无人机倾斜摄影在公路边坡巡检中的应用
2020-10-29
(甘肃省交通规划勘察设计院股份有限公司,甘肃 兰州 730030)
山区公路建设地势复杂,公路在经过山地丘陵地区时,往往需要开发山体,导致形成高边坡[1]。边坡是指按照一定坡度、坡形进行人工开挖而形成的具有规则形态的斜坡。在公路边坡的防治和加固中,定期巡检尤为重要。公路边坡巡检的目的是查明公路沿线边坡地质灾害点的分布、类型、面积等,掌握边坡现状情况,为开展边坡治理提供基础资料。目前,边坡巡检主要采用人工巡检方式。人工巡检效率低,在地形复杂区域容易形成巡检盲区,且巡检过程中存在作业安全隐患。故需要一种新的巡检方法,提高工作效率,保障人员安全。本文提出将无人机倾斜摄影测量技术应用于公路边坡巡检,以代替传统的人工巡检方法。
1 无人机倾斜摄影测量技术
1.1 基本原理
无人机航空摄影测量系统是一种以无人机为飞行平台,以各类传感器为任务载荷,能够获取遥感影像信息的数据获取系统。无人机航测系统主要包括无人机飞行平台系统、任务设备系统、地面控制系统、综合保障系统与装置等。
传统航空摄影系统只能从垂直角度拍摄,不能获取地物侧面影像。倾斜摄影系统通过搭载五个不同角度的航摄相机,全方位同步采集地表数据,并通过多视影像匹配、快速建模、纹理映射等技术,建立真实的实景三维模型[2],同时能够输出数字正射影像(DOM)、数字高程模型(DEM)等多种数据成果,能够以真实的效果和测绘级精度反映出研究的对象的外观特征、高度及位置等信息[3]。
1.2 数据获取
本文以礼县至武都公路某段边坡为研究对象,论述无人机倾斜摄影测量数据获取技术方法。研究区域长约1km,宽约400m,地形类别主要是山地。数据获取关键技术包括:无人机航空摄影、像控测量、空三加密、多视影像密集匹配、实景三维模型生成、数字正射影像(DOM)及数字高程模型(DEM)生成。
1.2.1 航空摄影
本文采用哈瓦(MEGA V8)无人机搭载五镜头相机,构建无人机倾斜摄影平台。无人机参数见表1,倾斜摄影相机参数见表2。
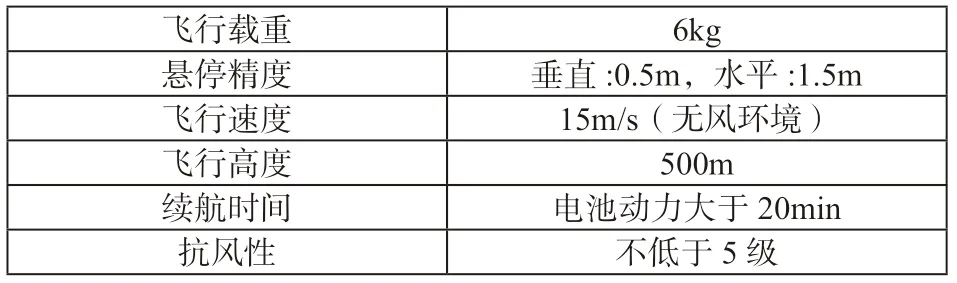
表1 哈瓦(MEGA V8)无人机参数

表2 航摄相机参数
无人机航空摄影关键点是航线设计。依据航摄相机镜头焦距、像元尺寸及地面分辨率设计航高。本文依据1:500比例尺成图及三维建模的要求,像片地面分辨率设计为3.5cm。航线参数见表3。
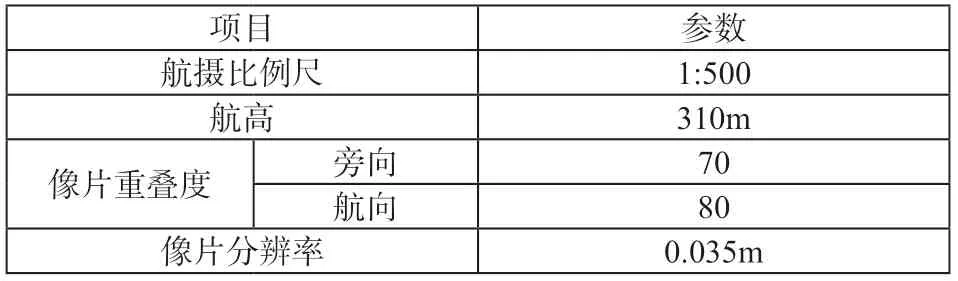
表3 航线设计参数
航摄完成后,获取POS数据、移动站和基站GPS差分数据、基站位置数据,并对以上数据进行后处理,得到精确的姿态文件,下载并整理原始影像,供空三加密使用。
1.2.2 像控测量
由于无人机飞行姿态不稳定、相机相幅小、影像畸变差大,造成精度不稳定,从而需要布设像控点,以提高后期空三加密精度。本文为了保障空三加密和三维模型的精度,在实地共布设和测量4个像控点,采用GPS RTK技术测量像控点坐标成果。
1.2.3 空三加密和影像匹配
解析空中三角测量即在某个区域内,仅仅由外业实测少量的控制点,按一定的数学模型,平差解算出(加密)全部控制点(加密点)及每张像片的外方位元素,又称解析空三加密[5]。光束法区域网平差是常用的空三加密方法,主要思想是用一张像片组成的一束光线作为平差基本单元,再以中心投影的共线方程作为平差的数学模型,以相邻像片公共交会点坐标相等、像控点内业坐标与已知外业坐标相等为平差条件,列出控制点和加密点的误差方程,进行全区域的统一平差计算。共线方程为:

根据垂直影像、倾斜影像数据,结合空三加密解算出来的各影像外方位元素,运用多视影像密集匹配技术,生产出高精度实景三维数字表面模型(DSM)数据。多视影像密集匹配是数字摄影测量的核心技术之一。由于采用五镜头的倾斜摄影系统航拍,所得影像重叠度高,产生大量多余观测,可以充分利用多角度影像的冗余信息,对匹配错误进行改正,同时可以对盲区的地物特征进行补充。常用的多视影像密集匹配算法有CMVS、PMVS方法[6]。
经过影像匹配,获取到数字表面模型(DSM)数据以后,把高分辨率的影像纹理映射到DSM数据表面,生成实景三维模型。对DSM采用滤波的方法对建筑物等进行修正,将建筑物、树木等植被的高程去掉,得到精确的数字高程模型(DEM);再利用DEM数据对影像进行数字微分纠正,得到数字正射影像(DOM)。
本文采用ContextCapture进行自动空三加密和三维模型生成,主要流程为:输入无人机航摄获取的原始像片、无人机POS数据、像控点坐标,像控点转刺即在像片上对像控点进行精确量测,ContextCapture系统自动运算,最后输出空三加密成果及其他各类数据成果。实景三维模型数据采用OSGB格式。DOM数据格式为TIF格式,定位文件为TFW格式,分辨率为0.05m/像素。DSM数据分辨率为0.05m/像素。DEM数据格网间距为0.05m。实景三维模型全景见图1所示,数字正射影像(DOM)见图2所示。
2 边坡巡检
2.1 边坡灾害信息提取

图1 实景三维模型(全景)

图2 数字正射影像(DOM)
公路边坡灾害包括坡面变形病害、坡体变形病害和防护加固工程结构变形病害。常见的边坡病害主要有滑坡、崩塌、泥石流,其中滑坡、崩塌属于坡体变形病害,泥石流属于坡面变形病害。通过无人机倾斜摄影获取实景三维模型、DOM数据后,可以采用人工影像识别和自动解译的方式,提取边坡灾害信息。人工影像识别主要依靠三维模型和DOM数据纹理进行识别,自动解译有面向对象分类、深度学习等算法,采用简译遥感数据处理软件完成。边坡灾害提取信息主要包括边坡灾害的位置、面积、体积、种类等。本文试验区共提取2处较大的边坡滑坡,滑坡三维模型见图3(a)、图3(b)所示。
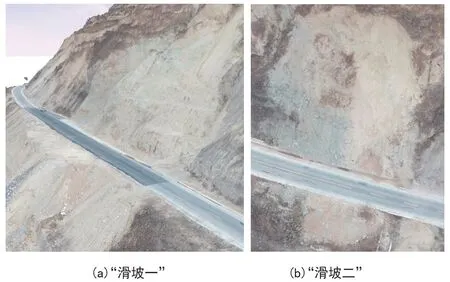
图3 滑坡三维模型
传统的公路边坡巡检资料采用纸质表格手工记录,无法实现数字化管理。本文采用空间数据,采用Arcgis建立gdb文件地理数据库,记录边坡灾害地理位置信息及灾害属性信息。
gdb数据库是一种面向对象的空间数据模型,它对于地理空间特征的表达更接近人们对现实世界的认识。首先创建地理数据库,然后创建要素数据集和要素类。本文创建面要素类,然后添加要素类字段。各字段定义见表4。
表4 名字段定义
本次调查的边坡灾害数据库矢量数据与DOM套合结果如图4所示,滑坡DEM数据如图5所示。
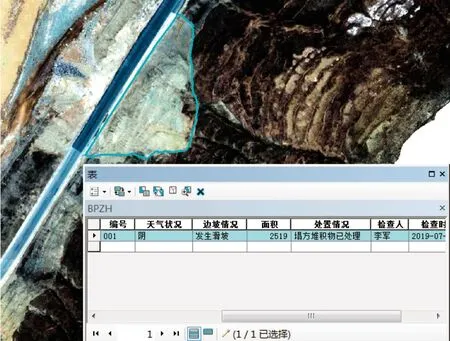
图4 滑坡矢量数据与DOM套合
图5 滑坡DEM数据
2.2 滑坡土方量计算
在公路边坡发生滑坡、崩塌、泥石流等灾害后,为了及时开展灾害治理,需要快速获取土方量信息。本文基于无人机倾斜摄影测量获取的DEM数据,能够实现滑坡土方量的快速测算。主要思想是通过滑坡前和滑坡后的DEM,进行填挖方计算,从而获取土方量。如何获取滑坡前的DEM数据,是一个难点问题。本文采用Arcgis Kriging法生成滑坡前的DEM,以“滑坡一”为例,其滑坡前DEM如图6所示。以滑坡前后两期DEM为数据基础,采用CutFill计算填挖方,然后统计滑坡的土方量为8086m3。

图6 滑坡前DEM
3 结论与展望
采用无人机倾斜摄影测量技术进行公路边坡巡检,能够替代人工巡检方式,大大提高工作效率,具有很高的经济效益和广阔的应用前景。此方法能够快速获取边坡灾害发生的位置、类别等,同时快速计算土方量,为边坡灾害处置提供依据。
采用gdb文件地理数据库记录边坡灾害信息,能够以空间数据方式存储灾害信息的空间位置和属性信息,实现信息化管理,同时为研究边坡灾害的空间分析提供了数据基础。
目前所建立的数据库是二维地理信息数据库,如何利用实景三维模型,将二维地理信息与三维模型挂接,实现二三维一体化,对边坡灾害进行三维可视化模拟及空间分析,将是下一步研究的重点。