基于多传感器融合的车载运动模型研究
2020-10-21王志杰
王志杰

摘 要:本项目旨在通过误差补偿技术提高INS单独使用过程中的精度,使车辆能在惯性导航系统单独作用下实现尽可能久的高精度导航,建立相应运动模型并对SINS误差特性进行分析。
关键词:多传感器;旋转调制技术;误差特性分析;Kalman
一、旋转调制技术
(一)介绍
对传统数据处理方法的研究中,意识到误差急剧发散的主要原因之一是由对加速度、角速度的积分操作导致的。由于安装时可能引入的安装误差,以及载体行驶时不可避免地在加速度测量值和角速度上引入噪声,最终演算结果与实际存在极大的误差。
(二)旋转调制技术原理
旋转调制技术通过将安装在旋转机构上,利用旋转机构带动 进行周期性的翻滚、旋转和停位运动,以改变其常值偏差沿导航坐标系的投影形式,进而抵消器件误差对系统各导航误差的影响。本文研究过程中将采用连续旋转策略,工作方式具备以下两个重要优势:(1)避免了转停过程中加速度突变对状态方程建模的不利影响。(2)通过连续旋转的的方式,可以将MIMU固定在车轮上,依附于车辆固有的旋转机构,无需附加转停器械。
(三)安装方法
选择惯性测量元件:JY61倾角仪6轴加速度计/陀螺仪模块
(四)数据处理
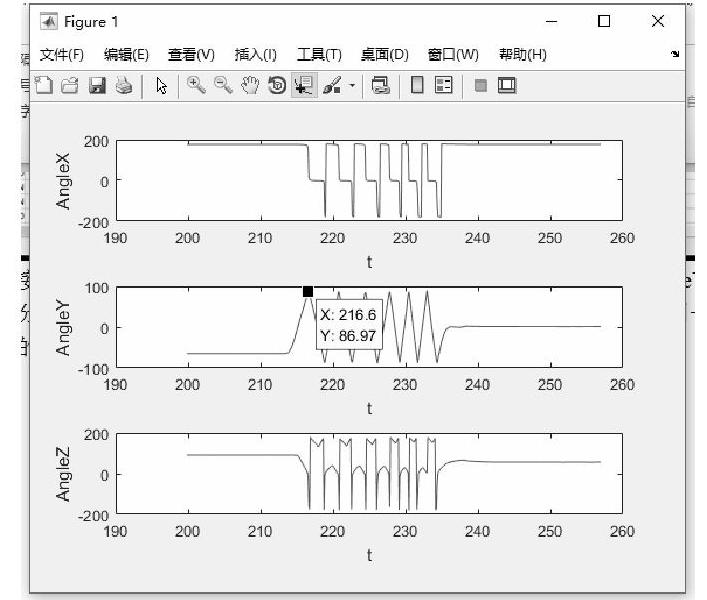
由图可见,由于车轮的旋转,导致x_s、z_s轴的测量数值呈现周期性变化,且理论变化范围是-180度到180度。AngelY可以直接与车轮旋转角度相关联,且其理论变化范围是-90度到90度,通过求任一时间微元内行进距离,即可求出任一时间点车辆的行驶路程,求路程的关键点在于准确得到任意时刻AngleY的相位变化。
二、Kalman滤波仿真
基于SINS误差解算方程、旋转调制技术思想,本文以速度、位置、姿态建立9维状态量,通过kalman滤波技术实现对加速度计测量数据与角速度测量数据的的融合,取得了较优的测量结果。
模拟环境如下:(1)车辆以加速度向东向作直线运动;(2)加速度计陀螺仪安装在车轮内侧,安装点距车轴0.5m;(3)初始状态下加速度计陀螺仪三轴指向与导航系(东北天坐标系)重合;(4)系统噪声为方差的白噪声,量测噪声为方差的白噪声。(5)模拟时长为2000s;
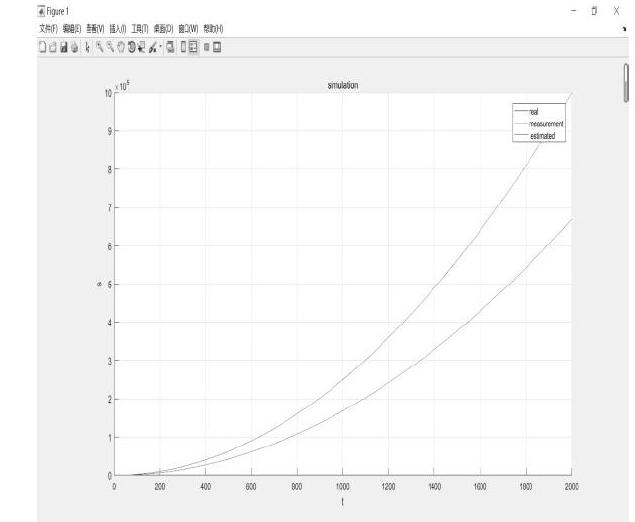
运行结果如下:
图中,灰色曲線为速度理论值,蓝色曲线为未作滤波处理组的速度计算值,红色曲线为经kalman滤波组的速度计算值。
真实值(灰色曲线)与kalman滤波预测值(红色曲线)间差距很小,旋转调制数据经由kalman滤波处理后与真实值差距很小;反观图1可以看到,当导航持续1000s时,真实值速度增加至500m/s,而仅做旋转调制未做kalman滤波处理的对比组速度增加至335.9m/s,与真实值存在极大冲突。
参考文献
[1] 刘建业.导航系统理论与应用.西安:西北工业大学出版社.2010.3
[2] 王秋滢.船用调制型惯性导航及其组合导航技术.北京:国防工业出版社.2017.3
