基于欧拉梁的管路吸振器振动特性研究
2020-10-29姚伍平唐文兵张针粒鲁民月
姚伍平,彭 旭,唐文兵,张针粒,鲁民月
(武汉第二船舶设计研究所,湖北 武汉, 430064)
0 引 言
在舰船上,由于转子不平衡等原因,泵类旋转机械存在轴频、叶频等十分突出的低频振动线谱,通过基座、管路等通道向外传递[1−2]。动力吸振器(DVA)是被动控制振动线谱的有效手段,已经在汽车、船舶、建筑等领域广泛应用。在设计和应用动力吸振器时,往往将控制对象简化为质点或多自由度系统,根据等效质量和刚度来确定吸振频率。舰船管路系统跨径比大、自身固有频率低、边界条件复杂,对吸振频率和控制效果有较大影响,在开展管路系统吸振设计时,管路已不适合简化为质点或多自由度系统。因此,有必要针对舰船管路系统的特点,开展管路吸振器的振动特性研究。
吴崇建等[3]用弯曲波法建立了多点支撑欧拉梁的运动方程,研究了用动力吸振器抑制梁共振的特性。Park等[4]建立了悬臂梁上集中质量块的频率方程,与前人的研究成果吻合较好。尹志勇[5]等根据梁的能量传递理论设计了三向管路动力吸振器,并在试验台架上验证了控制效果。梁建等[6]以附加阻尼吸振器的固支梁作为分析模型,定性研究阻尼吸振器对电路板共振响应的抑制作用,分析了等效质量比、固有频率比和损失因子等对吸振器控制效果的影响规律。刘天彦等[7]针对管路系统设计了动力吸振器,并通过台架试验验证了吸振器对特征频率的抑制效果。虽然上述学者针对管路吸振器已开展了一些理论和试验研究,但是在建模、设计时均未考虑支撑刚度、激励及吸振器的相对位置等因素对吸振效果的影响。舰船上空间有限,管路支撑方式多样,研究如何在复杂环境中合理布置管路吸振器,提升控制效果,具有重要的工程意义。
本文以欧拉梁振动理论为基础,建立任意横向激励下,不同边界下管路—吸振器系统的横向振动模型,用有限元方法验证模型的准确性,研究了吸振器安装部位、控制对象和支撑刚度等对控制效果的影响规律。
1 管路吸振器系统振动模型
1.1 管路—吸振器系统振动模型
在两端弹性支撑的管路上加装管路吸振器,当管路长度远大于管径时,管路可简化为欧拉-伯努利梁,吸振器可简化为质量-弹簧系统。在任意横向激励作用下,管路—吸振器的振动模型如图1所示。
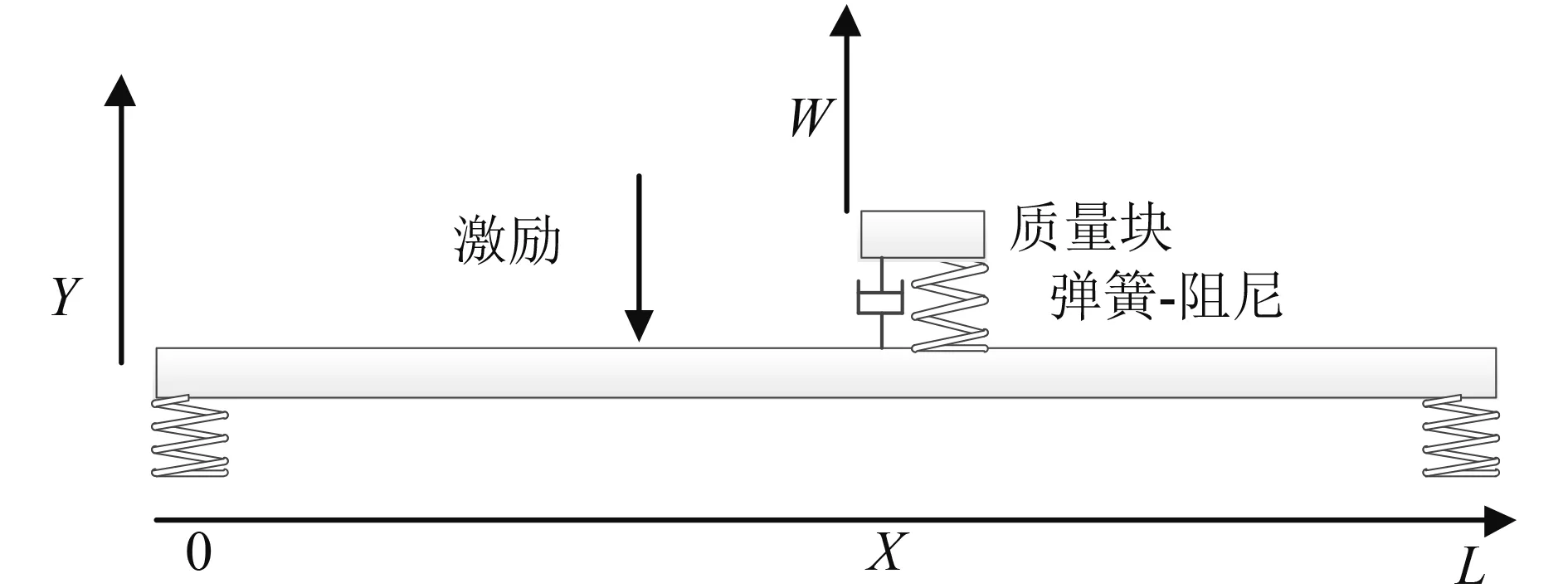
图1 管路—吸振器振动模型Fig. 1 Pipe-DVA vibration model
管路—吸振器的弯曲运动方程如下:
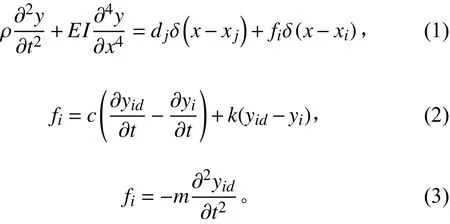
根据振动理论[8],梁的挠度可用振型函数和广义坐标表示:


将式(4)代入式(1),然后代入式(5),可得:
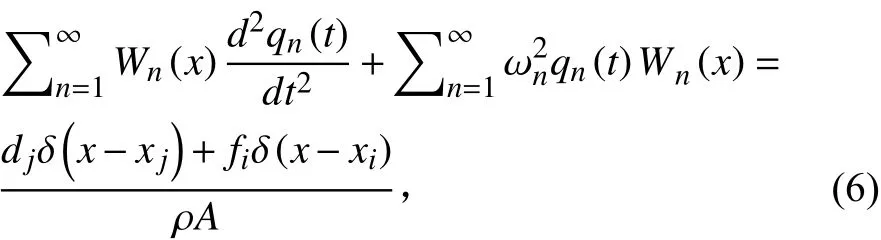
式中,右边第1项为激励源,第2项为弹簧质量系统作用在梁上的力。两边分别乘以,在[0,L]上积分,利用振型函数的正交性和归一性,可得:

对式(7)进行傅里叶变换,可得:
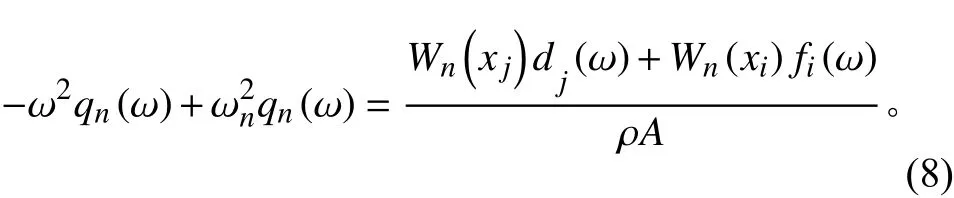
即

与此同时,对式(2)~式(4)进行傅里叶变换,可得:


其中:

1.2 弹性支撑边界下欧拉梁的振动方程
方程(5)解的形式为:

式(14)~式(17)若有非零解,则系数的行列式应为0。经过计算,可得:

式(18)即为管路两端均在弹性支撑状态下,梁的振动频率方程。其中,分别为管路两端支撑的弹性影响因素。
2 计算模型数值验证
选取一种舰船常用的管路,用有限元方法验证本文提出计算方法的准确性。管路规格为外径D=57 mm,内径d=50 mm,长度L=2 000 mm,材料为钢材,弹性模量为2.1E11Pa,密度为7 850 kg/m3,泊松比为0.3。用有限元软件和本文提出的模型,分别计算管路两端分别为刚性支撑、自由和弹性支撑时,管路的前4阶固有频率和振型图。在有限元建模时,管路采用的beam4单元,用combin14模拟弹性支撑边界条件。3种边界条件下,管路的固有频率计算结果如表1所示。
由表1可知,在刚性支撑、自由和弹性支撑等3种边界条件下,本模型计算得到的前4阶固有频率计算结果与有限元计算结果差别在1.6%以内。
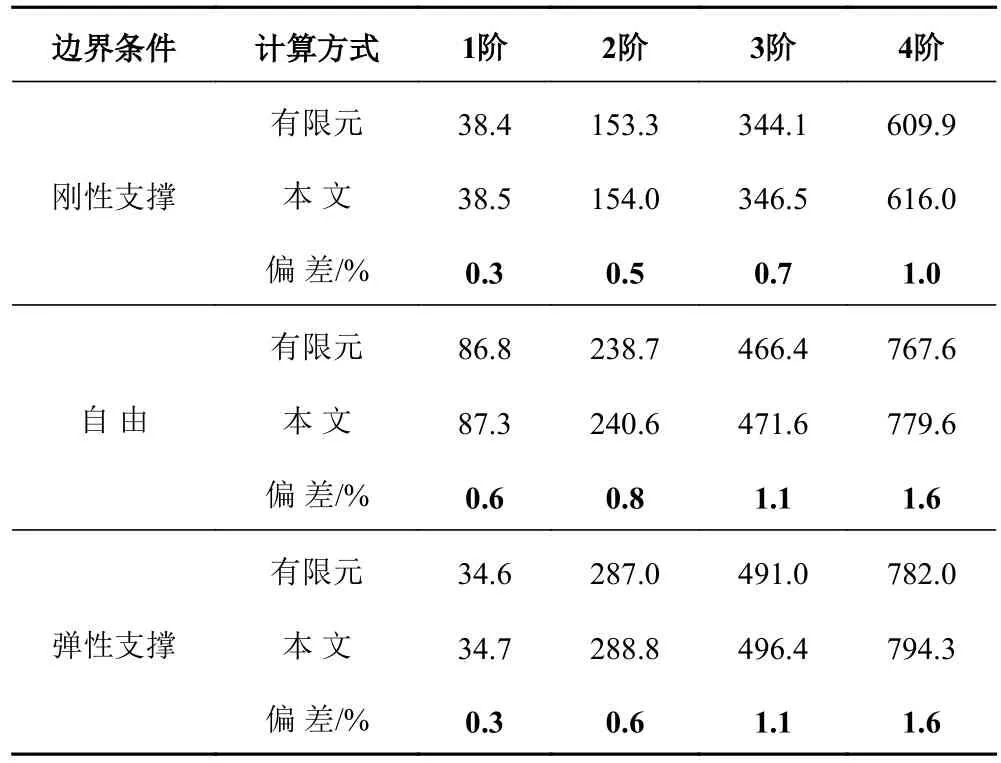
表1 三种不同边界条件下固有频率计算结果对比Tab. 1 Comparison of characteristic frequency under 3 boundary conditions
管路两端分别为刚性支撑、自由和弹性支撑时,用有限元和本文提出的模型计算得到的管路前4阶振型图分别如图2~图4所示。
可以看出,在3种边界条件下,本文计算得到的管路振型图与有限元计算结果基本一致。综合固有频率和振型图的计算结果来看,本文提出计算模型的准确性得到了验证。
3 管路吸振器控制效果分析
3.1 管路吸振器参数设计
根据上一节计算结果,可知在上述刚性和弹性支撑边界下,管路的一阶固有频率分别为为38 Hz和35 Hz,由此可以确定管路吸振器的特征频率。按照设计经验,吸振器与管路的质量比初步取为0.02,吸振器的刚度根据吸振频率及自身质量可确定。图6为在管路两端刚性支撑和弹性支撑的边界条件下,在管路中间x/L=0.5处加装动力吸振器前后,在安装部位施加单位激励后管路的振动响应曲线。
可以看出,在2种边界条件下,针对特定模态在管路加装动力吸振器后,在单位激励下,该阶线谱的振动响应得到明显抑制,而其他频段基本不受影响。在共振频率处,不仅在安装部位,管路整体的振动都得到了有效控制。
3.2 吸振器控制效果影响因素分析
a)吸振器与激励力位置关系
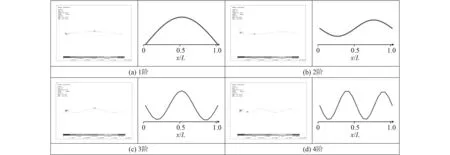
图2 刚性支撑条件下管路振型图Fig. 2 Pipe model shape under rigid support
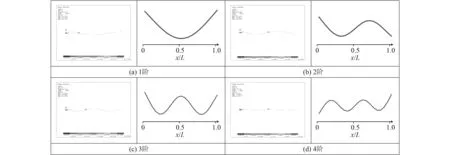
图3 自由状态下管路振型图Fig. 3 Pipe model shape under free boundary

图4 弹性支撑条件下管路振型图Fig. 4 Pipe model shape under elastic support
舰船上空间紧张,管路支撑和吸振器的安装位置都受到一定约束。因此,合理选择管路吸振器和激励力的布置位置,对于提高控制效果具有重要意义。图7为管路吸振器的控制频率为管路的1阶固有频率(35 Hz),管路分别在刚性和弹性支撑状态下,受单位激励作用管路的振动响应。
由图7可以看出,针对特定管路模态,不论管路两端为刚性还是弹性支撑,激励力及吸振器的位置均对管路的振动响应有重要影响。针对控制频率,激励越靠近振动模态的位移极值点,管路整体的振动越大;吸振器布置越靠近振动模态的位移极值点,管路整体的控制效果越好;如果管路两端为刚性支撑边界,不论吸振器及激励的位置如何变化,总有较好的控制效果;若管路两端为弹性支撑,如果激励的位置不在位移极值点,那么吸振器离激励位置越远,控制效果越差。在图7(a)中,当DVA的位置与激励距离△=0.75L时,加装吸振器后管路最大位移与加装前的比值为0.65,加装DVA对管路振动控制效果较差。

图5 中间加装动力吸振器前后安装部位振动响应对比(两端刚性支撑)Fig. 5 Vibration response before and after DVA install(Both ends fixed)
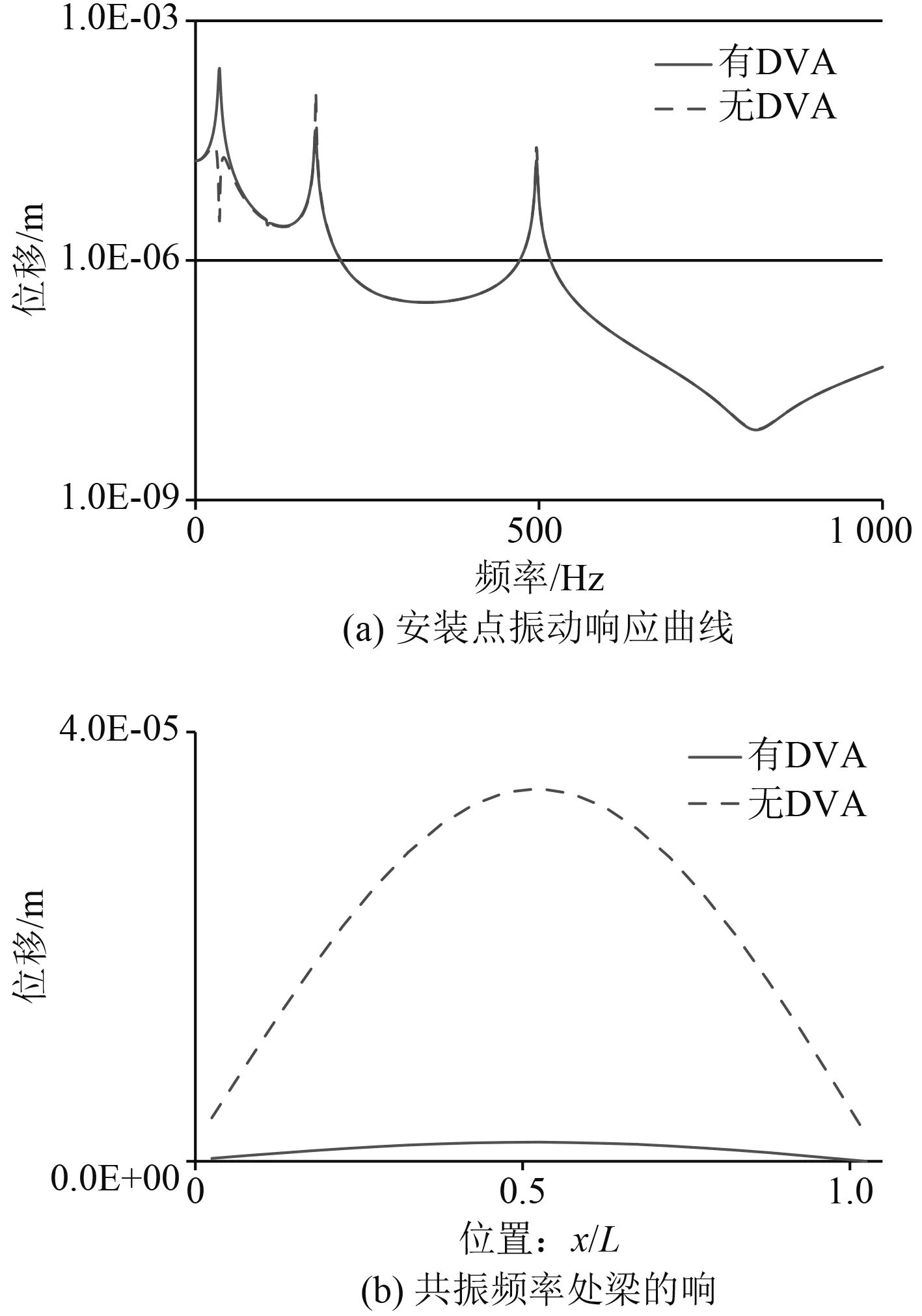
图6 中间加装动力吸振器前后安装部位振动响应对比(两端弹性支撑)Fig. 6 Vibration response before and after DVA install(Both ends with elastic support)
b)非共振频率控制效果
舰船上管路系统的振动响应线谱除了来自于系统自身固有频率,也包含来自设备的轴频、叶频等线谱激励,后者在很多时候是管路振动响应线谱的主要来源。因此,针对线谱激励的控制具有重要的实际意义。同样受限于空间,合理选择吸振器的布置位置,对于控制效果也具有重要意义。以舰船上常见的100 Hz振动激励为对象,设计控制频率为100 Hz的吸振器。图8为管路分别在刚性和弹性支撑状态下,在100 Hz频率处,激励位置与吸振器位置的变化对管路振动响应的影响规律。
由图8可以看出,针对特定激励,不论管路两端为刚性还是弹性支撑,激励力及吸振器的位置均对管路的振动响应有重要影响。针对控制频率,如果吸振器的安装位置与激励的位置重合,那么管路整体的振动会受到良好抑制,如果激励和吸振器均处于振动模态的位移极值点,抑振效果更加显著;如果吸振器的安装位置与激励位置不重合,不论管路两端是刚性还是弹性支撑,随着二者之间距离的增大,控制效果越来越差;当吸振器与激励的距离大于一定值时,会产生严重的负面效果,显著放大管路的振动。在图8(b)和图8(e)中,激励的位置处于x/L=0.25,若吸振器的位置加在x/L=0.75处,那么加装DVA后,管路的振动反而被放大,加装吸振器后管路上最大位移幅值与加装前的比值分别为3.22和4.79。
综上,在针对特定模态频率和针对特定激励应用吸振器时,管路系统的振动特性存在较大差异,后者对激励及吸振器位置更为敏感。因此,以特定激励为管路系统振动控制对象时,吸振器的布置应尽量靠近激励位置。
3)管路支撑刚度
由管路的频率方程可知,管路的振动特性不仅取决于自身,也取决于管路两端的支撑刚度。综合而言,管路支撑的弹性影响因素对管路的振动特性影响最大。图9为2种规格管路的1阶固有频率随弹性影响因素的变化情况。管路规格分别为D=57 mm,d=50 mm,L=2 000 mm和D=114 mm,d=100 mm,L=3 000 mm。
图7 激励及吸振器位置对特定模态控制效果的影响Fig. 7 Influence of DVA position on control effect aimed at specific modal
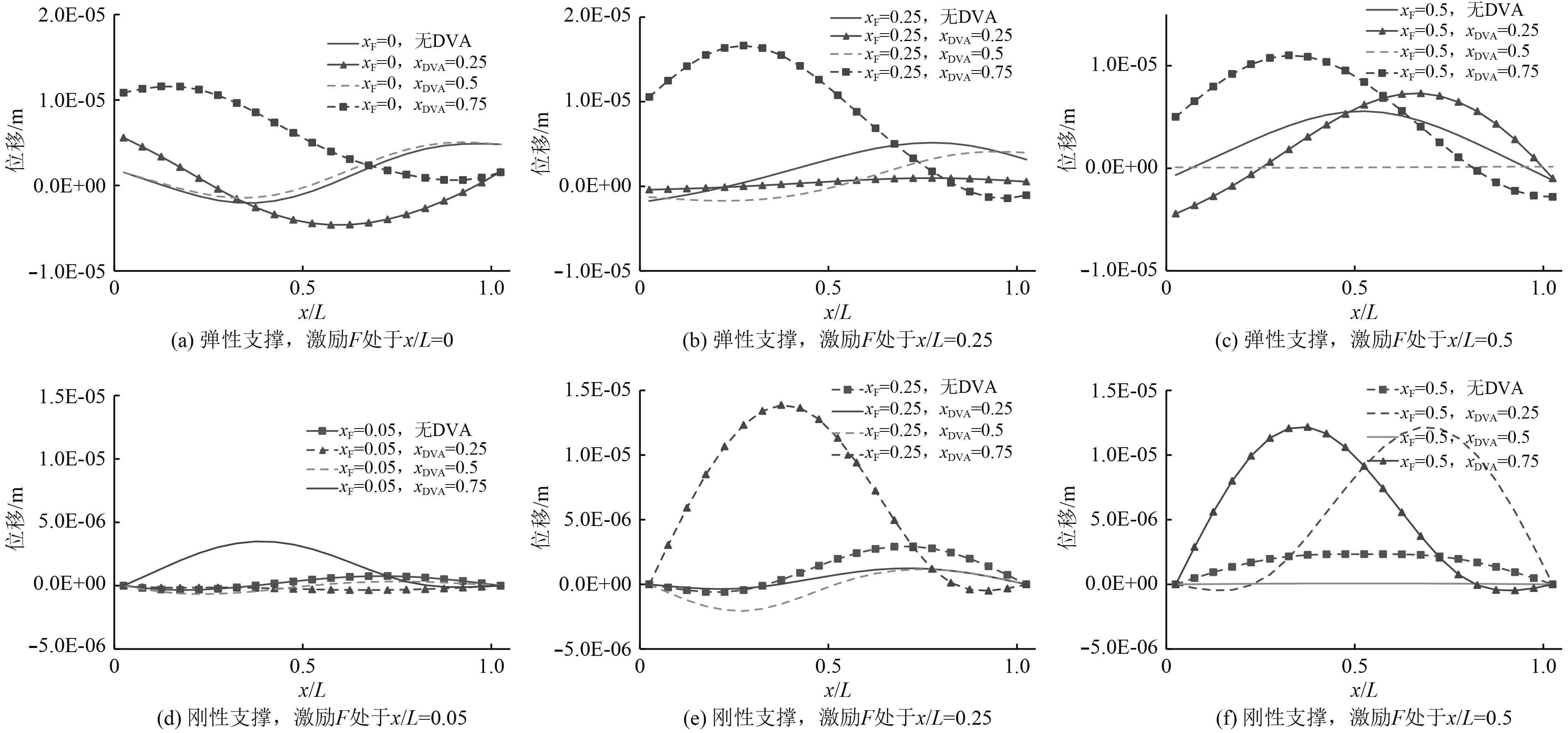
图8 激励及吸振器位置对特定激励控制效果的影响Fig. 8 Influence of DVA position on control effect aimed at specific excitation

图9 管路一阶固有频率随支撑刚度的变化曲线Fig. 9 First characteristic frequency vs support stiffness
4 结 语
通过本文的研究工作,可以得出以下结论:
1)本文提出的一种管路吸振器的振动特性计算方法,在刚性支撑、自由支撑和弹性支撑等不同类型的边界条件下,管路的前4阶固有频率与有限元计算结果偏差在1.6%以内,振型的计算结果基本一致。
2)针对特定模态频率,如果激励的位置不在振动极值点,那么吸振器离激励位置越远,控制效果越差,甚至没有控制效果;吸振器及激励的位置对管路刚性支撑条件的影响要小于弹性支撑。针对特定频率的激励,吸振器与激励位置重合时有良好的控制效果,如果吸振器的安装位置与激励位置不重合,不论管路两端是刚性还是弹性支撑,那么随着二者之间距离的增大,控制效果越来越差,在某些条件下管路振动甚至放大超过3倍。因此,在应用管路吸振器时,应区分控制对象为特定模态频率还是特定激励;以特定激励为管路系统振动控制对象时,高度重视吸振器的布置位置,尽力使其靠近激励。
3)若弹性影响因素特定区间内,管路1阶固有频率对支撑刚度十分敏感。当大于10时,管路两端类似刚性支撑,支撑刚度的增大对1阶固有频率的影响在10%以内;当小于0.1时,管路两端类似自由状态,支撑刚度的减小对1阶固有频率的影响在1%以内。因此,以管路振动模态频率为控制对象设计吸振器时,需要重视管路两端支撑刚度的影响。
