基于单片机的电磁循迹小车的设计与应用
2020-10-21赵伟于九龙张瑞
赵伟 于九龙 张瑞
摘 要:本文为介绍济南大学农夫山泉车队在山东省智能技术应用大赛过程中的工作成果。利用通电导线产生的电磁场对智能车进行引导,相比传统的循迹该种循迹的优点主要体现在磁场信号具有很好的环境适应性,不受光线、温度、湿度等环因素的影响。智能车的硬件平台采用带STM32F103C8T6单片机,利用电压采集模块经过AD转换传回数据,再和速度检测模块进行综合计算进而控制舵机模块、电机驱动模块来达到控制小车的效果。
关键词:智能车,电磁循迹,环境适应性,PID控制
一、系统设计方案
(1)总的设计方案分为硬件和软件方案,此文中主要分析部分硬件模块的设计及相关物理模型的分析,对于具体的c语言编程细节本文不做详细描述。通过传感器检测到电压采集模块左右两端和中间传感器之间的压差,将采集的压差传到STM32F103单片机,由 PWM 发生模块发出 PWM 波,分别对舵机和直流电机进行控制,完成智能车的转向、前进和制动等功能。
(2)全部设计主要有下面的功能:
①安装电源检测模块,对智能车的电源电量进行实时检测并通过OLED显示屏显示;
②通过车头的传感器将磁场信号转化为电压信号,再将模拟的电压信号转化为数字信号;
③后车轮装有编码器能实时检测小车的行进速度;
④小车能在直道、连续的弯道、环形道路以及低坡度的桥上快速稳步前进;
⑤小车具有制动功能,在检测到特定的磁场时会立即刹车。
二、硬件系统中主要模块的设计
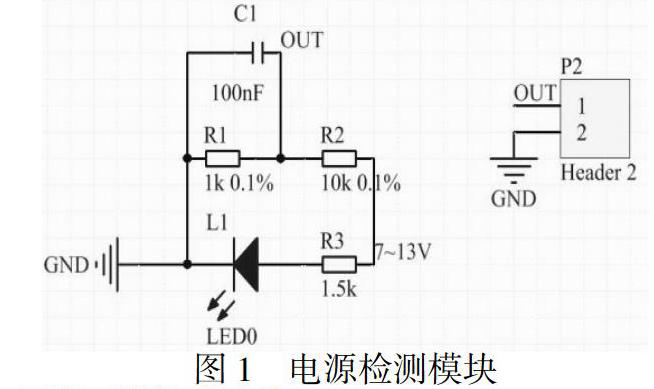
(一)电源检测模块
本模块使用高精度电阻分压的方式对电池电压进行测量,一般航模电池的电量是和电压相关的,比如 3S 满电的时候是 12.6V,过放(电压低于 9.6V)必然导致电池永久过放,所以我们有必要通过监控电池电压的变化,近似表示电池的电量,在电池电量比较低的情况下,提醒我们充电。模块的原理图如图1所示,电池电压经过电阻分压,衰竭为原来 的 1/11 之后,送单片机 ADC 检测,以 12 位 ADC 的 STM32 举例,Get_Battery 为 ADC 采集的变量,那么很容易计算得到电池的电量 Battery_Voltage=Get_Battery*3.3*11/4096(单位:V)。
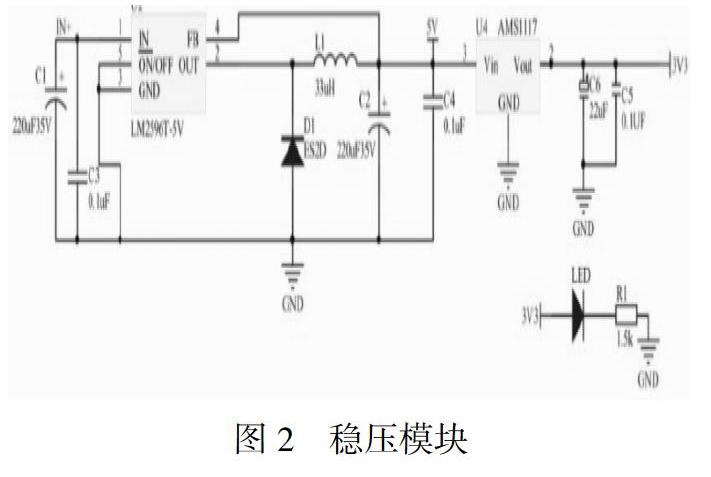
(二)稳压模块的设计
一般的小车使用2s或者3s航模电池供电,而系统板是5v供电的,所以我们需要降压模块进行12v到5v的电压转换,这里使用的芯片是LM2596S-5.0,下面是我们根据芯片手册设计的外围电路如图2所示。
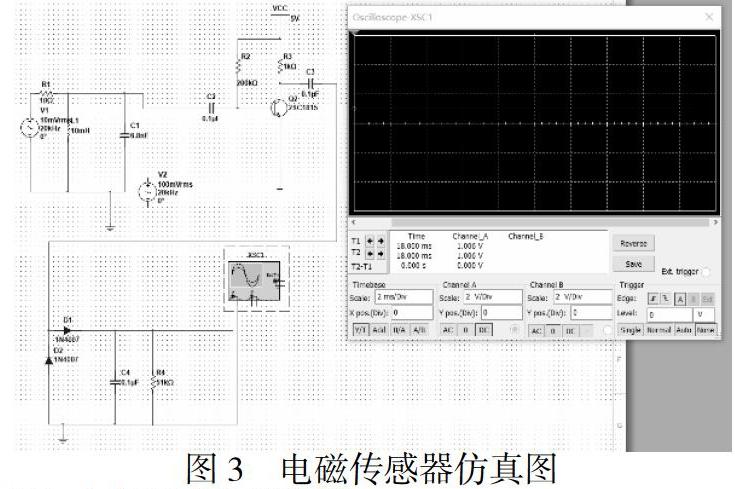
(三)电磁传感器模块的设计
此设計利用LC谐振回路选出特定频率的电磁波,再通过小功率三极管进行信号放大,最后通过倍压检波电路将交流电转成直流电输给单片机进行模数转换,模块仿真图如图2所示。
(四)小车运动轨迹建模
小车在转弯时,后轮的内轮和外轮形式的距离不同,行驶的时间却一样,因此后轮之间存在差速问题,传统的汽车使用机械差速器完成差速,而我们的小车采用两个电机直接驱动后轮,不需要机械差速,使得机械设计更加简单,但在电控方面就更复杂一些。设舵机控制转角为θ,车前进速度为v,前后轮中心距离为L,后轮距离为T,后转弯内侧轮速度为v1,后转弯外侧轮速度为v2,小车转弯角度原理图如图3所示。
因为角速度的一致性,根据运动关系分析得知:v/R=v1/R1=v2/R2、tanθ=L/R、R1=R-0.5T、R2=R+0.5T,由以上几个式子可得:v1=v/R*R1=V*(1-T* tanθ/2L)、v2=v/R*R2=V*(1+T* tanθ/2L)。在软件编程中采用PID算法对上述公式中得到的数据进行处理,通过调节PID参数就可以让小车平稳运行,具体参数的调节需要根据不同情况灵活改变。
(五)速度检测模块
编码器是一种将角位移或角速度转换成一连串电数字脉冲的旋转式传感器,从检测原理上可分为光电编码器(光学式)和霍尔编码器(磁式),本小车采用霍尔编码器进行测速。霍尔编码器由霍尔码盘和霍尔元件组成,霍尔码盘与电动机同轴,电动机旋转时霍尔元件检测输出若干脉冲信号,为判断转向,一般输出两组存在一定相位差的方波信号,在本车中后轮每转动一圈输出约390个方波,霍尔编码器如图4所示,这是一款增量式输出的霍尔编码器,有AB相输出,可测速也可辨别方向,只需给编码器的电源5v供电,在电机转动时即可通过AB相输出方波信号,改编码器自带上拉电阻,无需外部上拉,可以直接连接到单片机IO口读取。
三、测试结果
按照设计,小车最后的成品如图6所示,比赛时小车能够快速通过直道、弯道、十字路口等多种类型赛道,完成60m长的赛道共用时26秒。
四、结束语
电磁循迹是比较新颖的循迹方法,不受光线、温度、湿度等环境的影响,循迹精准高速,虽然现在只在比赛中出现,但这种方式具有广阔的前景,未来在快递、仓库物流等方面将会发挥巨大的作用。
参考文献
[1] 柯亨玉. 电磁场理论[M].北京:人民邮电出版社,2004,8 .
[2] 李仕伯,马旭,卓晴.基于磁场检测的寻线小车传感器布局研究[J].电子 产品世界 2009,12:41~43 .
[3] 张昊飏,马旭,卓晴. 基于电磁场检测的寻线智能车设计[J].电子产品世 界 2009,11:48~50.