高海拔低压低氧实验舱模型建立及其控制方式研究
2020-10-21车守全卢剑锋王一达
车守全,卢剑锋,王一达,刘 柱
(贵州大学机械工程学院,贵州 贵阳 550025)
1 引言
低压低氧实验舱是模拟不同高度低压低氧环境的大型设备,用于航空设备检验、飞行员和高原军队人员训练、高原医学实验等,模拟高度通常在2500 米以上。在我国西部地区,大部分省份处在高原地带,高原急慢性病的研究关系着高原地区经济发展和民众健康水平[1-2],低压低氧舱为高原医学的研究提供了环境模拟。国内关于低压低氧舱的研究从21 世纪初就开始,但是大多进行了结构设计,针对低压舱的数学模型,以及在建立的数学模型上的现代控制方式的研究比较缺乏,多数依靠以往经验,控制精度不够。通过数学推导和实验拟合研究了低压低氧舱各个环节数学模型,得到系统整个系统的数学模型,在模型基础上采用串级PID 的控制方式,组成双闭环PID 控制过程,通过matlab 仿真控制过程,显示控制过程有很好的响应性和精度。最后通过实验验证了模型和控制方式的可行性。
2 系统概述
低压低氧实验舱组成,如图1 所示。
图1 实验舱结构图Fig.1 Structure of the Test Cabin
进气口与大气接通,电磁阀和电动调节阀控制进气的接通和进气量。水环式真空泵用于抽出舱内气体。通过控制抽气、进气量的差值,使舱内航空高度以特定速度上升和下降,同时,抽气和进气系统运行保持舱内空气流通,副舱和主舱用舱门隔开,舱外人员可以通过副舱进行高度调节进入实验主舱。系统上升、下降速度和舱内模拟高度以及进气流量是系统控制主要参数,上升和下降速度过快会对舱内人员造成耳膜损坏、毛细血管破裂等严重后果。同时在进行医学实验和人员训练时会消耗舱内氧气,控制舱内空气流通量,保持舱内氧分压,通过舱内循环空调,近似模拟不同高度实际环境。
3 系统模型建立
3.1 真空泵模型
真空泵采用水环式真空泵,设舱内压力为P0,真空泵入口压力为P1,由可压缩气体等熵流动理论可知,气体在管道内流动流量特性和真空泵入口压力和舱内压力比值ε 成正比,当ε 达到临达到临界速度为当地音速[3],其中K 为可压缩流体绝热系数,当流体为空气时,K=1.4,得到此时 ε*=0.528[4.5]。通过相关理论可得出,在高低压端压力比值趋于1 时,可压缩流动理论可以近似为不可压缩流体流动,其流动方程可以近似为伯努利方程。故在此假定真空泵流量为高低压端压力差三次方函数。另一方面,真空泵流量受到泵体腔室的影响以及管道、消音器、缓冲罐的沿程阻力影响[6]。通过实验数据拟合,可以得到真空泵流量为:

真空泵压力和电机转速成线性比例,电机转速和电源的频率有关,通过变频器控制真空泵转速从而控制泵入口压力。
3.2 电动调节阀模型
电动调节阀调节大气进入舱内气体流量,通过调节阀门的开度可以得到设定流量值。文章中采用的调节阀公称直径为50mm,调节阀行程为32mm,模拟量(4~20)mA 输入。通过阀门流量计算方法[7]和实验拟合可以得到阀门全开时流量为:


3.3 舱内气体模型
设舱内压强为P,空气气体常数为R,舱内绝对温度为T,舱内气体质量为m,通过理想气体状态方程PV=mRT。得到增量方程:

式中:Δm—进出舱内气体质量流量差,各参数为国际制单位。
舱内气体密度:

舱内气体压强与模拟高度的对应关系为:

通过计算舱内空气质量流量变化量可以得到压力变化速率,计算一次采样时间相邻高度差可以得到舱内模拟高度升降速度。氧气体积浓度为n,舱内氧分压为:

4 系统控制方式及其仿真
低压低氧实验舱需要控制的是舱内高度升降速度和保持设定实验高度以及舱内空气流入流量保证舱内氧分压值等于舱内高度值对应的自然值。舱内空气流入质量控制方式为比例控制,采集舱内压力,采样时间设定为1s,由前文中电动调节阀模型,控制方式为比例控制,输入量为舱内压力,计算得到阀全开时的流量。主控制器输出(4~20)mA 模拟量控制调节阀行程从而控制阀的开度φ,调节舱内进气流量。
升降速度环节采用的控制方式为串级PID,PID 是工程中使用广泛的控制方式,具有简便、易于实现的特点,文章系统为时变非线性系统,单闭环PID 控制出现较大波动,控制过程精度不高。串级PID 相对于单闭环PID 控制方式具有更快速度,稳定性、控制质量更好的特点[8-10]。具体控制方式为升降速度—舱内压差闭环作为主环,主环的输出量为一个采样周期舱内压差变化,将压差变化量作为压差变化—真空泵压力闭环的输入量,得到水环式真空泵压力的输出量,对应换算到真空泵电机转速,作为执行器变频器的输入量,控制实验舱抽气质量流量,在控制真空泵压力时将舱内压力作为参考压力参与PID 调节过程,这样保证了时变系统中控制环节的稳定性和跟随性。得到泵的控制量为绝对压力100Pa—p0,p0为舱内绝对压力。
高度保持环节用PID 控制方式为保证进气流同时,控制抽气的质量流量与进气质量流量相等。仿真的控制过程为,速度闭环调节舱内上升速度,当舱内高度达到与设定值相差15m 时,启动高度调节PID,并使速度不大于设定的升降速度绝对值。根据第二节中得到的各个环节的数学模型,在simulink 中搭建仿真模型,仿真起始高度为2270m,设定高度为8000m,上升速度设定值为2m/s,高度下降速度为-2m/s,下降高度终止值为2270m。进气流量设定值为40m3/h,主舱体积12m3。串级PIDsimulink 控制仿真图,如图2 所示。采样时间为1s。模型仿真得到PID 参数整定,如表1 所示。
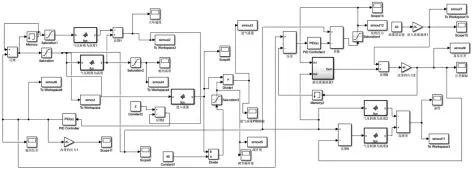
图2 升降速率控制串级PIDSimulink 仿真过程Fig.2 Simulation Process of Control the Change Speed Use Cascade PID Modeling by Simulink
速度闭环串级PID 主环为PID 控制,副环和高度保持闭环采用PI 控制。
表1 各控制闭环PID 参数Tab.1 The PID Parameters of the Closed Control Process
海拔上升过程速度调节环节阀的开度和真空泵压力,如表2所示。压差—速度环压差输出量和串级PID 双闭环输出的实际压差变化图和舱内速度变化图,如图3 所示。仿真结果显示控制系统对理想压差跟踪效果较好,响应速度快,没有出现超调,控制过程稳定,控制质量较好。高度下降环节,高度从8000m 开始下降,到2900s 时,达到设定初始海拔高度。平均速度(-1.97)m/s,没有出现速度超调,过程稳定,满足设计要求。下降过程参数,如表3 所示。
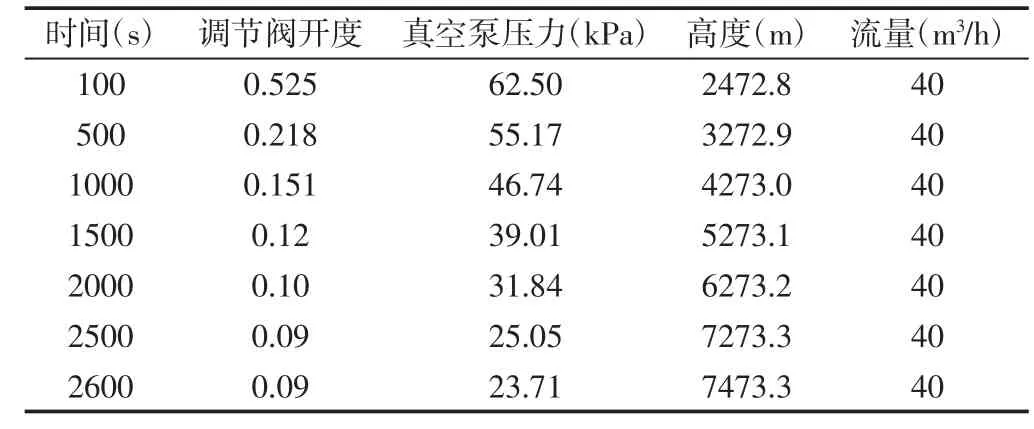
表2 高度上升阶段阀门开度和真空泵压力与高度变化Tab.2 The Change of the Opening of Valve and the Pressure of Vacuum Pump and the Attitude in Cabin of High Ascent Phase
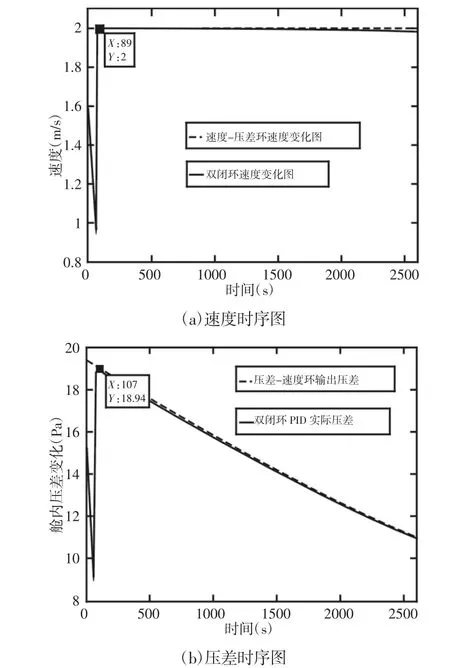
图3 串级PID 控制过程Fig.3 The Cascade PID Control Process
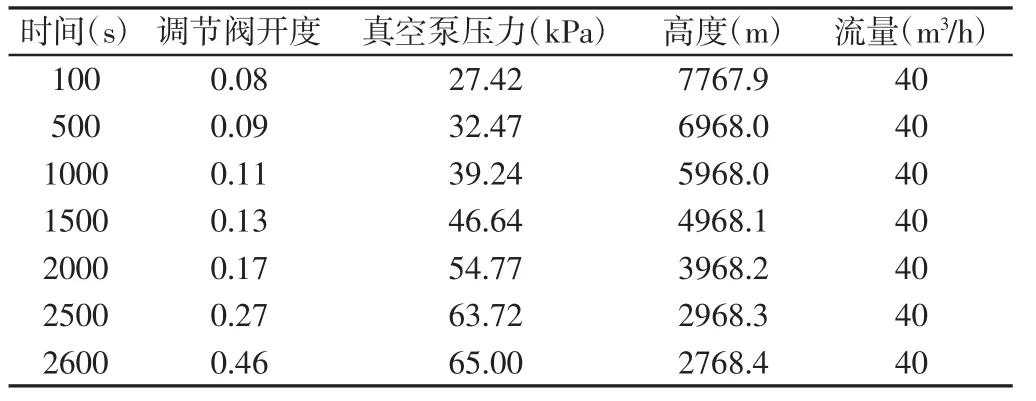
表3 高度下降阶段阀门开度和真空泵压力与高度变化Tab.3 The Change of the Opening of Valve and the Pressure of Vacuum Pump and the Attitude in Cabin of High Descent Phase
高度上升环节,进行第2855s 时,系统达到高度7985m,启动高度调节过程。高度保持过程和保持过程的速度变化的仿真结果,如图4 所示。高度调节最大超调量为38m,结果显示高度保持过程快速、稳定稳态误差小。速度变化在可接受的安全范围内,未出现速度超调,满足控制要求。

图4 舱内高度调节Fig.4 The Attitude Adjustment in the Cabin
5 实验及分析
低压低氧实验舱实验在青海大学医学院进行,实验舱体,如图5 所示。

图5 低压低氧实验舱Fig.5 Hypobaric Hypoxia Test Cabin
主控制器选用西门子S7-300 型PLC,舱内通过氧气、二氧化碳传感器监测生理环境状态,孔板流量计配套压力传感器监测主、副舱进气流量,各传感器模拟量采样间隔时间为1s。舱内放入实验白鼠十只,兔子一只,用于检测耗氧实验中舱内氧分压保持状态。舱内温度19℃,室外温度为13℃。在高度保持环节,为了避免在长时间的实验中由于传感器测量和控制器计算误差导致的阀门和泵频繁改变开度和转速,设置控制死区为舱内海拔高度和设定值差值绝对值5m。另一方面,为防止出现机械故障导致真空泵停机或者进气调节阀无法打开造成舱内高度瞬时快速升降,设置了速度安全检测程序,当升降速度绝对值大于15m/s 时,关闭自动控制系统,报警提醒,转为手动控制,由于调节阀关闭时的时滞性,采用安全电磁阀控制进气开关。
进行了三次时长12h 实验,设定高度分别为5000m 和8000m,当地高度为2143m。结果显示在主舱设定高度升高速度为2m/s 时,在120s 后,速度稳定,实际最大速度为2.4m/s,设定高度升降速度为1m/s 时,最大超调量为0.5m/s。最大速度远低于安全升降速度上限。实验上升速度,如图6(a)所示。舱内高度从3756m 上升到3875m,用时60s,平均速度为1.98m/s。进气量设定值两次实验分别为40m3/h、30m3/h,误差在±3m3/h 内变化。舱内高度分别在1020s、2750s 时达到设定高度5000m 和8000m。稳态时,高度在设定高度±10m 误差内。8000m 高度模拟实验,如图6(b)所示。根据wincc 历史数据记录得到三次实验数据,如表4、表5 所示。实验过程数据实验速度设定值越小,速度超调越大,这是由于当速度设定值小时,要求舱内进出气压差变化速度小,真空泵转速较低,实验误差较大。
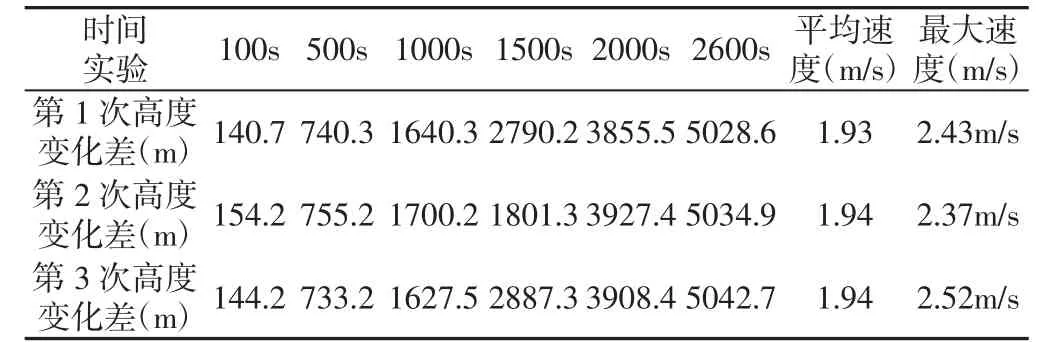
表4 三次实验高度变化趋势Tab.4 Attitude Variation Tendency of Three Experiment
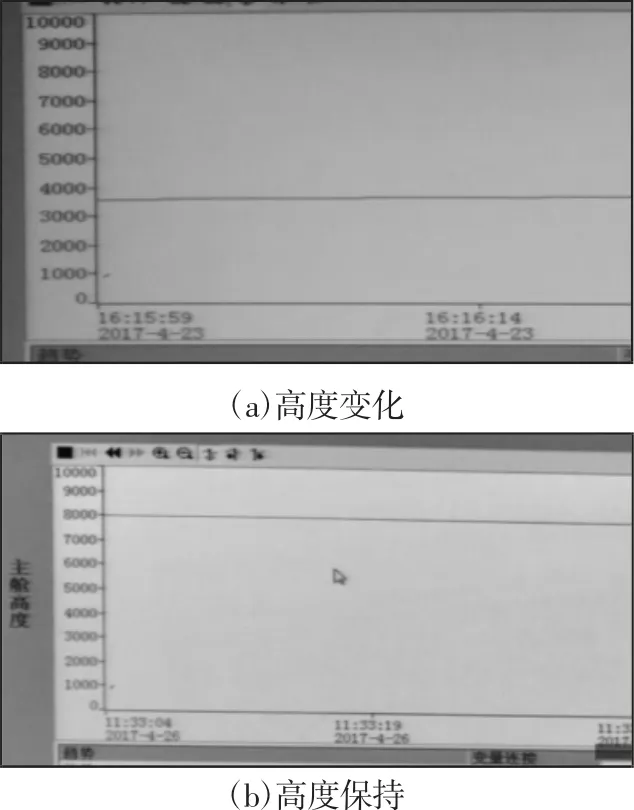
图6 实验过程参数Fig.6 The Parameter of the Process Control
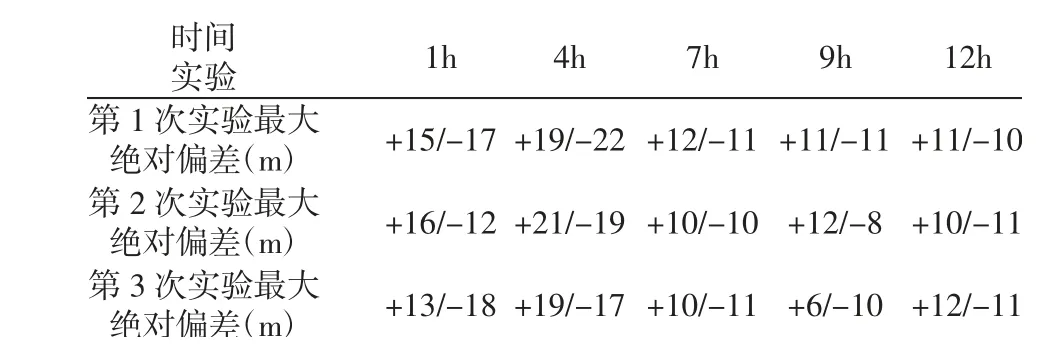
表5 三次实验高度保持环节偏差Tab.5 The Deviation in High Keep Link of Three Experiment
高海拔动物耗氧实验结果显示,氧气、二氧化碳浓度显示正常,未出现由于生理活动二氧化碳浓度过高的状况,8000m 高度氧分压保持为7.2kPa 左右,能够有效模拟高海拔时的低压低氧的自然状态。
6 结论
(1)通过流体理论、数学推导和实验拟合的各个环节组成的系统模型通过最终实验对比证明能够较为真实反应低压低氧实验舱的工作过程。(2)在控制升降速度过程中的串级PID 能够有效控制得到设定值,相对于单闭环PID,调节更加快速,控制质量更高,并且易于工程实现,不需要主控制器作过多数学计算。(3)高度保持PID 调节过程调整时间较短,误差小,能够保证舱内高度满足设定需要,另一方面,进气量能够保证舱内有氧气消耗时及时补充新鲜空气保证氧分压恒定,能够长时间模拟高海拔低氧环境。