一种基于电磁吸附的爬壁机器人的设计与研究
2020-10-27张加润李占贤
张加润 李占贤
摘 要:本文以罐体、船舶类等大型金属设备表面的除锈、清洗、打磨为背景,研制出了一种基于电磁吸附的爬壁机器人,完成了传动机构、腿部结构和吸附装置的具体设计。在明确相关构件尺寸参数的前提下,利用SolidWorks软件绘制了机器人的三维模型。介绍了其在爬行过程中腿部机构的动作原理。
关键词:爬壁机器人;结构设计;运动学分析
1. 引言
众所周知,罐体、船舶类等金属设备的表面经常存在着除锈、清洗、打磨、焊接等相关作业需求[1-3],这些工作在以往都是由人工来完成,经常采用搭载吊篮或腰系绳索等的工作方式,工作强度高、效率低,并具有一定的危险性。因此,一种能够代替人工进行相关作业的爬壁机器人的研制需求变得极为迫切[4-6]。
2. 爬壁机器人的整体设计方案
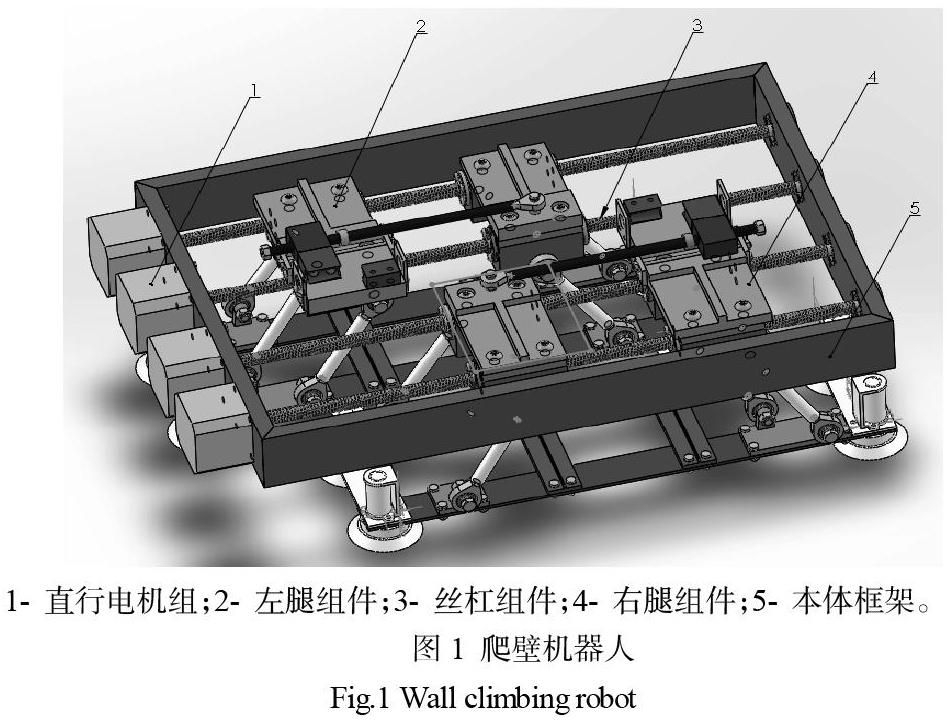
如图1所示,为爬壁机器人的基本模型,主要由左腿组件、右腿组件、丝杠组件、直行电机组和本体框架构成。四个电机等间距并排固定在机器人框架的一端,丝杠的一端通过联轴器与电机连接,另一端与机器人框架的基座刚性连接,左侧两滑块与左侧两丝杠配合移动,右侧两滑块与右侧两丝杠配合移动。
电机、转动丝杠和滑块组成机器人的驱动装置。在图1中,四个电机从上到下依次表示为OF、OB、IF、IB。其中左腿所连电机OF、OB驱动左腿上两滑块的移动,右腿所连电机IF、IB驱动右腿上两滑块的移动。前、后两滑块的一组对角孔设置内螺纹,另一组设为通孔。
腿部组件是爬壁机器人的动作执行装置。为了保证机器人爬行过程结构紧凑,腿部组件采用类似等腰梯形的机构,对称排列在机器人本体框架的左右两侧。通过电机以不同转速带动丝杠的转动,可以调节前、后滑块之间的距离,从而实现机器人的抬腿与落腿动作。
2.1 传动机构的设计
传动机构决定着机器人的运动精度,为了确保机器人作业的效率和质量。传动机构的设计尤为重要。
其中,该机器人的传动机构主要由四个电机组、联轴器、本体框架、丝杠和滑块组成。四组传动机构并排放置,在本体框架的左、右两侧分别安装前、后两个滑块,该传动机构可以将电机的转动转化成滑块的直线运动。其中,当包括滑块在内的整个右腿机构在吸附力的作用下与壁面保持相对静止时,电机的转动便实现机器人本体框架相对滑块(也即壁面)的移动,即机器人完成了沿壁面的爬行。
2.2 腿部结构的设计
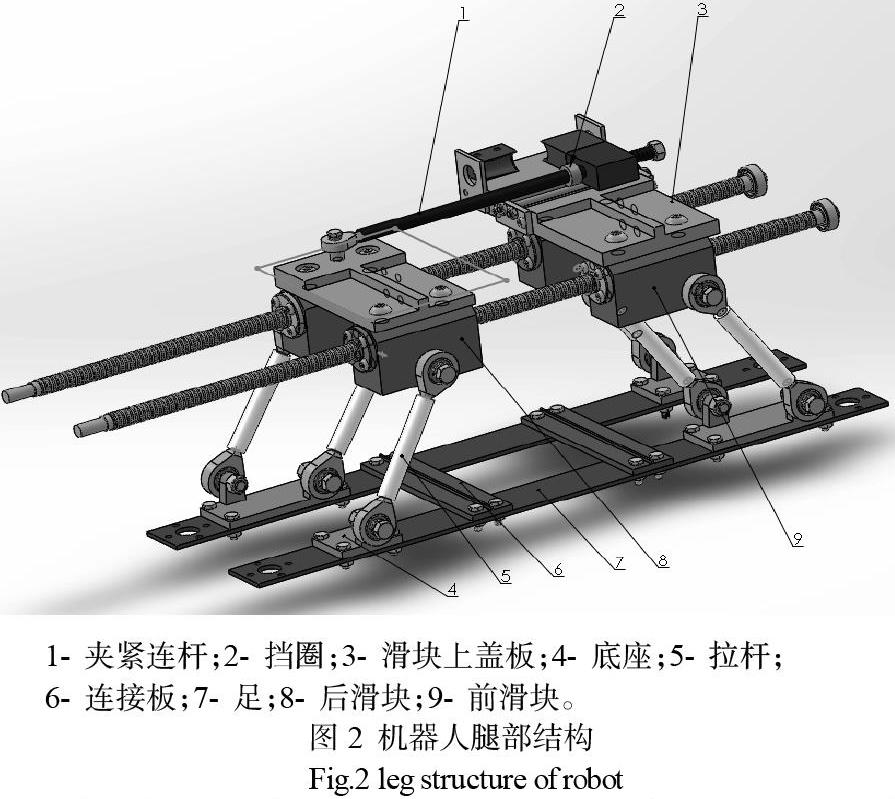
根据机器人作業环境的不同,其行走机构的设计也不尽相同。本文提出了一种并联足式爬壁机构,其设计如图2所示。
腿部组件主要由拉紧连杆、挡圈、连接板、推拉阀、吸盘、电磁铁、足部、前、后滑块、滑块上盖板等组成。每条腿上装有六个拉杆,双拉杆与单拉杆交替排列并成对角分布。其中,与单连杆相连的滑块孔内设有内螺纹,与丝杠形成螺旋副,起传动作用,与双连杆相连的滑块孔内不设螺纹,不与丝杠发生作用,形成移动副。此外,前、后滑块通过夹紧连杆连接。
通过控制两条丝杠的转速不同可以改变两滑块之间的距离,从而使机器人实现抬腿或落腿动作。当两滑块之间距离增大时,足部逐渐下落并直至与壁面接触;当两滑块距离减小时,足部抬起并向前移动。因此,通过分别控制四个直行电机的转速,配合电磁铁及时的通、断电,可以使机器人左、右两足依次交替吸附在壁面上,从而实现可机器人的匀速行走。
2.3 吸附装置的设计
吸附装置主要由垫板、推拉阀和吸盘等组成。其中,每个足部由两个平行细长板组成,二者通过一对并排的连接板相连。在细长板的每端,分别安装一个推拉阀,在推拉阀的正下方安装吸盘,在吸盘内部装有电磁铁。拉阀装置具有体积小、性能可靠,动作灵敏的特点,可以频繁的完成周期性启停工作,适合机器人腿部机构的运动特点。同时,该装置不容易发生损坏,寿命长,可以长期使用。
3. 结论
根据爬壁机器人作业的环境和内容,结合机构设计原则,提出了一种运行平稳、负载较强、灵巧度好的并联足式爬壁机构,在对关键技术进行选择的基础上,完成了机器人整体方案的设计。该机器人的研制解决了人工作业劳动强度大、效率低、危险性高的问题,对室内、外各种大型金属设备表面的除锈、喷漆、清洗等相关作业具有很大的实用价值。
参考文献:
[1]朱光辉. 新型爬壁机器人的研制[D]. 重庆:重庆大学, 2016.
[2]唐东林, 袁波, 胡琳, 等. 储罐探伤爬壁机器人全遍历路径规划方法[J]. 工程设计学报, 2018, 25(03):253-261.
[3]王志刚, 张轲, 罗志锋, 等. 爬壁机器人焊缝跟踪过程中的焊缝检测与识别研究[J]. 热加工工艺, 2018, 47(01):210-213+219.
[4]胡绍杰, 彭如恕, 何凯, 等. 履带式爬壁机器人磁吸附单元优化设计与实验研究[J]. 机械与电子, 2018, 36(01):69-74.
[5]郝月娇. 风电塔筒清洁机器人的结构设计与分析[D]. 兰州:兰州理工大学, 2019.
[6]陈彦臻, 胡以怀. 船体清洗机器人的开发现状与展望[J]. 船舶工程, 2017, 39(10):62-69.
