塔式起重机防碰撞监控系统研究
2020-10-30
(西安建筑科技大学 机电工程学院,陕西 西安 710055)
建筑施工中,交叉作业的塔机相互之间缺少联系和制约,仅靠信号工指引,无法有效避免塔机与塔机、塔机与障碍物的碰撞问题。本文开发的塔机防碰撞监控系统,旨在解决此类问题。
1 系统构成
塔机防碰撞监控系统总体框架(图1、图2)包括:数据采集模块、运算处理模块、用户界面、软件部分(包括短距离无线网络传输、防碰撞算法和线程管理等环节)。
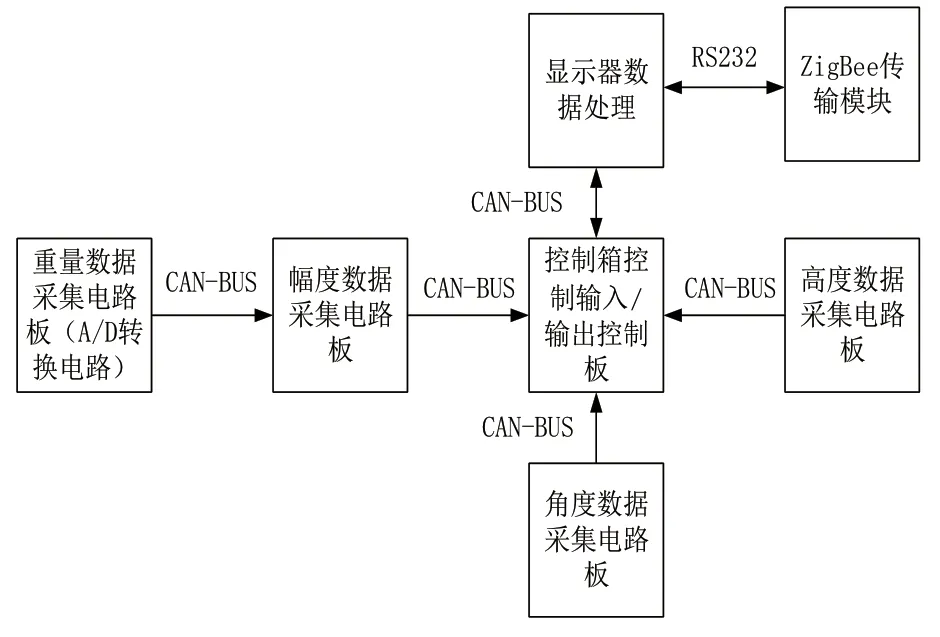
图1 监控系统结构框图
国内塔机监控系统在硬件方面主要采用相关的编码器或传感器来检测塔机运行状态,然后通过软件进行优化。主要涉及传感器测量精度和运算方法研究两方面的问题。
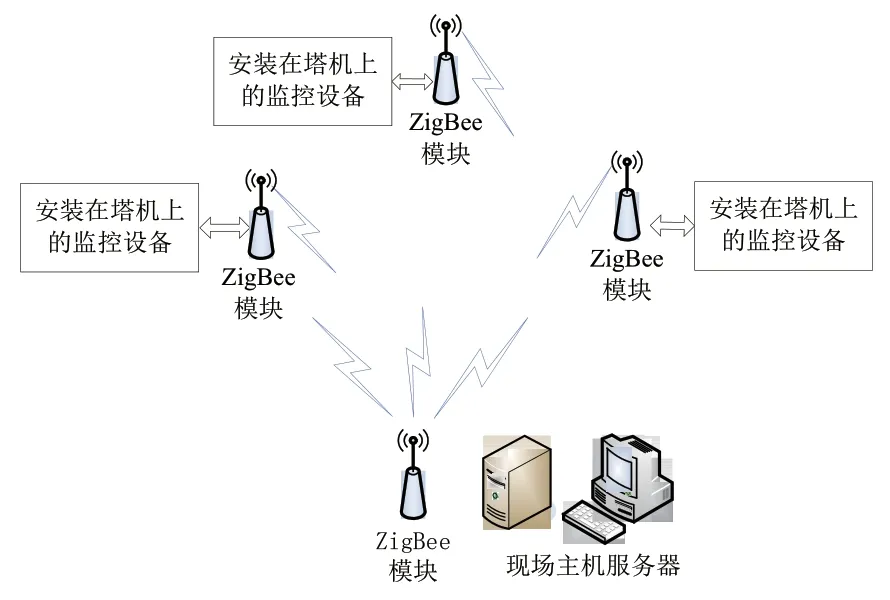
图2 监控系统示意图
2 系统硬件设计
2.1 控制箱
控制箱负责整套系统的供电、将数据传送给显示器并将控制指令传送给塔机的控制系统。控制箱采用总线结构设计,由一个CAN 通讯连接板(图3)和一块24 路输出的继电器板(图4)组成,接受主控制板的调度。控制箱通过继电器控制接触器来控制各电机的运转。
图3 CAN转换电路板元件代号丝印图
图4 继电器板元件代号丝印图
本研究对控制箱的功能设计可以控制变频器的输出接口;各传感器及显示器分别通过5 根4芯双绞屏蔽线连接,控制箱配备2 根24 芯信号输出线与塔机控制继电器相连接(图5)。
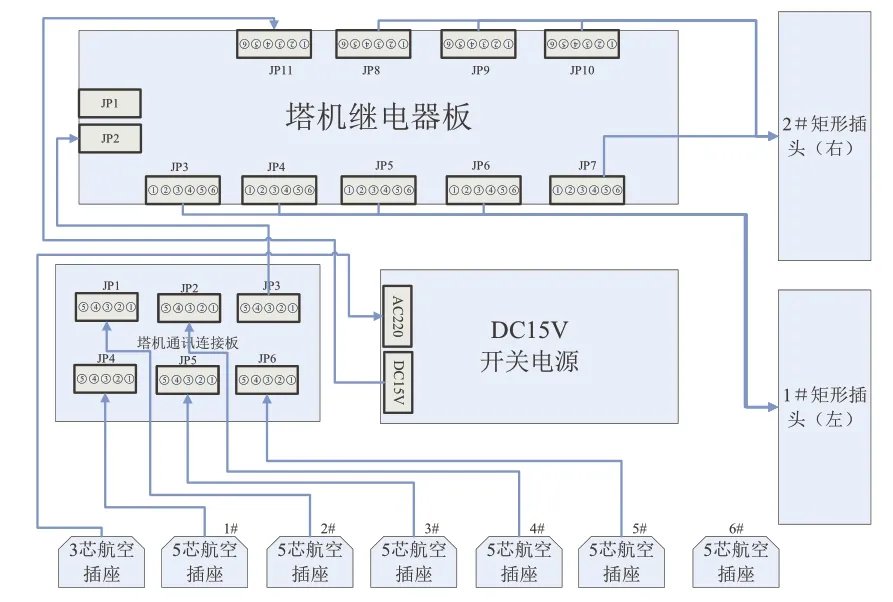
图5 控制箱接线图
塔机控制箱的测试程序采用ProD05011DV3.0_TestV1.0.mhx,测试电源采用交流AC15V 电源、直流DC24V 开关电源。控制箱测试通过。
2.2 传感器
传感器类型有高度传感器、幅度传感器、回转角度传感器、重量传感器。
高度、幅度传感器共用一块Hall传感器板(图6),分别安装在多功能限制器上,与卷筒同轴转动。通过拨码开关和软件设置不同的地址来区分高度数据和幅度数据。
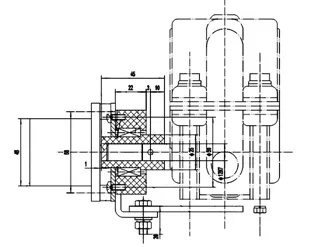
图6 位移传感器
在试验和测试过程中,角度传感器采集角度无法与软件建立的坐标系对应,因此对角度传感器安装支架进行改装。
重量传感器如图7 所示。
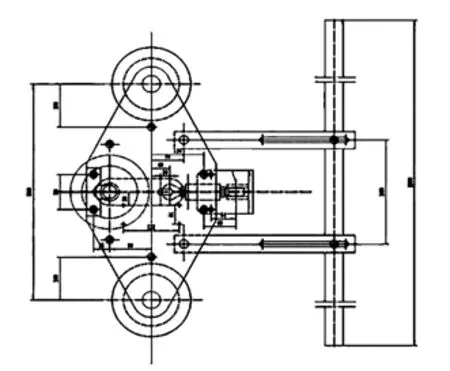
图7 重量传感器
采用ProD05011EV4.0_TestV1.0.mhx 的测试程序和直流DC15V 开关电源对传感器进行测试。
3 系统软件设计
3.1 短距离无线传输网络的研究
群塔防碰撞现场的PC 控制主机到终端从机的距离大于100m,满足系统现场要求的有ZigBee 技术和433MHz 技术。433MHz 技术数据传输速率低、只支持星型网络拓扑结构,可靠性和稳定性较差。因此选ZigBee 模块作为无线传输模块(图8)。
陶氏消费品解决方案全球商务总裁Mauro Gregorio表示:“随着全球范围人们生活水平的稳步提升和中产阶层规模的不断壮大,高端消费品的市场需求节节攀升,新兴市场尤为如此。我们在运营的每一个环节都竭力遵循以客户为中心的理念,投资兴建新的有机硅树脂工厂便是这一承诺的生动注脚。我们相信,陶氏将凭借更加强大的生产能力更好地满足客户需求,打造极致的客户体验。”

图8 ZigBee传输模块
为提高系统效率,本系统采用透明数据传输方式。数据协议接收数据后进行数据校验处理以保证数据的准确性。在无线通讯网络搭设过程中将节点设置成中继路由,组成一个多跳网络,增加整个网络的数据传输距离,满足现场使用要求。
3.2 防碰撞运算方法
选择塔机架设平面为XOY平面,塔机架设方向为Z轴方向,建立三维直角坐标系。选择塔机群内一台塔机作为参考塔机,同时定义为坐标原点(0,0,0),将塔机的大臂长度、平衡臂长度、塔机高度等基本参数和位置坐标通过可视化的参数界面录入系统建立三维模型。测量区域内其它塔机与参考塔机的平面位置关系。
通过计算2 台塔机中心点之间的距离与两设备大臂长度的关系,确定2 台塔机是否存在干涉作业问题,存在干涉的2 塔机在XOY平面上投影的交叉区域即为干涉区域。
本文将塔机结构简化成空间线段,通过计算最小距离即可计算结构是否处于安全距离。设空间线段AB的A点坐标为(x1,y1,z1),B点为(x2,y2,z2),空间线段CD的C点坐标为(x3,y3,z3),D点为(x4,y4,z4)。取点P为线段AB上一点,点Q为线段CD上一点(图9)。
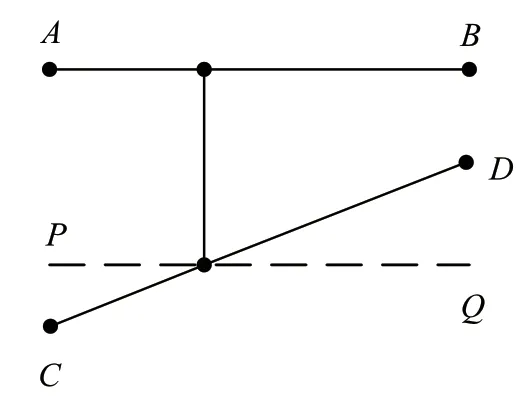
图9 塔机机构简化的空间线段
则P点坐标(X,Y,Z)可表示为
Q点坐标(U,V,W)可表示为
PQ两点间的距离最小值可转化为求f最小值

对s,t分别求偏导,并令偏导数为0,可得
由式(4)可得s,t的值。如果参数s,t满足0≤s≤1,0≤t≤1,则PQ为线段间的最小距离,否则分别求出点A和点B到线段CD的距离,点C和点D到线段AB的距离。比较4 个距离,最小值即为线段AB到线段CD的最小距离。
系统通过分析计算出塔机与固定障碍物发生碰撞的回转角度、小车幅度和吊钩高度,组成固定障碍物的危险区域。当塔机机构运行到危险区域后,系统下发控制指令禁止塔机继续向危险区域运动,实现塔机对固定障碍物的避让。
3.3 多线程技术的研究
为保证PC 端控制软件的整体性能,数据收发、碰撞分析、数据存储和用户界面显示采用多线程技术。
在Win32 下调用Windows 的API 函数编程方式实现串口通信的方式方便灵活,因此系统采用多线程Windows 的API 方式对串口进行操作。
串口操作时考虑到同步操作需要等操作完成才返回,采用异步非阻塞串口通讯方式。线程可以在不同句柄上同时执行I/O 操作,也可在同一句柄上同时进行读写操作,提高了对数据收发效率。
本系统程序运行中若已开启的线程都被占用则自动开启新的线程,当线程空闲时挂起,减少对系统资源的消耗,提升了数据收发效率,又增加了程序响应速度,保证了系统的实时性。
3.4 软件功能
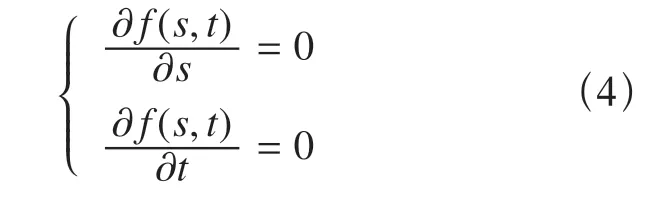
软件具有功能主要包括系统参数设置、塔机参数设置、超载查询、数据查询、实时数据显示、历史数据查询和碰撞分析查询等功能,软件界面如图10 所示。
图10 系统软件界面
4 检测系统应用实例
在试验和测试过程中,改装后的角度传感器支架如图11 所示。调整之后角度传感器出线端指向塔机大臂方向,同时采集角度与塔机防碰撞监控系统坐标系对应。

图11 角度传感器
在测试过程中为提高安装速度,重量传感器采用三滑轮,安装/拆卸方便快捷,且测量精度能满足系统要求。
为验证系统软件的准确性和稳定性,在塔机上安装视频监控,通过调取硬盘刻录机内视频资料来验证防碰撞软件记录的历史碰撞记录是否正确。
通过实例测试,表明了该塔机防碰撞监控系统具有性能稳定、操作简单、界面友好、安装方便的优点,其能够有效准确地检测塔机的运行情况,并对可能发生的干涉碰撞发出预警和报警信息。同时该系统可以安装在不同型号的塔机上,检测率和正确率高,可显著改善塔机施工作业中的安全性和可靠性。
5 结语
塔机防碰撞监控系统是在充分考虑到塔机现场应用情况,结合安全管理要求提出的。通过现场考核,各项性能指标良好,对降低事故发生频率提供了有效保障,达到了预期的设计目标。
