有源外骨骼绑缚系统安全性与舒适性设计探究
2020-10-28明子微干静罗文雪王名祺
明子微 干静 罗文雪 王名祺


摘要:为提升有源外骨骼机器人作为人机系统的可穿戴性,从绑缚系统角度展开探究,以其安全性与舒适性为切入点,在此基础上构建了有源外骨骼绑缚系统的系统性概念与设计优化方向,得到了针对绑缚压力、绑缚部位、绑缚时间、绑缚材料、快速脱卸5个安全性设计策略和针对压力分布、织物触感、适配性和绑缚穿脱4个舒适性设计策略。
关键词:有源外骨骼;绑缚系统;人机耦合;安全性设计;舒适性设计
中图分类号:TB472 文献标识码:A文章编号:1003-0069(2020)09-0134-03
Abstract:Inorder to improve the wearability of the active exoskeleton robot asa human-machine system,this work explores from the perspective of the binding system and uses its safety and comfort as the starting point.Based on that,the
systematic concept and design optimization direction of the active exoskeleton binding system were constructed.At the same time,5safety design strategies for bindingpressure,bindingposition,bindingtime,bindingmaterial,quickrelease and
4comfort designstrategiesfor pressure distribution,fabrictouch,?t,andtie-in and take-off were obtained.
Keywords:Active exoskeleton Binding system Man-machine coupling Safety design;Comfort design
引言
外骨骼是一种可穿戴的机电智能系统,可跟随穿戴者的动作获取运动信息或者通过外骨骼自身动力装置起到增强穿戴者身体机能的作用[1]。由于高额的工伤成本、加速的老龄化社会进程和日益增长的单兵作战能力需求等客观现实,有源助力外骨骼在物流仓储、医疗康复、现代军事等领域都有着非常广泛的应用前景与市场,在众多领域为穿戴者提供负重支撑和运动辅助的外骨骼已成为近年来国内外机器人研究的热点。
有源助力外骨骼作为一种可穿戴的高度人机一体化设备系统,包括运动意图识别、驱动助力、控制操作或装配连接等功能在内都需通过与人体直接产生物理接触的方式实现。作为外骨骼的重要组成部分,绑缚系统不仅负责外骨骼与人体的连接与固定,还是外骨骼系统中承担人机交互的物理界面。因在外骨骼的使用过程中需要人体持续穿戴进行操作,所以从可穿戴性的角度关注人机之间的接触状态和交互体验尤为重要,这也是外骨骼性能评价的关键指标之一。近年以来,有源外骨骼在机械结构、机电一体化和控制策略等方面均已取得了一定的研究成果,但以绑缚系统为主要研究内容的人机交互体验方面研究还相对较少。
本文在参考研读目前世界各国大量相关学术论文及自身对于绑缚系统设计经验的基础上,对外骨骼绑缚系统的可穿戴性展开探究,分别从安全性与舒适性的角度出发,提出了相关设计策略以期降低外骨骼在助力过程中的安全隐患,并提升了穿戴者的使用舒适感。
一、绑缚系统简介
有源助力外骨骼从技术路径层面一般分为传感系统、控制系统和驱动系统三大核心系统,传感系统收集运动相关的信号传递给控制系统,控制系统处理传递来的信号转化为运动指令再传递到驱动系统,最终由驱动系统带动外骨骼的助力行为[2]。从结构支撑层面外骨骼可分为机械系统和绑缚系统,其中机械系统是由背板、腰架或腿部杆件等力传递结构件构成的外骨骼刚性骨架。绑缚系统则是由作用在肢体、腰部或背部等用于实现人机匹配和协同运动的包覆件所构成的柔性支撑。作为穿戴者与外骨骼刚性结构之间的物理接触界面,绑缚系统也是人体与外骨骼之间运动及力反馈等信息传递的重要渠道。人机之间的高度耦合和人机随动通过绑缚系统实现,其设计除需满足基本穿戴要求与人机联动性等功能外,还期望有助于减缓穿戴疲劳感、增加操作持久力并为穿戴者营造良好的生理与心理感受,如图1。
外骨骼与人体连接的形式并非统一,不同的绑缚形式除在人体感知层面存在差异外,对于人机构成的整体物理系统耦合性也有很大影响。目前较为常见的绑缚形式为绑带固连与刚柔耦合的柔顺人机连接:绑带固连是将柔性绑带通过尼龙粘扣等形式直接与四肢及其他部位连接以达到固定外骨骼的目的,由于纯柔性材料在助力过程对力的吸收以及人机之间难以避免的关节对准误差,绑带固接的形式将在绑缚部位产生较大约束力,因此多用于实验室样机阶段。刚柔耦合的柔顺人机连接采取刚性构件作为绑缚系统特定部位的外包覆件使力矩的传递效率更高,在刚性构件内侧嵌套柔性构件与人体直接接触并进行连接,在确保人机随动协调的前提下,在压力缓冲和体感舒适等方面对于穿戴舒适性与个体适应性具有积极影响。除上述常见的绑缚形式外也有一些较为特殊的绑缚形式,如日本研究学者Hasegawa为提高穿戴的舒适性与可操作性,采用空气气垫实现人体和外骨骼之间的耦合,通过控制气垫充放气体而改变耦合强度从而保证穿戴时的刚度和脱卸外骨骼时所需要的低连接强度[3]。Hasegawa还提出了另一种新型夹具的绑缚形式提高了手部抓握外骨骼的可穿戴性,由于该夹具具有重量轻和外形薄等优势,在人机耦合稳定的基础上对于手指本身的运动不会产生妨碍[4],如图2。
二、安全性设计探究
外骨骼绑缚系统的安全性是指在穿戴外骨骼完成既定功能过程中不发生意外的能力,它表明系统在预期的使用环境和使用限制下绑缚系统实现人机匹配稳定的性能。外骨骼绑缚系统可能对穿戴者造成的伤害通常情况下来自于表皮压力过大与运动冲突,导致产生皮肤损伤、肢体干涉、重心不稳等问题。
(一)绑缚压力:绑缚压力是指人体穿戴外骨骼时垂直作用于人体表面,单位面积内受到的作用力。外骨骼的绑缚系统往往通过压迫人体表皮的软组织以增加人机匹配稳定性和提高接触刚度,由此提升外骨骼与人体之间的交互接触力传递效率[5]。适度的绑缚压力对人机的协同运动具有积极影响,运动过程中的适度压力能刺激人体神经兴奋达到提高运动能力的效果。但过度的绑缚压力会造成人体损伤,比如当人皮肤表面承受的压力大于30mmHg时,会导致表面毛细血管血液不流通,危及软组织的安全[6]。由于外骨骼使用时间较长,将整个使用过程中绑缚系统产生的动态压力控制在安全范围内至关重要。
绑缚压力主要来源于绑缚系统所承担的外骨骼自重、静态约束力和动态反作用力。
外骨骼本身重量对身体造成的压力主要体现在穿戴者的肩部与腰部绑缚构件。除了对外骨骼整体系统进行轻量化设计外,在压力集中的绑缚部位采取附加措施有助于缓解局部压强,如在特定部位运用气囊结构的绑缚材料,在外骨骼使用过程中其内部气体互相流动,产生均匀受压“反重力”起到减震缓冲作用。
静态约束力是绑缚构件束缚人体所造成的压力,简称束缚压,通常体现在穿戴者的四肢綁缚构件。控制束缚压通常从与人体直接接触的材料出发,选用拉伸性能好的柔性亲肤柔性层面料,另外,柔性层形状需拟合人体四肢绑缚部位形状,使其受压均匀。
动态反作用力是外骨骼在助力过程中绑缚构件为适应人体运动变化而引起的变形,产生垂直于人体曲面的分解力形成的压力,包括拉伸、压缩、剪切和弯曲应力,简称面压[7]。由于外骨骼驱动系统提供的力矩将先通过机械系统,再到绑缚系统传递至人体相关部位,在此过程中的被助力部位会产生应力集中区域,绑缚系统与肌肉皮肤组织能够高度耦合的原因依赖于人体的柔性肌肉脂肪组织,耦合度也与绑缚部位肌肉柔性物质的力学性能相关,在腰部外骨骼的助力过程中,由于脊柱处肌肉柔性组织薄,频繁起重的工作任务将使腰椎区段承受动态冲击载荷,长时间使用反而会对穿戴者造成额外负担。为解决上述提到的相关问题,可以考虑在人体受动态反作用力集中的绑缚部位增加绑缚构件内侧柔性层厚度,或选用减压性能好的内层填充材料,如图3。
(二)绑缚部位:绑缚部位是外骨骼和人体固定匹配所选取的需要包覆的身体部位,外骨骼绑缚系统与人体往往采用多点接触方式以防止外骨骼与人体之间发生相对位置变动。按照外骨骼所对应的人体穿戴位置,通常可分为上肢外骨骼、下肢外骨骼、腰部外骨骼以及运动关节外骨骼等。不同类型的外骨骼需要绑缚的部位不同,但选择准确的绑缚部位是所有外骨骼系统实现高度人机耦合的基础。不恰当的绑缚部位不仅会对人机协调运动产生影响,甚至会对接触部位组织造成疼痛和伤害。
绑缚部位的选取原则是:在实现穿戴者和外骨骼固定与匹配的基础上,选择人体承力基础较好的非神经敏感部位。人机稳定性是绑缚部位选取的前提,绑缚点位不足会带来外骨骼系统在助力过程中的攒动问题,由此引起的强烈不适配感会导致穿戴者心理对外骨骼产生排异,由攒动带来的关节位置偏差还会产生关节剪切应力。
另外,要注意避免一些不宜进行绑缚的部位,并选择疼痛阈值较高的区域。绑缚系统在人体上肢和下肢应该避免选择的部位主要包括关节运动部位、骨头较多或凸起的部位、表面毛细血管或神经较为密集的部位、易损伤或较为脆弱的部位和皮肤表层的肌腱部位等[8],如图4。
疼痛是由超压引起的损伤的预警信号,同时也是潜在细胞损伤和死亡的预警。疼痛阈值作为一个比较身体不同部位对压力的相对敏感度的指标,是当某部位开始感疼痛时的压强值,可以通过探针测试的方法获得。尽管不同穿戴者对于相同部位的疼痛感临界值存在差异,在确定外骨骼系统对应的绑缚点部位后,可运用统计学原理选取中位数作为一般结果确定该区域内不同部位的疼痛阈值,并尽可能选择疼痛阈值较高的区域。
(三)绑缚时间:绑缚时间是指从穿戴者完成外骨骼的穿戴及调节到将外骨骼完全脱卸这一过程所花费的时间。根据外骨骼系统的不同用途以及实现不同功能,可以将其分为肌体增强型外骨骼、医疗康复型外骨骼、运动辅助外骨骼等。因其不同功能对应的目标人群有显著差异,如肌体增强型外骨骼通常用于军队士兵,医疗康复型外骨骼通常用于疾病或残障人士,而运动辅助型外骨骼通常用于物流搬运从业者。依据对应人群不同的生理特征及健康情况,合理规划绑缚时间有助于避免因长时间穿戴外骨骼造成绑缚部位皮肤表层的伤害。
穿戴者在使用外骨骼助力时应有时间限制,由于绑缚部位常常处于受压状态而影响血液循环,长时间的局部组织持续受压甚至可能导致压疮等健康问题。压疮是皮肤局部受压使血液循环障碍而引起不同程度的皮肤及皮下组织缺血性损伤,通常由持续反复受压、潮湿和剪力或摩擦力的因素造成[9]。在由绑缚构件所构成的局部微环境内,表层皮肤持续受压、闷湿、受关节剪切应力等问题都有可能发生,从而导致上述隐患。通过相关研究对于压迫时间与压疮发生关系可知[10],针对穿戴者自身情况设置安全的绑缚时间范围至关重要。
(四)绑缚材料:绑缚系统的材料选择是设计过程中最为重要的环节之一,通常将其使用的材料分为刚性材料与柔性材料两大类别。
刚性材料一般用于下肢绑缚中的腿部硬质半圆挡板,在有效传递力矩的基础上起到支撑与保护的作用。对于其材料的选择上,需满足无腐蚀性、无毒、无害等基本要求,还应考虑散热性能、抗辐射能力以及绝缘性能等。在材料的成型工艺上,为避免材质对腿部肌肉产生磨损,应保证边缘无金属尖点并加工不小于3mm的圆弧倒角。
柔性材料和人体产生直接接触,由柔性织物引起的触感会影响到人体穿戴外骨骼的体感。应用于外骨骼绑缚系统的柔性材料需满足亲肤、无刺激、质地温和等基本要求,同时还需考虑织物的透气性、透湿性以及摩擦系数等。
(五)快速脱卸:快速脱卸是指在外骨骼出现安全问题时可以快速通过解除绑缚使外骨骼从人体身上脱离。外骨骼人机智能系统与其他的自动化系统一样,都存在随时发生故障的可能性,除了从核心系统本身对其进行预测、防范及处理,还应考虑通过绑缚系统的相关设计使其在紧急状况下快速响应。如当电池出现过热的情况时,可以考虑通过按压肩带连接插扣使搭载电池部件的背负系统快速脱离人体。
外骨骼与穿戴者产生意外碰撞的冲击力也是对其造成伤害的主要来源之一,在机械结构层面,确保运动构件足够刚度的和强度的前提下采取小质量和小惯性的构件和设定安全限位装置都可以有效地提高安全性。同时在绑缚系统层面,其除了保证稳定的穿戴特征,也必须需有快速脱卸的能力。由于穿戴者对于意外具有一定主观预判的能力,方便、快捷、灵活地脱卸外骨骼可以预防相关安全问题的产生。
三、舒适性设计探究
可穿戴式外骨骼系统的舒适性是指人在穿戴外骨骼进行协同运动时心理和生理上的一种主观愉悦和放松的综合感受,与周围的环境也存在密切关系[11]。人体在穿戴外骨骼机器人后会首先感受到来自绑缚系统材料的触感,在运动过程中绑缚系统构件将会与人体形成相互作用力,一段时间后会产生肌肉疲劳感。这些感觉由生理刺激信号产生经皮肤表面的神经末梢传递到神经系统。在此过程中的周围环境、绑缚系统等物理信号被转化为生理信号体现在穿戴者肌电信号、脑电信号、神经兴奋度以及心率上,大脑接收到这些生理信号后,对其进行处理形成一个整体的认知判断,和以往的身体生理状态对比而产生一个舒适度的主观评估,即综合的舒适度判断。外骨骼绑缚系统对生理舒适度评估的影响主要来自于绑缚时的接触压力分布与柔性层织物触感,同时几何尺寸的适配性和操作的便易性也会影响到心理舒适度的判断。
(一)压力分布:在绑缚系统的安全性设计策略中绑缚压力大小关系到穿戴者的安全,而人机系统的舒适性也同样与绑缚压力紧密相关,其主要体现在绑缚系统对于穿戴者的接触压力分布上。由于个体感知的差异性,建立精准的接触压力分布与人机舒适性之间的定量描述方法比较困难,且表皮压力感受器对于压力刺激的反应并不取决与当下所施加的压力,而取决于整个施加压力的动态过程[12]。人体穿戴外骨骼的舒适程度是绑缚系统接触压力和接触面积共同作用的结果,压力过小会引起绑缚滑脱,不仅会造成穿戴不适,还会在绑缚部位产生扭矩影响助力效果。而压力过大又容易引起人体疲劳甚至造成安全问题。上文提到适度的绑缚压力对人机的协同运动具有积极影响,合理地利用绑缚压力可以满足穿戴舒适性需求。
压力舒适性是人体在受绑缚构件束缚或运动时所受的反作用力对人体产生动态力学刺激从而获取的舒适感,研究发现着装感到舒适的压力范围一般在1.96~3.92kPa[13]。此外,当着装压力保持在3.92kPa以内时,着装不会引起人体的生理不适[14]。由于绑缚的部位通常在四肢或腰背部,相关研究表明在在一般情况下前臂、小腿和腰部的压力舒适范围在0.49~2.6kPa,在进行剧烈运动时的舒适压力要比一般情况下高1.96kPa[15]。上述基于舒适阈值的研究建立在穿着紧身服装之上,对同样以柔性层施以压迫感与束缚感的绑缚系统也具有参考意义。
接触面积是绑缚系统中的柔性层与肢体表面接触的空间大小,在施以适度绑缚压力的前提下,适当增加绑缚系统与人体的接触面积有助于提升穿戴的舒适性。但引起人体感觉不适的程度和绑缚系统接触面积存在“U形关系”,根据空间整合理论,随着压力接触面积的增加,表皮压力感知器的数目也随之增加,最终舒适感反而会变差[16]。另外,当压力大小超过一定范围时,集中区域的高压可能比较大区域的中等压力造成的不适感更少。在具体选择最佳绑缚面积范围时,需考虑外骨骼的功能类型与运动情况,结合绑缚部位肌肉压迫量通过对比实验得出。
(二)织物触感:织物触感是指人体皮肤在受到外加织物或服饰作用时的一种生理感觉,具有被动性和不可回避性。外骨骼绑缚系统穿戴在人体衣物外侧或直接与人体皮肤表面发生接触,引起的触感将会直接影响穿戴的舒适性。穿戴者由绑缚织物接触产生的不适感主要包括刺痛感、闷湿感、压迫感、束缚感与滑脱感。其中刺痛感是织物上的毛羽或硬、尖物对皮肤的作用以及人体对织物上的化学物质乃至纤维本身的过敏反应,其产生除了取决于面料纤维的特性,还和纺织工艺紧密相关。压迫感与束缚感主要来源于施加的绑缚压力,同时也与面料本身的拉伸性能相关。闷湿感是含有汗液的织物与皮肤间的黏涩以及汗液蒸发时与皮肤接触的湿冷感,与面料的透气性和透湿性相关。而滑脱感是肢体运动过程中肌肉形状与位置发生变化时织物与人体发生相对滑动造成绑缚松动,与绑缚压力大小以及面料的摩擦性能有关。
在绑缚面料的选取上,通常选用棉纶、涤纶、氨纶等具有良好伸缩性、耐磨性的弹性纤维材料。拉伸性能较差的面料很难适应净助力过程中肌肉形状的变化,会导致绑缚部位强烈的挤压感。目前市面上可供选用的材料一般为上述面料由不同纺织工艺制成的混纺织布,如平纹涤棉织物等,应根据其面料成分所决定的拉伸性能、伸长率、塑形变形率应用于不同的绑缚层与绑缚部位上。
透氣性指织物透过空气的能力,织物只有具备良好的透气性才可以把人体释放的热量和水汽快速向外散发。织物规格参数中对于透气率影响最大的因素分别是纬纱线密度和纬密,前者与透气性呈正相关而后者与透气性呈负相关[17]。透湿性指织物透过水汽的能力,因人在使用外骨骼过程中会排汗散发一定水分,通过绑缚构件的散湿对降低人体皮肤表面湿度非常重要。织物规格参数中对于透湿率影响较大的因素分别是纤维回潮率与织物厚度,前者与透湿性呈正相关而后者与透湿性呈负相关[17]。
绑缚系统的面料摩擦性能是指人体与绑缚构件之间发生相对运动或有相对运动趋势时时,面料接触面上产生的阻碍相对运动的力的大小。选用不同的面料所对应的摩擦性能也不同,它是由织物本身的摩擦机理所决定的,影响面料的摩擦因素很多,如纤维的形状、纱线的捻度、形态特点、组织结构、处理工艺等[18]。在外骨骼绑缚系统中与人体主要发生连接的构件有:肩带、腰封与四肢绑带。可考虑在绑缚构件内侧选用摩擦系数较大的面料作为与人体直接接触面,如三明治网、网状复合面料和起绒布等,这些材料不仅在一定程度上可以抑制外骨骼与人体之间的相对运动,且具有良好的亲肤性与透气性,如图5。
(三)适配性:适配性是指外骨骼绑缚系统设计要能适应穿戴者的几何尺寸。在进行绑缚构件的设计时应充分考虑穿戴者在助力过程中的姿态调整与动作特征,并允许在一定范围内根据穿戴者自身的体形调节绑缚尺寸,以满足不同穿戴者的要求。
(四)绑缚穿脱:在有源外骨骼的穿脱流程中,绑缚构件操作的便捷性同样对外骨骼舒适度主观评估具有影响。穿戴者需首先穿着主要承重部位绑缚构件,再依次根据相关顺序穿戴好相关绑缚构件并对各绑缚部位进行舒适性调整。在脱卸时,一般按照穿戴外骨骼的逆顺序,最后在各构件无干涉情况下将外骨骼平稳脱下。整个穿脱过程需满足穿戴简便、绑缚准确、穿着舒适、脱卸轻松等基本操作要求,同时为了保证穿戴的高效性,需精简绑缚构件结构,保证其有一定的伸缩空间,且绑缚连接件需满足扣合轻松,长度调节简便等要求。
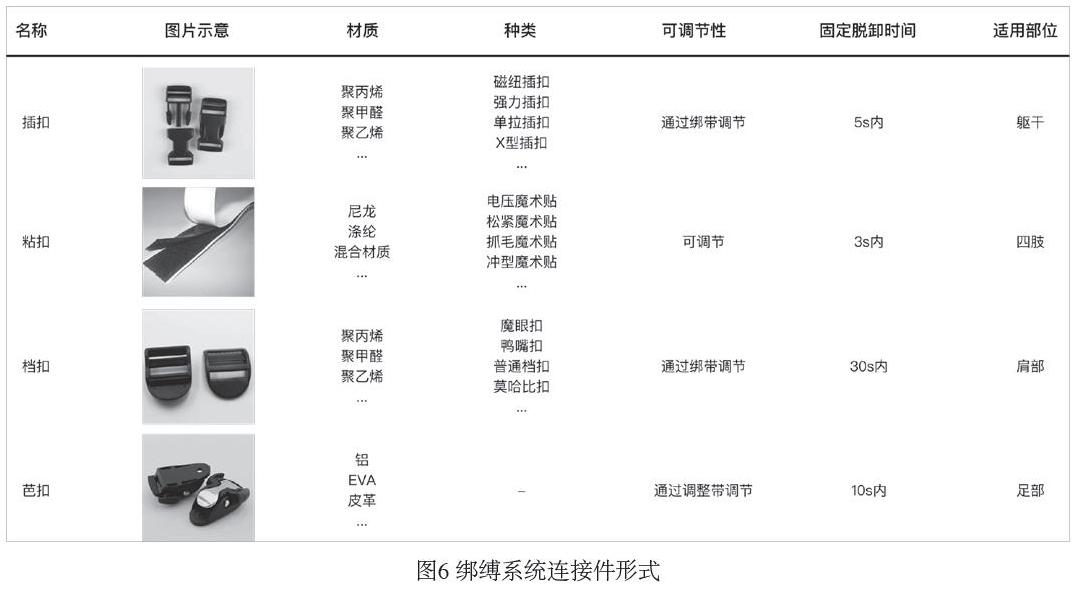
在绑缚构件固定方式的选取上,一般采用插扣、粘扣、档扣和芭扣等,仅插扣来看又可分为磁纽插扣、强力插扣、单拉插扣以及X形插扣等。不同的构件材质不同,连接强度与韧性也存在差别。在四肢绑缚的连接件上通常选取尼龙粘扣,既符合操作简单的要求也便于穿戴者进行调节。在腰部及背部需要承力较大的连接件通常选取插扣或档口,耐用结实的基础上同时操作方便快捷。在足部的连接件的选取上,可考虑使用芭扣,调整带上有棘轮形状的条形槽可以调节绑缚松紧,不仅牢固性能好,且不易磨损,如图6。
结论
可穿戴助力外骨骼是典型的人机耦合系统,其中外骨骼绑缚系统作为连接人与外骨骼的物理交互界面,需具备穿戴安全性与舒适性两大基本要求。外骨骼绑缚系统的设计不仅关系到系统的物理支撑,同时也是系统性能评价的关键指标之一。因此为了确保在人机协同运动中穿戴者的安全,绑缚系统设计应从控制绑缚压力、选取绑缚部位、规划绑缚时间、避免使用有害材料和故障状态下的快速脱卸多环节建立安全规范,减少系统的安全隐患。与此同时,为提升穿戴者在使用外骨骼过程中的舒适性,还应在合理分布压力、选择织物材料、适应人体尺寸、便易绑缚操作环节对绑缚系统进行优化。
参考文献
[1] 张佳帆,陈鹰,杨灿军.柔性外骨骼人机智能系统[M].北京:科学出版社,2011:5.
[2] 李静,朱凌云,苟向锋.下肢外骨骼康复机器人及其关键技术研究[J].医疗卫生装备,2018,39(08):95-100.
[3] Hasegawa Y,Tayama M,Saito T,et al.Active air mat for comfortable and easy to wear a forearm support system[C]//IEEE/RSJ International Conference on Intelligent Robots&Systems.IEEE,2011.
[4] Hasegawa Y,Suzuki T.Thin active?xture to hold?nger for easy attachment and comfort of exoskeleton[C]//International Symposium on Micro-nanomechatronics&Human Science.IEEE,2015.
[5] Anonymous.Wearable Robots.The Science Teacher81.8(2014):23-24.Web.
[6] 王佳.著装压力与人体生理舒适性研究[D].苏州大学,2008.
[7] 孔莉莉.保健护腰压力舒适性研究[D].天津工业大学,2018.
[8] Pons J L.Wearable Robots:Biomechatronic Exoskeletions.Souther Gate,Chichester:John Wiley&Sons Ltd,2008.
[9] Reddy M,GilSS,Rochon PA.Preventing presure ulcel~:a systematicreview[J].JAMA,2006,296(8):974-984.
[10] 徐云侠,胡守紫,钟政荣,et al.压迫时间与压疮发生关系的实验研究[J].蚌埠医学院学报,2015(07):20-22.
[11] 易嘉伟.基于人机工程学的携行式外骨骼人机系统研究[D].西南交通大学,2014.
[12] Krouskop T A,Williams R,Krebs M,et al.Effectiveness of mattress overlays in reducing interface pressures during recumbency.[J].1985,22(3):7.
[13] DENTON M J.Fit stretch and comfort[J].Textiles,1972(3):12-17.
[14] 成秀光,金玉顺.服装环境学[M].北京:中国纺织出版社,1999:112·118.
[15] 王小兵,姚穆.体育防护用品的压力舒适性及运动功能性探讨[J].西北纺织工学院学报,2001,15(2):56-59.65.
[16] Goonetilleke R S,Eng T J.Contact Area Effects on Discomfort[J].Proceedings of the Human Factors and Ergonomics Society Annual Meeting,1994,38(10):688-690.
[17] 杨希,邱弢,孙雪柯,et al.被服面料性能与织物规格参数的相关性分析[J].现代丝绸科学与技术,2012,027(005):177-179.
[18] 罗胜利,张宇群,廖银琳.汽车座椅面料摩擦因数研究[J].上海纺织技术,2018,46(12):51-53.