单相全桥逆变器建模及复合控制研究
2020-10-26尹成斌冯雪姣
尹成斌,冯雪姣
(1.海军92771部队,山东青岛 266405;2.湖北交通职业技术学院,武汉 430079)
0 引言
随着工业体系全自动化的发展趋势,自动化生产及智能管理系统不断发展,对设备应对突发情况的能力要求也越来越高。不间断电源装置(UPS)顺应时代发展的应运而生,其需求日益增加[1-3]。而逆变器作为不间断电源的核心部件,是其能否正常工作的关键因素。对输出逆变器的控制直接关系到不间断电源系统的输出特性,故对逆变器的控制是不间断电源系统研究的重难点。汪玲等[4]针对单相全桥逆变器工作中存在因谐振因素影响造成输出不稳定的问题,设计了含有电容电流反馈的有源阻尼控制策略,通过仿真及试验研究验证了该方案的正确性。陈蕾[5]针对传统脉宽调制控制策略难以平衡开关损耗和谐波失真之间的矛盾,提出了基于遗传算法的开关序列优化控制策略。刘锐等[6]以单相全桥逆变器为对象,将PID 控制与灰色控制相结合,提出了一种基于模型的灰色PID控制算法。研究结果表明该方法能够有效抑制外界干扰,具有良好的鲁棒性和动态响应性能。刘述喜等[7]研究了一种基于虚拟矢量的电流电容与并网电流的双闭环控制策略。徐乃珺等[8]针对传统边界电流零电压控制策略引起的导通损耗增大问题,将零电压和零电流的混合软开关结合提出了一种混合控制方法。
在理想状态下,可将逆变器等同于线性功率放大器,当负载为线性负载时,可通过使用开环控制方法来实现系统稳定的正弦输出。但在现实中,逆变器的输出滤波电路具有感容特性,且系统负载是非线性的,从而造成系统输出发生畸变。为了能够改善系统输出的动态性能,本文首先建立了单相全桥逆变器模型,在此基础上将无差拍控制器与重复控制器相结合,设计一种对逆变器可行的复合控制策略,最后通过仿真验证该方法的有效性。
1 逆变器建模
本文研究的两电平单相全桥型逆变器结构图如图1 所示,主要包含逆变电路及输出滤波电路两部分。

图1 单相全桥逆变器的结构图
1.1 逆变电路建模
如图1所示,逆变电路由缓冲电路和T1~T44个功率管组成,每桥臂上有2个功率管。正常工作时,两桥臂上同时刻只能有一个功率管工作,另一个断开。则两桥臂的开关函数可表示为:

逆变桥输出的脉冲电压幅值为Ud,则其输出电压uin表示为:

利用状态空间平均法科得出开关函数的平均值:

式中:M为调制比。
综合以上分析可得逆变电路的等效模型为:

由式(4)可得,逆变电路模型可简化为一个放大器。当M<1时,逆变电路的输出脉宽随着调制比的增大而增大,其数学模型可等效为一个比例放大环节。
1.2 输出滤波电路建模
如图1 右侧所示,为了提高逆变器输出电压的稳定性及抗干扰性,在输出端使用LC低通滤波器,用来滤掉电路中的高次谐波。输出滤波电路中,一般而言电容的等效电阻忽略不计,电感L 的等效电阻表示为r,输出电压表示为uin(t),负载电流用io(t)表示。
uc(t)为电容两端的电压,iL(t)为电感中的电流,则系统的状态方程可表示为:

则可得:

从而得到式(7)、(8),输出滤波电路的数学模型框图如图2所示。
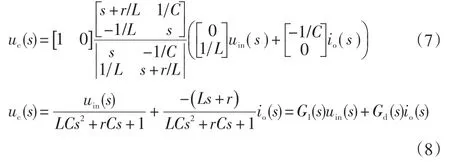

图2 输出滤波电路模型图
2 复合控制算法设计
对逆变器的控制目标是使得输出电压波形畸形较小,由现代控制理论可知,若采取闭环控制结合相应的数字控制,对控制对象逆变器而言,控制过程参数能够得以校正,这样就能达到改善系统的动态性能。目前已存在多种控制方法,重复控制由于其具备良好的波形控制,使用较为广泛,其原理是基于内模原理的控制方法,优点是能使得逆变器具有较低的稳态输出波形,鲁棒性较好,但其主要缺点是动态性能较差。无差拍控制是一种特有的数字控制,其原理是通过添加精准计算的控制量来纠正一个采样周期内被调量的偏差。无差拍控制显著的优势是动态响应快,缺点是系统的鲁棒性差。本文结合重复控制和无差拍控制,取长补短,设计了一种复合控制算法。
无差拍控制取样原理如图3所示,采样周期表示为T,逆变器的输出值表示为+E和-E,ΔT(K)表示第K个周期方波的调节宽度,同理ΔT(K+1)表示第K+1个周期的宽度。采样周期内的电压值由该时刻采样值及下一时刻的参考值来决定。

图3 无差拍控制采样结构图
将式(5)离散化可得:

由式(9)可求得

式中:uc(k)、iL(k)和io(k)为已知量,代表着第K时刻的采样值。滤波电路电容C 两端的电压即为系统输出电压,当采样周期足够小时,可近似认为下一时刻(K+1)的电压值等同于该时刻(K)的电压值。
为了提高重复控制系统的参数跟踪速度,往往在应用中加入前馈控制环节,其结构如图4所示。前馈重复控制结构中包括参考信号r(k),误差信号e(k),延时环节z-N,补偿器C(z)=Krz-kS(z),其作用是抵消系统控制对象产生的谐波峰值,校正低频增益为1 或略小于1,增强反馈通道的高频衰减。滤波器Q(z),其作用是提高系统的稳定性。P(z)为系统中的被控制对象,d(k)表示系统的扰动信号,y(k)表示系统输出。

图4 重复控制原理图
由图4可得,系统的传递函数可表示为:

误差e(z)可表示为:

联立式(11)、(12),得到e(z)与指令r(k)、扰动d(k)的关系:
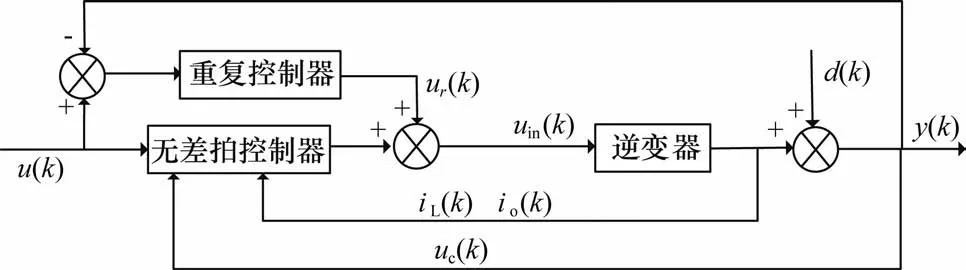
图5 复合控制原理图

图6 仿真模型及波形图

重复控制系统的控制方程为:

本文设计的复合控制原理如图5 所示。重复控制将重复控制良好的静态特性与无差拍控制良好的动态特性相结合,使系统的输出具有良好的动静态特性。
3 仿真研究
为了论证控制策略的有效性,利用Saber仿真软件进行电路计算仿真。Saber仿真软件具有比较全面的模型库,对电路的参数可做不同设置来进行比较分析。根据单相全桥逆变器的模型及复合控制算法,本文以Saber仿真软件的通用模型为基础,建立逆变器主电路的模型,搭建复合控制器仿真模型,并进行仿真分析。逆变器的仿真模型及仿真曲线如图6所示,图6(a)为控制器的仿真模型,图6(b)中曲线1 为输出信号,曲线2表示系统的给定信号,曲线3表示系统中存在的干扰信号。通过仿真波形图可看出,系统在较大的扰动干扰信号下,输出信号能够很好地跟踪给定波形信号。因此说明本文所设计的复合算法有效。
4 结束语
本文针对不间断电源逆变器使用较为广泛的单相全桥型拓扑结构,建立逆变电路与输出电路的数学模型,在此前提下,利用无差拍控制能够改善系统的动态特性和重复控制可提高系统稳态性能的优点,设计了一种将两种控制方法相结合的复合控制策略,从而达到使得逆变器的输出电压波形畸形较小的目的。最后通过Saber仿真软件对复合控制算法进行了仿真研究,研究结果表明在干扰存在的情况下,逆变器的输出信号能够很好地跟踪给定波形,说明了算法的有效性。
