基于EMD算法的机电系统故障诊断与辨识技术研究
2020-10-28张垚,王巧,洪峰,丁娟
张 垚,王 巧,洪 峰,丁 娟
(1.中国西安卫星测控中心,陕西 西安 710043;2.宇航动力学国家重点实验室,陕西 西安 710043)
0 引言
天线系统作为雷达测控、卫星通信、遥感接收及深空探测等多类型航天地面装备中典型的机电一体化设备,其运行的可靠性和关键部件一直以来都是研究的重点领域。文献[1]通过对电机电枢电流信号的时域分析,实现直流电机转子故障的检测目标。文献[2]提出了基于核主元分析的反向传播神经网络技术,采用经验模态分解提取非线性特性,解决齿轮泵故障诊断的方法。文献[3]采用基于信号分析方法、智能决策和软件技术的综合故障诊断技术,快速检测自行火炮系统故障,降低人员维修维护难度。文献[4]建立了测控系统永磁直流电机简化模型,通过解调信号归一化幅值及三相电流相位差获取定子不对称故障特征,实现电机设备的故障辨识与定位。上述方法对提高机电系统的故障诊断技术提供较好的借鉴。但对卫星地面站天线系统而言,受分布地域、外界环境和运行特点等方面的约束,要实现快速故障诊断、健康评估与辨识定位还是存在较大难度。文献[5]对机电一体化系统的故障特点及故障诊断方法进行了分析梳理。在此基础上还包括传动轴承、旋变等转动部件的结构磨损,传动机构、馈源馈线、滑环及卷绕机构的无冗余备份机构等风险点,都是造成天线机电系统可靠性降低的重要因素。文献[6]从系统建设的角度出发,提出构建离线与在线的综合状态监测方式,集信号采集、分析处理以及隔离定位的综合故障诊断手段,并利用远程网络与虚拟仪器技术作为趋势预测的辅助工具。
针对卫星地面站天线机电系统可靠性运行管理难点问题,提出了一种面向复杂天线机电系统的故障观测与辨识算法,从提高系统故障检测效率、改进故障辨识算法方面着手,提升系统故障诊断与辨识能力,为后续开展综合健康管理系统提供技术途径。
1 机电系统故障观测模型设计
结合直流电机系统机电特性,在带负载情况下的机械方程可表示为:
(1)
(2)
考虑电机电气特性引入的约束方程为:
Rai(t)+Keω(t)=αu(t),
(3)
式中,i(t)为电机绕组中当前电流值;u(t)为电机输出电压;θ(t)为电机轴当前角度;ω(t)为电机转子当前转速;b为电机轴与负载之间摩擦系数;J为电机轴与负载的惯性矩;Ki为回转矩常数;Ra为电机的电枢电阻;Ke为反电动势常数;α为扩增常数;R为电机负载。
在不考虑电气时间常数及电枢电感的条件下,正常状态下的机电系统模型状态空间方程可表示为:
(4)
(5)
当机电系统发生故障时,可通过检测电机系统的执行器的状态方程的变化情况实现状态的异变检测,通过状态估计器实现故障辨识与判定。
机电系统力学方程为:
(6)
式中,Ms为弹力矩;Mm为电磁力矩;J为电枢惯量。
机电系统电学方程为:
(7)
式中,uin为施加电压;i为电枢电流;ψ为磁通量;θ为位移;R为电阻。
由xi,xz,xf对部分变量进行替换:
那么,机电系统的力学与电学模型可表示为:
(8)
(9)
假设x=[i,θ,ω]T为状态向量,y为输入向量,u=[uin,Ms(0)]T为输入变量,构建机电系统执行器的系统状态方程为:
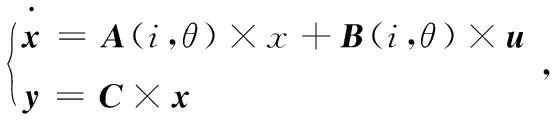
(10)
式中,A(i,z),B(i,z)为控制矩阵;C=[1 0 0];
可得,机电系统标准模型的状态方程通过设计状态观测器进行数据分析,实现故障辨识与定位。
基于卡尔曼滤波时变线性递归特性,假设已知具有未知输入的等价增广状态系统[12]为:
(11)

估计器的设计采用鲁棒2级卡尔曼滤波器[7]来解决,经过一系列操作,可获得鲁棒2级滤波器为:
(12)
(13)

(14)
(15)
(16)
(17)
(18)
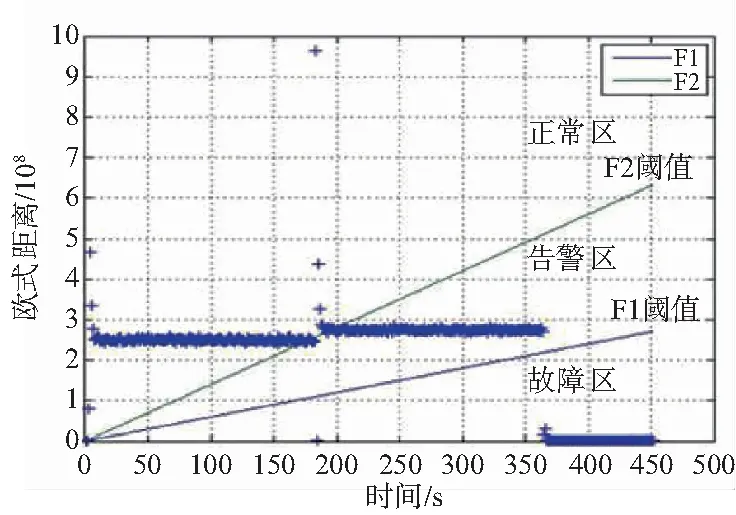
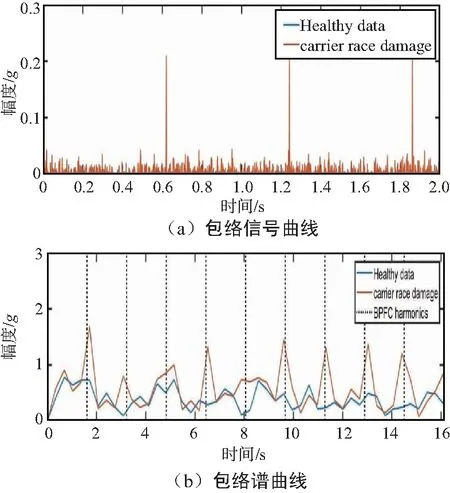
为了进行故障检测与隔离,根据估计的速度状态信息,利用欧氏距离法,可以将部件进一步进行故障区域划分,分别定义了执行器电枢在时间t1和t2(t1 (19) (20) 根据执行器电枢的位移和动能方程,可以得到执行器电枢的欧氏距离为: F2=(Δz)2+(ΔE)2。 (21) 根据式(19)的计算结果和式(20)可以对执行器的故障进行检测: (22) 式中,F1,F2分别为t1与t2时刻的欧氏距离,对正常状态进行细化得到健康状态。 为有效提取机电系统的故障特性,采用经验模态分解(EMD)算法利用信号自身的局部特征信息进行自适应分解,得到一系列具有不同时间特征尺度的固有模态函数分量,克服了全域波变换中基函数容易选取不当的问题,能够进行自适应的多分辨率分析,因此能够得到更优的变换结果。 EMD算法可将原始信号分解为本征模函数和残余量,并在不产生损失和失真的情况下,完成原始信号特性量的重构。该方法使得高低频率能在不同的时间同时存在,很好地契合了轴承等机械结构振动信号非线性、非平稳的特点,达到了利用信号本身的特征把各种波动模式提取出来的目的。 在实际的信号分析中,一次分解计算所获取的结果很难满足具体的本征模函数要求。而为了达到所需目标,通常需要一个迭代分解,多次分解计算,逐步分解出达到要求的信号分量。 对于x(t)∈R1,分解的过程为[8-9]: ① 首先通过计算找到所有局部极大值点和极小值点。 ② 利用极大值点,采用插值或拟合方法计算信号上包络emax(t),并利用极小值点计算出信号的下包络emin(t),计算包络平均值: (23) ③ 计算信号x(t)与包络均值的差值: h1(t)=x(t)-em(t)。 (24) ④ 判断h1(t),如果满足本征模函数的2个条件,则认为h1(t)为第1个本征模函数;否则,就将h1(t)当作原始序列,重复①~③再判断结果是否满足本征模条件,若不满足,则重复循环k次,得到h1k(t)=h1(k-1)(t)-emk(t),使得h1k(t)满足本征模条件,记c1(t)=h1k(t),使得h1k(t)满足本征模条件,记c1(t)=h1k(t),则为x(t)的第1个本征模函数[10]。 ⑤ 将c1(t)从x(t)中分离出来,然后再将余数r1(t)=x(t)-c1(t)当作原始序列。利用新得的原始序列重复以上步骤,得到后面的信号分量,记为c1(t),c2(t),…,cn(t),最后剩下原始信号的余项rn(t)。 ⑥ 分解后原始序列可表示为: (25) ⑦ 当分解求得的最后一个本征模函数cn(t)或剩余分量rn(t)变得比预期小时,或者剩余分量rn(t)变成单调函数时,可控制分解过程结束。 EMD信号分解流程如图1所示。 图1 基于EMD算法的信号分解辨识流程Fig.1 Signal identification process based on EMD algorithm 为了保证本征模函数保存足够的物理实际的幅度和频率,基于筛分准则,通过计算2个连续的处理结果之间的标准差的大小来实现: (26) 式中,T为信号的时间跨度;hk-1(t),hk(t)为经验模态分解过程中2个连续的处理结果;Sd通常取值0.2~0.3[11],如果计算得到Sd小于规定的取值,就判定满足停止条件,筛分过程停止。 (27) (28) 根据机电系统故障模型和观测器模型,在机电系统正常工作过程中,人为植入电机滚动保持架磨损故障,对所给故障数据通过程序仿真,仿真结果如图2所示。 图2 机电系统运行工况变化曲线Fig.2 Condition curve of electromechanical system (1)故障检测过程 由图2可以看出,利用该故障模型与卡尔曼估计器可实现对观测对象的实时跟踪与估计。在183 s,电流、电压与速度均发生了剧烈变化,说明系统工作异常,有故障发生迹象。当持续到365 s时,电流、电压与速度值突变为零,说明由于故障的影响,系统已停止工作。 系统可通过构建的故障观测模型,较为准确地跟踪系统的运行状态。根据设备电气特性,选取健康状态等级的边界阈值F1=60,F2=140,利用式(19)~式(22)计算设备健康状态等级的变化情况,如图3所示。 图3 机电系统健康状态评估曲线Fig.3 Health status curve of electromechanical system 由图3可以看出,在183 s时刻以前,被观测对象工作正常;在183~365 s时刻,被观测对象出现告警,持续到365 s时,被观测对象因故障停止工作。 (2)故障辨识过程 机电振动传感器检测数据如图4所示。 图4 机电振动传感器检测数据Fig.4 Detection data of electromechanical vibration sensor 根据天线机电系统机理及关联模型,可能造成设备故障的主要原因包括轴承松动、轴承内/外圈磨损、保持架磨损和滚子磨损等。由于机电系统不同部位发生故障时,其故障信号频率的差异,故其在振动信号上的反映也不尽相同。为进一步分离故障点,提取设备运行告警期间(183~365 s)部分时段的振动传感器检测数据,并以保持架磨损故障为例进行故障辨识(其他类型故障可参照此方法)。 根据电机滚动轴承保持架的运行机理及特征频率的本征模函数[12]: (29) 式中,m为滚子个数;fn为轴的转频;do为滚子直径;D为轴承节径;α为轴承压力角。 通常,轴承发生疲劳剥落损伤时,在轴承运转中会因为碰撞产生脉冲,其碰撞频率等于滚动体在滚道上的通过频率,采用EMD算法对故障信号进行信号包络谱分析,如图5所示。 图5 包络谱分析比对Fig.5 Comparison of envelope spectrum analysis 由图5可以看出,通过输入数据与包络信号均值比较后得到的IMF分量,经分解、判断后获取振动信号的低频分量,并将其与故障特征频率的多次谐波的分布情况进行比对。经分析,可看到故障时振动信号的包络谱曲线存在周期跳动现象,并与轴承保持架故障频率BPFC及其谐频点存在较强的吻合度,可判定因保持架磨损,从而发生异常振动现象,进而导致机电系统停止运行故障。该方法对于微小故障特征的快速辨识提取,具有较好的效果。 针对复杂天线机电系统的力学与电学特性,通过构建机电系统故障观测模型,采用基于EMD算法的故障辨识技术,实现了对复杂系统运行状态的实时监测、趋势估计、故障辨识以及健康等级判定,为后续开展系统级综合健康管理提供了技术支持。需要注意的是,由于复杂系统不同故障类型的故障函数不尽相同,产生的影响程度也有所差异,在进行故障辨识及健康等级判定时,模型的准确性和边界阈值选取的合理性尤为重要。2 基于EMD算法的故障辨识方法

3 测试验证




4 结语