四轮独立驱动电动汽车驱动控制策略研究
2020-10-28姬晓李刚郭增江
姬晓 李刚 郭增江

摘 要:电动化、智能化是汽车未来的发展趋势 分布式电动汽车近年来发展迅速 四轮独立驱动电动汽车作为其中的一种形式 在很多方面具有有优于传统汽车的控制优势。文章对四轮独立驱动电动汽车的驱动控制策略进行研究 采用神经网络PID控制设计横摆力矩控制器保证汽车的侧向稳定性 以保持车轮的最佳滑移率为目标研究了驱动防滑控制 通过实验验证驱动防滑策略能够有效防止车轮打滑和严重失稳现象。研究表明:该驱动控制策略能够对四轮驱动汽车的驱动力矩进行合理分配 能确保车轮在附着系数不均路面上具有足够的驱动力。
关键词:驾驶员;加速特性;K-means聚类算法;神经网络;横摆力矩控制
中图分类号:U469.72 文献标识码:A 文章编号:1671-7988(2020)18-01-03
Abstract: Electricity and intelligence are the future development trends of automobiles. Distributed electric vehicles have developed rapidly in recent years, four-wheel independent drive electric vehicles as one of the forms, have control advantages over traditional vehicles in terms of active safety and energy saving. This paper studies the driving control strategy of four-wheel independent driving electric vehicles. Using neural network PID control to design the yaw moment controller to ensure the lateral stability of the automobile. The drive anti-skid control is studied with the goal of maintaining the optimal slip rate of the wheel. Experiments verify that the drive anti-skid strategy can effectively prevent wheel slip and serious instability. Research shows that this drive control strategy can reasonably distribute the driving torque of four-wheel drive vehicles and ensure that the wheels have sufficient driving force on roads with uneven adhesion coefficients.
Keywords: Driver; Acceleration characteristics; K-means clustering algorithm; Neural network; Yaw moment control
CLC NO.: U469.72 Document Code: A Article ID: 1671-7988(2020)18-01-03
前言
四輪独立驱动电动汽车利用四个电机独立控制汽车的四个车轮 与传统汽车相比机械结构更简单 布局更灵活 使得整车的车辆动力学有很大的自由设计空间。充分利用上述结构优势 可以对每个车轮的驱动力进行调整优化 其动力响应更加快速稳定[1]。
国外多所高校和科研机构相继对四轮独立驱动电动汽车的底盘控制展开研究。韩国首尔国立大学Kim Wongun[2]针对八个轮毂电机独立驱动车辆设计了一种驱动控制算法 分为上下两层 上层控制器根据参考速度和转向指令确定附加净横摆力矩和纵向净力以及车轮转角 下层控制器进行其余牵引力和制动力的协调工作满足所需求力和力矩。通过MAT -LAB/Simulink动态模型进行计算机仿真证明其可行性。
汉阳大学Kim Sang-Ho[3]对后轮轮毂电机驱动电动汽车的轮胎力分配方法进行了改进。通过PID理论控制后轮驱动力缩小实际横摆力矩和期望的差距 同时满足提高车辆稳定性和节省电能的需求。最后在CarSim仿真环境下的实验验证了该算法的有效性。
国内 清华大学陆东斌[4]等研究了四轮驱动轮毂电机电动汽车的扭矩分配方法。控制电流使转矩平均分配可以获得电机系统的的最高效率 仿真试验结果表明 该方法可以使整车能量效率达到最佳。
辽宁工业大学李刚[5,6]对四轮轮毂电机电动汽车的驱动力分配方法进行了研究 采用模块化的思想建立了15自由度非线性汽车模型 应用无轨卡尔曼滤波理论对车速进行估计 并在典型工况下对算法进行仿真实验验证。最后通过合理分配四轮驱动力制动力 提高了车辆的行驶效率和再生制动的制动能量回收率。
1 横摆力矩控制器设计
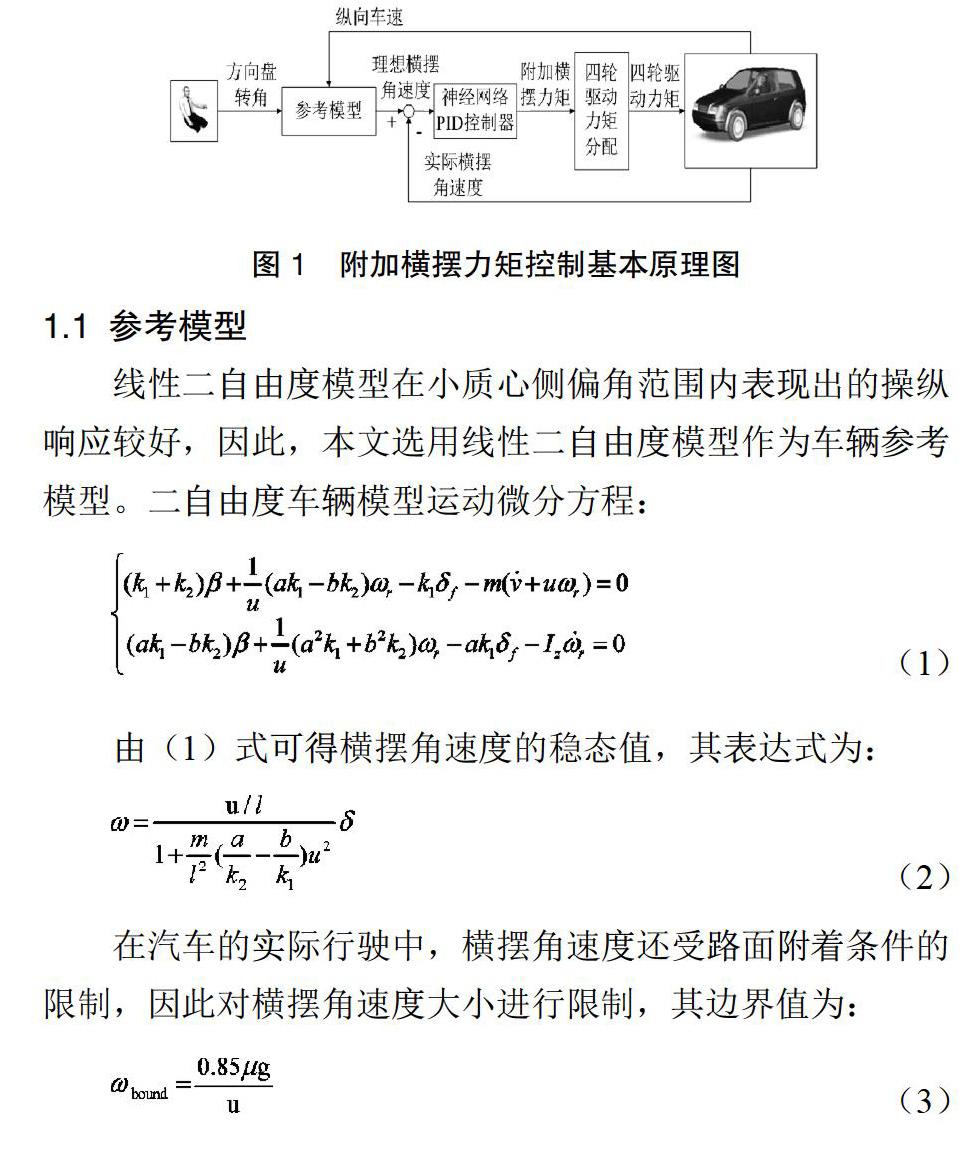
附加横摆力矩控制策略为将车辆收到的横摆角速度实际信号值与理想差值输入信号 通过自适应控制输出相应的横摆力矩。如果横摆角速度的实际值与理想值之差较大则输出相对较高的附加横摆力矩对驱动力矩的分配进行调节 快速降低横摆角速度的实际值与理想值的偏差直至达到目标控制效果 形成有效的控制回路。附加横摆力矩控制的基本原理如图1所示。
1.1 参考模型
线性二自由度模型在小质心侧偏角范围内表现出的操纵响应较好 因此 本文选用线性二自由度模型作为车辆参考模型。二自由度车辆模型运动微分方程:
1.2 神经网络PID控制器
本文PID控制器的输入为横摆角速度偏差 即上文中参考模型计算的理想横摆角速度值与实际之差。输出为附加横摆力矩 由比例、积分和微分环节的线性组合计算得到 表达式如下[7]:
式中:Kp为比例增益;Ti为积分时间常数;Td為微分时间常数。
神经网络通过无数神经元的建模和联接探索模拟人脑神经系统并研制一种具有学习、联想、记忆等智能功能的人工系统。因此 神经网络与PID控制结合后形成的神经网络PID具有更高的适用性和可靠性。
神经网络控制器增量PID控制结构更新:
式中 K为神经元的比例系数 k表示迭代次数 ηi表示学习效率 zi等于ei表示误差。
由上述原理在Simulink中搭建模型 输入为e(t)及PID三个神经元的学习效率 输出为附加横摆力矩u(t)和控制器的P、I、D三个参数。
2 驱动防滑控制方法
为保证车辆充分利用地面附着条件 获得良好的驱动能力以及侧向稳定性 需设计合理的驱动防滑控制机制使车轮处于最佳滑转率范围内 通过经典的PID控制器调节车轮输出力矩达到目标。
通过该闭环控制使车轮的滑转率始终接近最佳滑转率 控制目标为车轮滑转率和最佳滑转率的差值 控制量为电机输出的驱动力矩。控制逻辑如下所述:当车速大于设定车速值v0 时 根据当前车辆信息计算出四个车轮的滑转率。当滑转率小于最佳滑转率的时候 认为车辆未发生滑转 输出使能信号使直接横摆力矩控制模块生效直接进行四轮驱动力的分配 驱动防滑控制模块不进行参与。当滑转率大于最佳滑转率的时候 输出使能信号使驱动防滑控制系统工作 直接横摆力矩控制不参与。车轮输出力矩由经典的PID控制器调节 进行驱动防滑控制 左前轮和右前轮的驱动力矩取二者中较小值 左后轮和右后轮的驱动力矩同样取小。
3 驱动防滑实验仿真
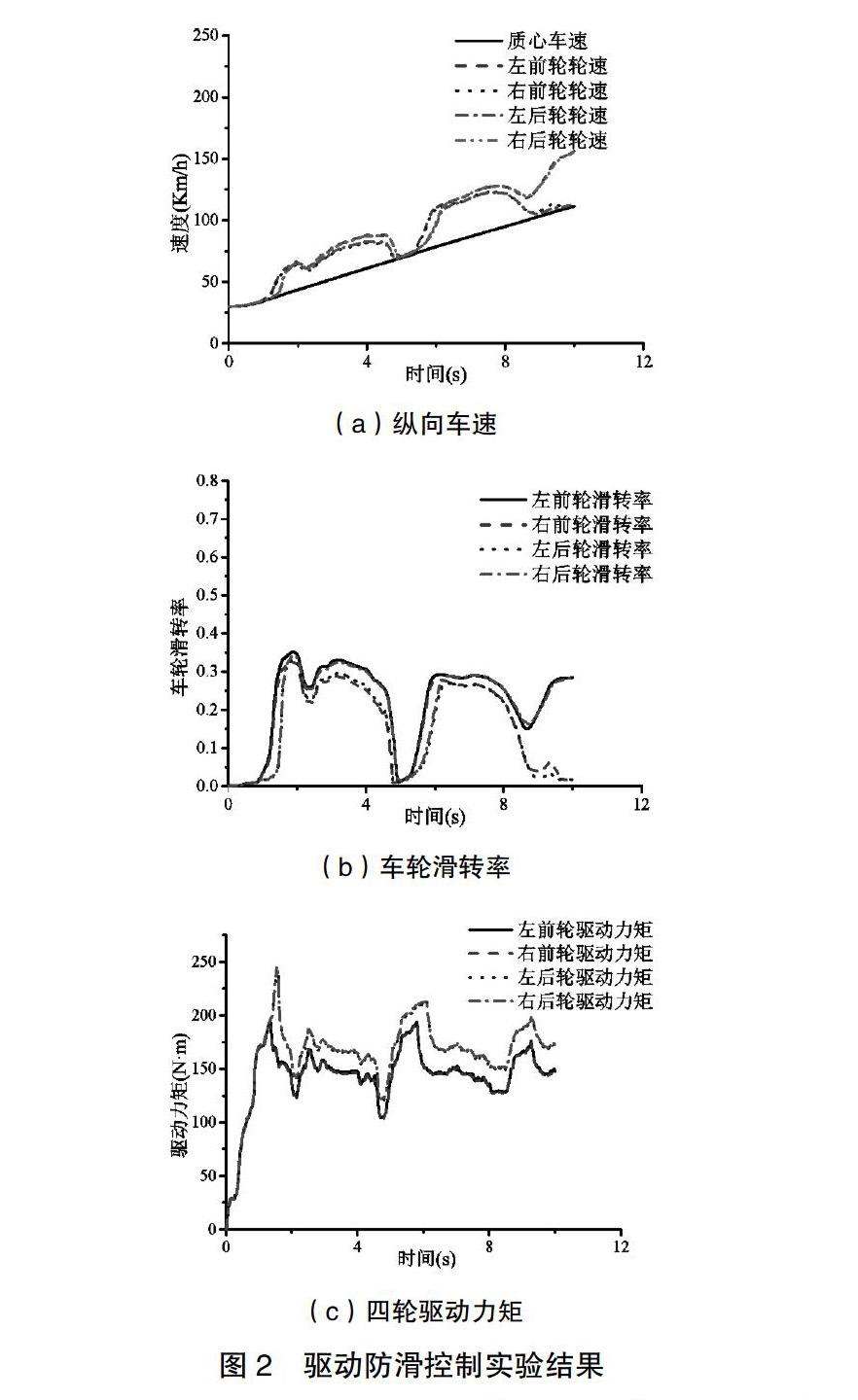
(a)纵向车速
(b)车轮滑转率
(c)四轮驱动力矩
进行仿真实验对驱动防滑策略的实用性进行验证 路面附着系数0.6 初始车速30km/h 方向盘转角0 度 实验结果如图2所示。图2(a)、(b)、(c)表明:在低附着系数路面的初始阶段 四轮轮速与质心车速基本保持相同 车轮在低附着路面上处于小滑转率范围;随着驱动力矩的增大 四轮轮速高于质心车速 车轮滑转率快速上升;驱动防滑控制器识别滑转状态后进入工作状态 控制驱动力矩使四轮轮速不再继续上升 表明驱动防滑控制器起到了一定的稳定作用。
4 结论
本文研究了四轮独立驱动电动汽车的驱动控制策略。首先设计了基于神经网络PID控制理论的横摆力矩控制器 通过车辆横摆角速度实际与理想值之差计算出附加横摆力矩。最后研究了驱动防滑控制 确保车轮在路面附着系数不均路面上有足够的地面驱动力。
参考文献
[1] 赵华慧.四轮独立驱动电动车分工况驱动力分配策略研究.西南大学硕士学位论文, 2016.
[2] Wongun Kim, Kyongsu Yi, Jongseok Lee. Drive control algorithm for an independent 8 in-wheel motor drive vehicle. Journal of Mechanical Science & Technology, 2011, 25(6): 1573-1581.
[3] Sang-Ho Kim, Dong-Hyung Kim, Chang-Jun Kim. A study on the improvement of the tire force distribution method for rear wheel drive electric vehicle with in-wheel motor. IEEE/SICE International Symposium on System Integration, 2012, 16(18): 390-395.
[4] LU Dongbin, OUYANG Minggao,GU Jing, et al. Torque distribution algorithm for a permanent brushless DC hub motor for four-wheel drive electric vehicles. Journal of Tsinghua University(Science and Technology), 2012, 4(52): 451-456.
[5] 李刚,李宁,段敏,李贵远,申彩英.基于Simulink的四轮轮毂电机电动汽车仿真模型开发[J].辽宁工业大学学报(自然科学版),2012,32 (03):185-189.
[6] 李刚.线控四轮独立驱动轮毂电机电动汽车稳定性与节能控制研究[D].吉林大学,2013.
[7] 王耀辉,强天伟.PID控制原理简析.洁净与空调技术,2013(3): 79-82.
