基于CAN总线的动车组集装器自动装卸系统
2020-10-23佘鹏吕文俊刘文龙
佘鹏,吕文俊,刘文龙
(1.中车青岛四方机车车辆股份有限公司,山东 青岛266111;2.湖北韵生航天科技有限公司,湖北 襄阳441021)
1 引言
随着国内物流运输需求的不断提升和高速铁路运输里程的快速增长,给铁路快捷货物运输系统带来了新的巨大的市场潜力[1]。国外对货物快捷运输研究较早,法国主要为Sernam200包裹列车和TGV邮专列。德国采用客货分时段混行,城际包裹运送业务采用DBSgss-y703型4列车(一种专用的集装箱列车)。北美、澳大利亚铁路快捷货车主要为120km/h速度级,主要车辆为:双层集装箱车、单层集装箱车、驮背运输车,如美国的Thrall-TA型5单元单层关节式集装箱平车、Lopac II型双层关节集装箱平车[1]。目前,国内在铁路快捷运输方面,主要以普列为主,装载方式由列车外部设备或人工将物品或货物装载到列车车厢,再通过人工将需要固定的货物固定好。列车本身不具有集装器的自动装卸功能,普遍机械化、自动化程度不高。近年来,随着动车组运营的日益成熟及集装器的标准化,动车组以其运行速度快、周转效率高的特点,作为快捷货运的新兴力量正在成为趋势。
2 CAN总线概述
CAN(Controller Area Network,CAN)是ISO国际标准化的串行通信协议。1986年,德国电气商博世公司开发出面向汽车的CAN通信协议。此后CAN通过ISO 11898及ISO 11519进行了标准化,在欧洲已是汽车网络的标准协议[2]。CAN的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持[2]。
3 自动装卸系统设计
3.1 结构设计
对于动车组实现集装器的自动装卸,首先要满足集装器的标准化,这里以航空LD3集装器和特种货运集装器为对象,设计了一套自动装卸系统,能够完成集装器的自动装卸。系统包括支撑单元、电动导向单元、电动传输单元、电动锁定单元及中央控制单元。支撑单元作为集装器传送过程中的支撑,需要采用滚动摩擦的形式,减小集装器在传送过程中的阻力。电动导向单元实现集装器运行及转向过程的导向,电动传输单元为集装器传送提供传输动力。为适应不同重量的集装器,电动传输单元采用摩擦的形式提供动力。电动锁定单元将传送到位的集装器牢牢地固定在车厢内。中央控制单元控制各单元部件协调工作,共同完成集装器传送任务。
3.2 控制系统设计
系统采用CAN总线结构的数字化控制方法,利用CAN总线具有数据传输速度快、数据传输的距离远、抗外界干扰能力强的特点。CAN总线控制结构如图1所示。手持终端通过无线或有线与主控箱相连,给主控系统下达操作指令,主控系统通过总线与所有的电气部件相连,根据下达的操作指令,给相应的电气部件发送工作指令,电气部件根据工作指令进行工作,共同作用完成集装器的装载和卸载功能。电动转运装置的电气系统PDU、电动导向部件、电动锁定部件作为系统节点,挂接在CAN总线上,每个电气部件分配相应的地址,中控通过总线对其访问和控制。
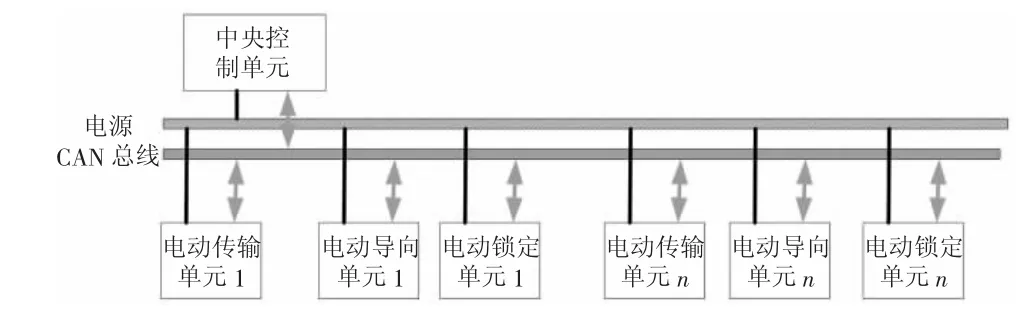
图1 CAN总线控制结构图
3.3 自动装卸逻辑设计
对集装器在车厢内的装载过程进行研究,采用流水装载结构,保证了集装器装载的效率。同时配合传感器感知集装器的位置,保证集装器装载过程中的安全性。系统的装载和卸载逻辑如图2和图3所示。
3.4 试验结果
根据系统的工作原理,将电动传输单元、电动锁定单元、电动导向单元、支撑单元及中央控制单元按照集装器的尺寸进行组合布置,组合成为一套完整的自动装卸系统。经过测试,该系统能够实现集装器的自动装载和自动卸载功能,可以在3min内完成一节车厢的装载或卸载,各工作单元安装更换简便,工作可靠。
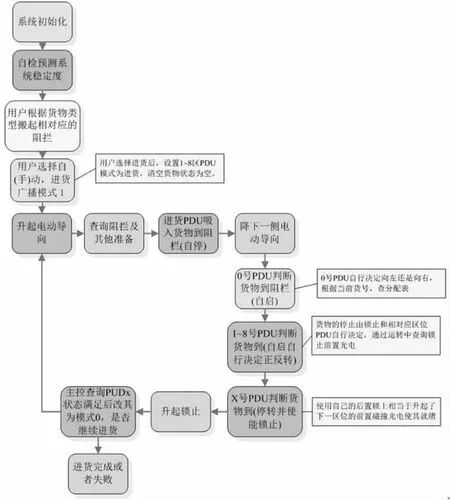
图2 装载逻辑流程
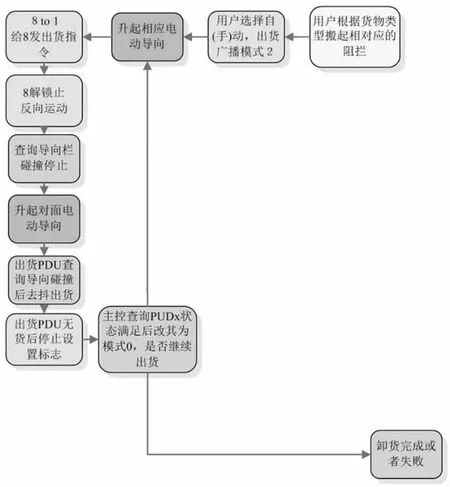
图3 卸载逻辑流程
4 结语
基于CAN总线的控制系统能够满足自动装卸系统的控制要求,能够可靠地实现对各个控制单元间的通信,能够实现航空LD3集装器和特种货运集装器的自动装卸。缩短了动车组停站时间,减少了集装器装卸对人员的需求,提高了快捷货运的运营效率。