捷联惯导系统晃动基座高精度快速自对准技术研究
2020-10-29芈小龙桂士宏尹洪亮
芈小龙,桂士宏,尹洪亮
(1. 海军装备部,北京 100071;2. 中国船舶集团有限公司,北京 100097;3. 中国舰船研究院,北京 100192)
0 引 言
捷联惯导系统静基座自主对准有外部信息依赖度低的特点,可直接利用惯导系统陀螺、加表输出和零速校正条件,完成粗对准和精对准[1]。传统自对准算法一般依靠重力矢量及地球速率矢量直接估算导航坐标系到机体坐标系的姿态变换矩阵,这种方法对对准环境有严格的要求,一般只用于载体处于静止或微幅晃动条件下。对于系泊或漂浮状态的舰艇,由于受海浪影响,造成其装备的惯导系统测量结果受到严重干扰[2]。在这种环境下,直接采用地球自转角速度作为参考信息计算初始姿态阵的方法已不再适用。但对于加速度计测量到的重力加速度信息,由于其干扰信息一般为谐波形式而且幅值小于重力加速度幅值,因此通过平滑处理可以消除,并提取出重力加速度信息,故地球重力加速度仍可直接作为粗对准的参考信息[3–4]。
由于地球重力加速度在惯性坐标系中的运动轨迹为一圆锥面,因此,若取在惯性坐标系下重力加速度的投影,则其分量就能包含地球自转角速度信息,再结合陀螺和加速度计的输出,就可实现初始姿态阵的粗略估计。
1 粗对准算法设计
1.1 坐标系定义
定义如下坐标系:
采用北天东地理坐标系。
原点位于载体重心的前上右坐标系。
1.2 算法设计
为隔离晃动对自主对准的影响,将姿态矩阵拆分为4个矩阵分别计算,设对准点纬度为,则姿态矩阵可写为:

其中:


由式(7)和式(8)可得:
2 精对准方案
2.1 精对准方案的选择
当惯导系统处于大幅度晃动条件下时,其相对地球的参考速度仍可视为0,因此,选择以速度误差作为观测量构建最优卡尔曼滤波来实现惯导系统的精对准。
2.2 捷联惯导系统误差模型的建立
1)捷联惯导系统误差方程
考虑到惯性元件误差以及系统导航参数误差等的影响,构建导航坐标系为系,定义系相对系的转角为姿态误差角根据捷联惯导力学编排方程,可获得姿态误差方程如下:

其中:
根据捷联惯导速度解算方程,考虑系统误差影响,获得速度误差方程如下:

2)捷联惯导系统状态空间模型
由式(14)和式(15),并设陀螺和加表的测量误差为随机常数,可得到SISN初始对准状态方程为:

状态变量为:

随机噪声状态矢量为:

取速度误差为观测量构建系统观测方程:

3 试验验证与结果分析
3.1 试验条件
为验证本文提的晃动基座自对准算法,选用某中精度捷联惯导系统为实验对象,分别在静基座和晃动基座条件下进行自主对准验证试验。当地纬度信息39.811 75°。
3.2 试验过程
每组试验对准时间为7 min,其中粗对准时间120 s,精对准滤波时间300 s。统计对准结束后纯惯性导航30 min的结果,以此来验证所提方法的可行性。
试验1:静基座自主对准验证试验。惯导系统静止于三轴转台上进行试验。
试验2:晃动基座自主对准验证试验。三轴转台进行晃动,试验过程中惯导系统晃动规律如图1所示。
3.3 试验结果及分析

图1 惯导系统晃动规律Fig. 1 Inertial navigation system sloshing law
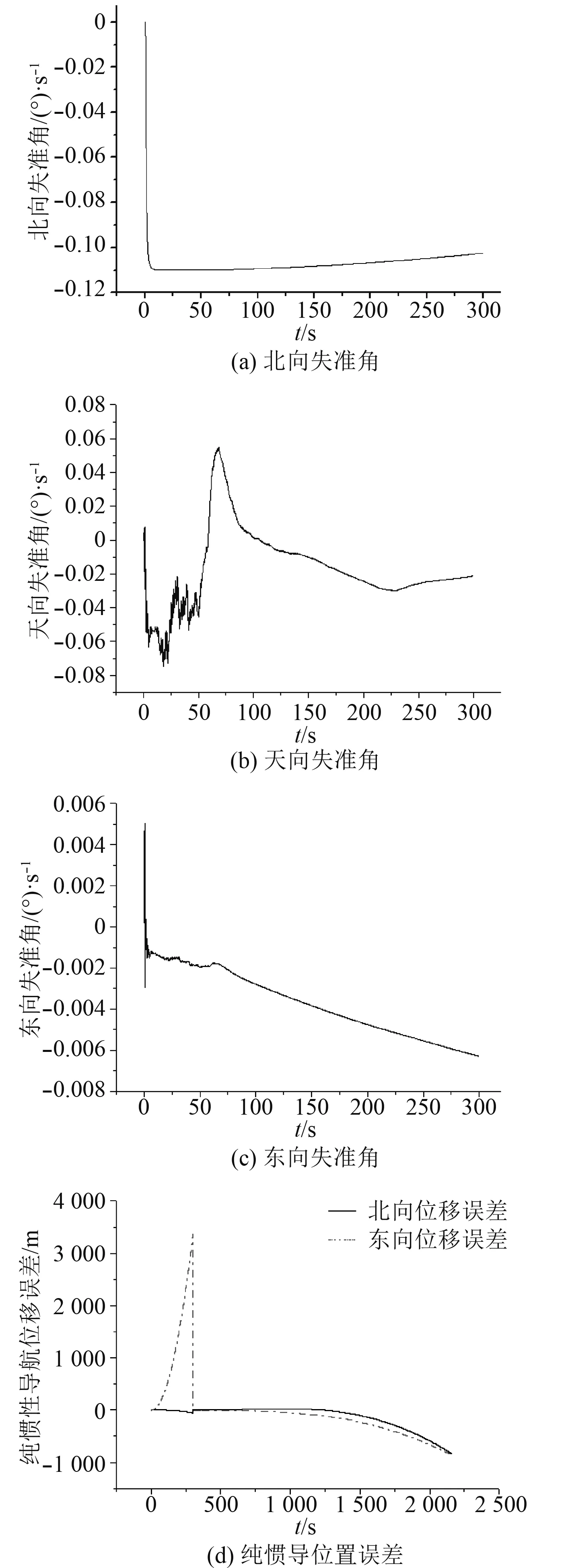
图2 静基座对准及纯惯性导航结果Fig. 2 Static base alignment and pure inertial navigation results
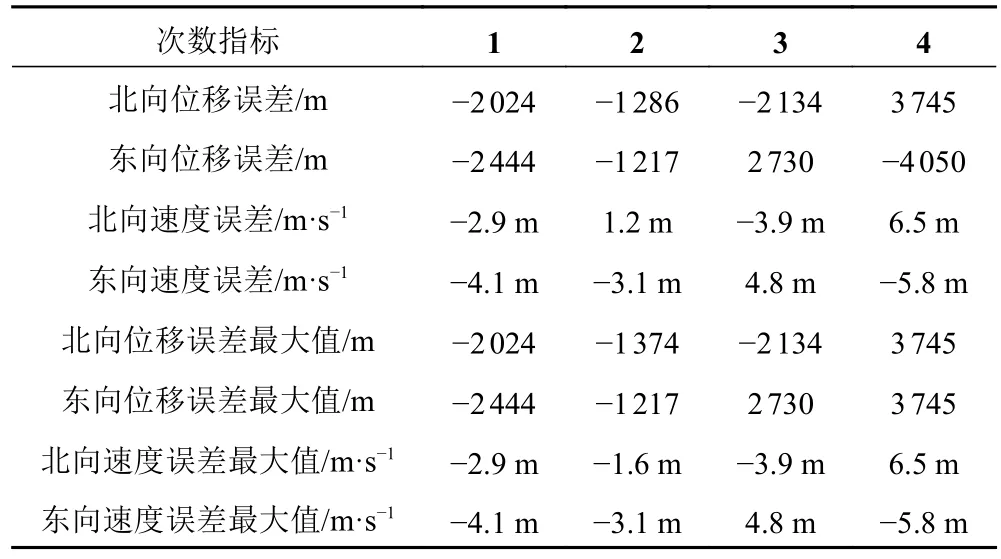
表1 不同晃动条件下对准后30 min纯惯性导航结果Tab. 1 Results of pure inertial navigation 30 min after alignment under different sloshing conditions
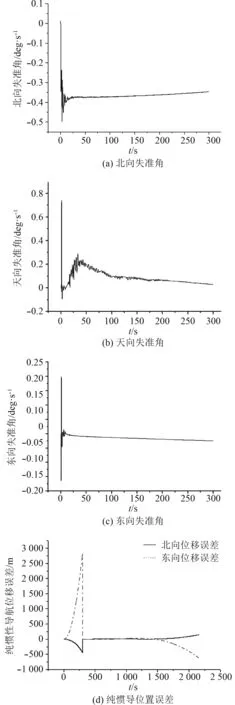
图3 静基座对准及纯惯性导航结果Fig. 3 Wobble base alignment and pure inertial navigation results
图2 为静基座对准试验结果,图3为晃动基座对准试验结果。为比较2种情况下的对准效果,选用对准后自主导航30 min数据,表1为试验结果统计。
由图2可知,晃动基座自主对准方案对准效果与传统静基座自主对准方法差不多,由于可观测性和可观测度不高,方位失准角收敛速度很慢,在5 min的滤波过程中很难收敛,因而影响对准精度。
由图3可看出,晃动基座自主对准方案在晃动条件下,失准角收敛的很理想,方位失准角的收敛速度也快于静基座,从导航结果可以看出晃动条件下的对准效果明显好。
由表1统计的各项导航结果指标可以看出,晃动基座下自主对准方案对准精度较高。
4 结 语
本文利用惯性凝固假设,建立载体惯性坐标系,使载体坐标系相对载体惯性坐标系的姿态阵初值成为单位阵,从而可以进行姿态更新解算。所提方案通过将姿态阵拆分为4个矩阵,选用重力加速度在惯性空间的投影为参考信息,消弱了晃动的影响,保证晃动基座下的粗对准精度。利用高观测性的卡尔曼滤波进行状态估计,提高了算法精度。
