基于Simulink的半主动悬架PID控制与Fuzzy-PID控制仿真
2020-10-28朱玉刚李江波史晨路
朱玉刚 李江波 史晨路


摘 要:文章基于在Matlab/Simulink对某车型建立二自由度四分之一半主动悬架模型 结合随机路面激励对PID控制和Fuzzy-PID控制策略进行仿真 从而改善车辆舒适性和操纵稳定性。PID控制以被控对象的偏差作为输入 经过比例 微分 积分过后得到控制量 控制简单 应用广泛 Fuzzy-PID是在PID控制基础上结合模糊控制 可以对存在非线性、多时变等较难建立精确数学模型的被控系统取得较好的控制效果。仿真结果表明:相较于被动悬架系统 两种控制策略的半主动悬架系统均改善了悬架性能 并且Fuzzy-PID控制效果明显优于PID控制并且具有良好的自适应能力。
关键词:半主动悬架;Simulink仿真;PID控制;Fuzzy-PID控制
中图分类号:U467 文献标识码:A 文章编号:1671-7988(2020)18-152-05
Abstract: This paper was based on Matlab/Simulink to establish a two-degree-of-freedom 1/4 semi-active suspension model of a vehicle. Combined with random road excitation, the PID control and Fuzzy-PID control strategy were simulated to improve vehicle comfort and ride handling. PID control takes the deviation of the controlled object as input, and obtains the control quantity after proportional, differential, and integral integration, this control is simple and widely used. Fuzzy-PID is based on PID control and combined with fuzzy control, which can achieve better control result for controlled system that have nonlinearities、multiple time changeand other difficult to establish accurate mathematical models. The simulation result show that the semi-active suspension system with both control strategies could improve the suspension performance compared to the passive suspension system, and the effect of Fuzzy-PID control is obviously better than PID control and has a good adaptive ability.
Keywords: Semi-active Suspension; Simulink; PID control; Fuzzy-PID Control
CLC NO.: U467 Document Code: A Article ID: 1671-7988(2020)18-152-05
前言
隨着汽车技术的发展 人们对于车辆舒适性和操纵稳定性的要求越来越高 半主动悬架技术的研究逐渐引起人们的重视[1]。智能控制方法在悬架控制方面已广泛应用。PID控制是半主动悬架系统中较为泛用的控制方法 PID控制器由比例 积分 微分三大部分组成 因其控制结构和算法简单易于实现 应用范围广 在面对一些控制对象复杂状况是适用性强[2]。但在面对拥有时变 动态特性和非线性特性的系统中PID控制并不能进行理想的控制。在设计过程中一般将一些能够克服其技术缺点的控制技术融合到PID控制技术中 从而形成一种可以达到理想控制效果的控制技术。[3]
传统的控制方法在进行半主动悬架等具有非线性 非时变特性的系统的控制策略的研究时 很难达到理想的控制效果。为了在非线性 多时变系统中建立较为精确的数学模型并达到良好的控制效果 模糊控制理论的加入十分重要[4]。通过PID控制与Fuzzy算法的结合可以实现参数的动态调节 忽略汽车行驶过程中悬架系统参数的变化 达到更好的控制效果 从而改善汽车行驶平顺性。
本文以二自由度半主动悬架系统为研究对象 通过simulink进行仿真模型搭建。以路面白噪声模型作为模型激励输入以轮胎动载荷、悬架动挠度、车身垂向加速度作为悬架性能改善的主要性能指标 搭建了PID控制模型和Fuzzy-PID半主动悬架控制模型 并且与普通被动悬架性能进行对比 研究两种控制方法对被动悬架性能的改善。
1 建立二自由度1/4半主动悬架数学模型
1.1 1/4半主动悬架微分方程
悬架在运动过程中具有非线性的特点 在进行仿真分析之前要对悬架系统进行简化 建立二自由度四分之一半主动悬架数学模型 如图1所示。
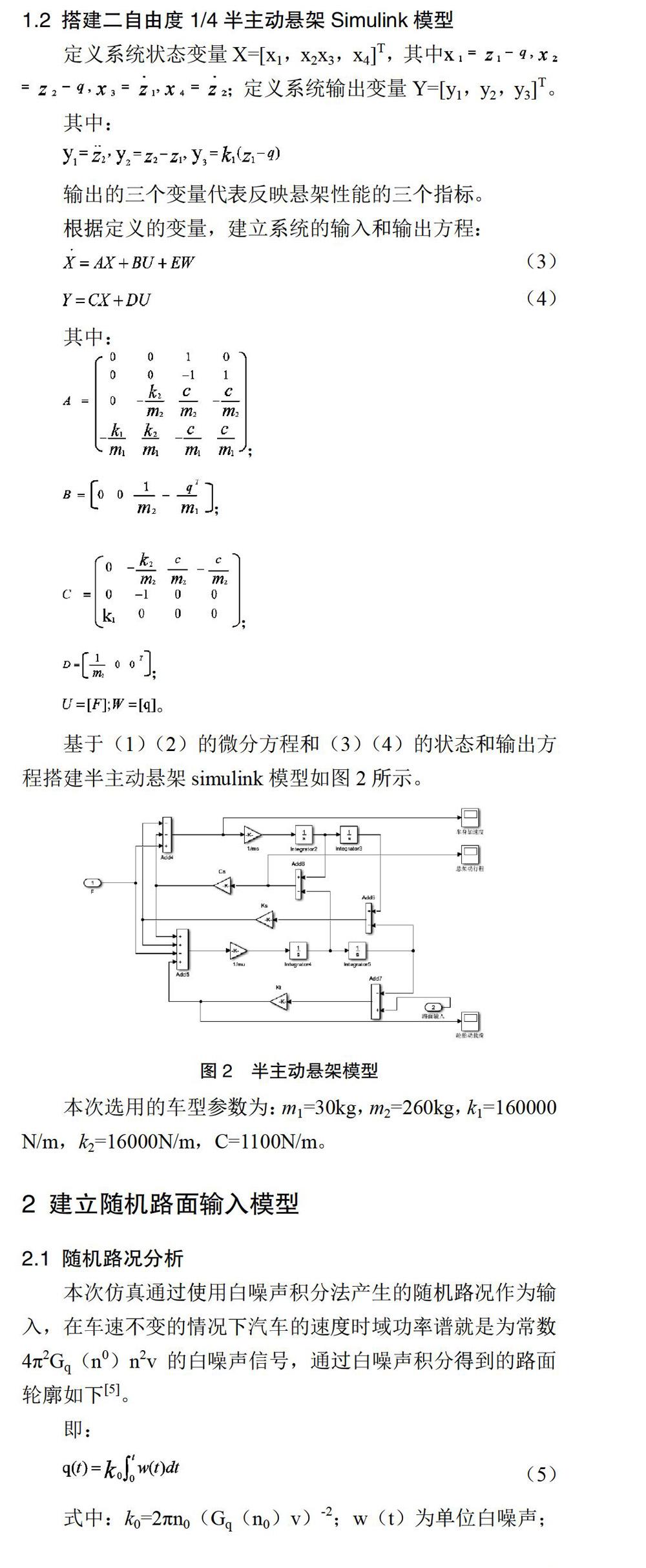
1.2 搭建二自由度1/4半主动悬架Simulink模型
定义系统状态变量X=[x1 x2x3 x4]T 其中 ;定义系统输出变量Y=[y1 y2 y3]T。
2 建立随机路面输入模型
2.1 随机路况分析
本次仿真通过使用白噪声积分法产生的随机路况作为输入 在车速不变的情况下汽车的速度时域功率谱就是为常数4π2Gq(n0)n2v的白噪声信号 通过白噪声积分得到的路面轮廓如下[5]。
2.2 搭建随机路面模型
以路面为C级为基准 路面不平度系数Gq(n0)=256×10-6 m3 设置车速为25m/s 通过Matlab/Simulink构造出积分白噪声模型 如图3所示。
3 PID控制系统设计
3.1 PID控制原理
PID控制器由P(比例) I(积分) D(微分)三大环节组成。P(比例)通过系统进入控制状态在出现偏差时进行补正;I(积分)通过在系统静态时进行标定来提高系统控制的精确性;D(微分)的目的是通过修正系统中出现的偏差来提高精确度和灵敏度 提高了控制的稳定性[6]。PID控制原理图如图5所示。
3.3 PID控制算法参数设定
从PID控制原理上可以看出 要使控制效果达到最佳必须寻找合适的kp ki kd参数。kp ki kd这三个参数是互相影响 相互作用的 调整参数的同时控制效果也会发生变化。本次仿真通过使用试凑法 观察改变PID参数变化后控制效果的变化来确定参数。在调整kp的大小的时候 通过将kp从很小增加到很大 再从很大逐步降低到很小的方法调整参数 并观察控制效果的变化。通过观察控制效果曲线的变化选取最优的kp值;积分系数ki的调整和比例系数kp的调整相似 同样将kp从小增加到大 观察控制效果的变化。在调整kp和ki参数时 如果控制效果不是很理想 这时就要考虑微分系数kd在控制策略中的影响。kd与kp ki系数的调整策略相同 将kd从小增到大的同时微调比例系数kp与积分系数ki 反复调整三个参数的值最终得到理想的控制效果。最终选取kp=20 ki=225 kd=0.003。
4 Fuzzy-PID控制系统设置
4.1 Fuzzy-PID控制器结构
Fuzzy-PID控制原理如图7所示。通过模糊控制策略的调整可以减少汽车行驶过程中参数变化的影响 达到更好的控制效果 从而改善汽车行驶平顺性。
控制器的结构为二维模糊控制器 模糊控制器的输入量为车身垂直速度误差信号和车身垂直加速度信号 用e和ec表示。输出量为比例系数 积分系数 微分系数 用kp ki kd表示。输入 输出变量的取值均在{NB NM NS ZO PS PM PB}中选取。
4.2 Fuzzy-PID控制器
选取车身垂直速度误差信号e的基本论域为[-1 1] 模糊论域为{-3 -2 -1 0 1 2 3};车身垂直加速度信号ec的基本论域为[-8 8] 模糊论域为{-3 -2 -1 0 1 2 3};输出的基本论域为[-900 900]模糊论域为{-6 -4 -1 -2 0 2 4 6};量化因子ke取0.36 kec取3.75 比例因子取150。模糊控制器的函数选择为三角函数trimf fuzzy控制器如图8所示。
4.3 确定模糊规则和控制策略
在模糊PID控制器的控制算法设计中 模糊规则的设计十分重要 必须在设置差值e和差值变化率ec的过程中根据变化将参数kp ki kd设定在一定范围内。
参数e ec kp ki kd选取的NB NM NS ZO PS PM PB七个模糊语量 采用if A and B then C 的控制语句不断调整 直到得到合理的控制规则,每一条模糊规则都对应着一条控制语句[7]。e ec kp ki kd通过高斯函数得到自己的隶属度 通過重心法找出控制作用分布的中心来反映输出的模糊推理结果。最终得到的控制规则表如图9所示。
5 仿真结果分析
在相同的车速和同一路面条件下,对被动悬架,PID控制半主动悬架,Fuzzy-PID控制半主动悬架进行仿真,观测轮胎动载荷、悬架动挠度、车身垂向加速度这三个评价指标。得到数据如图11-图13所示。
6 总结
本文通过对二自由度半主动悬架系统为研究对象,搭建PID控制模型和Fuzzy-PID控制两种控制策略,与被动悬架相比,PID控制下优化了13.96%,3.6%,15.2%,Fuzzy-PID控制使悬架三项性能指标分别优21.8%,9.1%,27.4%。两种控制方法对悬架性能均有改善,并且Fuzzy-PID控制在非线性条件时具有良好的自适应能力,优化效果要好于PID控制,为今后的半主动悬架系统研究提供了参考。
参考文献
[1] 杨惠.基于模糊PID的车辆半主动悬架系统研究[J].现代信息科技,2019(7);2096-4706.
[2] 汤建新,张腾,牛塞塞.半主动空气悬架的PID优化控制和联合仿 真[J].汽车实用技术,2018(1);1671-7988.
[3] 王大勇,王慧.基于变论域模糊控制的车辆半主动悬架控制方法[J].中国机械工程, 2017, 28(3):366-372.
[4] 袁海英,高远,王雨涛,等.车辆主动悬架系统的舒适性优化控制[J]. 计算机仿真, 2018, 35(1):141-146.
[5] 韩豫萍.智能控制在汽车半主动悬架中的应用[D].山东:山东轻工业学院,2019.
[6] 孙士雷.电子控制主动式空气悬架充放气特性控制策略的研究 [D].山西:山西太原理工大学,2019.
[7] 刘会森,张玉莲,董全林.模糊PID在智能调节阀控制系统中的应用[J].机床与液压,2018,46(1):91-96.
[8] 刘潜,王天利.汽车半主动悬架的模糊PID控制仿真研究[J].农业装备与车辆工程,2017(7):21-24.
