摄像机为主、红外摄像机为辅的模式,红外摄像机进行视频增强处理。基本不影响原来的识别准确度。
(2)当有雾霾(高架场景)、亮度不足(隧道低照度场景)时,自动切换到红外摄像机为主、可见光为辅的模式,可见光进行视频增强处理。在极端情况下识别的准确度大幅提高。
3.4 系统的可靠性
作为主动检测类技术,系统的误报率、漏报率是客观存在的,如何提高系统的可信度,应该是继续努力的方向,当可信度足够高的时候,系统可自动对列车进行控制,保障安全行车,系统对列车自动运行的意义将大幅提升。
4 结束语
针对全自动驾驶列车的使用环境特点,分析对比了现有的几种探测技术,选择了可视光摄像机与红外摄像机配合作为识别手段,预想了列车运行中可能遇见的主要异物侵限环境,基于异常的位置、类型及威胁程度等因素,提出了一种列车智能环境感知系统,可以及时发现侵限异物并向OCC报警。通过在部分城市的装车试验验证,本系统运行状态良好,可为列车识别运行环境内的侵限异物等风险因素,达到了预想的效果。
