TM30 测量机器人在某水库地质灾害防治中的应用
2020-10-21吴国宏李国权
吴国宏,杨 伟,李国权,刘 贺
(黄河勘测规划设计研究院有限公司,郑州450003)
某水库居民点库岸地质灾害防治工程监测项目设计方案中,地表监测设计有水平位移、垂直位移监测和相对位移监测,地下设计有深部位移监测、地下水监测等。 地表水平位移监测可采用交会法、边角网法、极坐标差分法、GNSS测量、激光扫描测量等。 由于地质灾害监测点多、战线长、分布零散、监测受时间、地形条件的限制,使用常规测量仪器和方法进行观测困难较大。为了克服这些缺点,探求使用TM30测量机器人按极坐标法进行自动化观测的新方法具有重要意义。 本文研究了利用TM30测量机器人全站仪进行自动化监测的技术,采用极坐标法监测的可行性及精度分析。
1 TM30功能及作业方法
1.1 TM30功能
TM30测量机器人是由徕卡公司研发生产的全站仪,它是一个自动搜索、跟踪、辨识和精准瞄准目标,进行测量角度、距离、三维坐标并且自带自动化系统及应用软件[4]。 TM30测量机器人实现目标自动精准照准、小视场、数字影响自动采集等先进技术,使测量机器人的适用范围进一步扩大, 满足库岸地质灾害监测需求。
1.2 作业方法
借助于TM30测量机器人全站仪,最方便的测量坐标方法是极坐标法。 测量机器人的优势在于能够代替人工自动地完成监测、记录、储存等任务。 由于该仪器测角精度为±0.5″, 且与之匹配的测距精度达到±(1mm+1ppm),能够满足多种安全监测的要求。
如图1,O点和A点为已知点,P点为待定点,预测P点的坐标,可在O点设置仪器,以正、倒镜镜测角β,测出O点到P的平距D,则P点坐标可用式(1)计算[6]:


图1 测量机器人极坐标测量
若不考虑已知点误差,微分式(1)转换成为中误差形式[6],得
可见,待定点P的点位中误差,与测角和测距的精度,以及P点距离O点的平距有关。
1.3 监测点距离设置及精度分析
使用TM30测量机器人全站仪,极坐标法测站点和后视点选择在靠近边坡或滑坡体范围以外的稳定地方,测站点和监测点高差不宜超过100m,边长不宜超过1000m[6]。 因此,测站点和监测点之间边长选择是影响测量精度的重要因素。

在某水库地质灾害防治工程监测项目中,以TM30测量机器人采用极坐标法监测,若最远点的距离D=800m,一测回Mβ=±1.0″,则由式(3)可估算出Mp=±4.3mm, 能够满足边坡与库岸不稳定区变形监测精度要求。
2 TM30测量机器人在某水库地质灾害防治工程监测中的应用
某水利枢纽位于湖北省境内、 汉江与丹江汇口以下800m处, 是开发汉江的第一个控制性大型骨干工程,具有防洪、发电、引水、灌溉、航运、养殖等综合效益。 枢纽分两期开发,第一期工程坝顶高162m,正常蓄水位157.0m,相应总库容174.5亿m3,装机容量90万kW,年平均发电量38.3亿kW·h。大坝加高后,设计正常蓄水位升高13m,水库段回水至河南省淅川县境内,回水长度92.68km。 库岸线总长度为4610.6km[5]。
目前,大坝加高工程已基本进入正常蓄水,水库蓄水位抬高后, 库岸再造将直接影响沿岸居民点及重要基础设施的安全。因此,库区地质灾害监测预警工作具有十分重要的地位和作用[5]。
2.1 监测方法
本项目选择使用TM30测量机器人,按极坐标法直接测定变形点的三维坐标。
2.2 监测方案布设
监测区域为两面临水岸坡,左边为临水缓坡、右边为临水陡岸,居民点在岸坡上。监测方案布设主要针对库岸表层变形、不均匀沉降等因素进行监测,根据监测范围内的地形、地质条件等因素在稳定区域布设了5个C级GPS观测墩(TN01,TN02,TN03,TN04,TN05),作为水平位移监测网的基准点[5],并选择通视条件好、施测距离适当的基准点(TN01和TN03)作为测量机器人的测站点和后视点,在库岸边坡上埋设了6个有强制对中盘的观测墩,作为地表变形观测点(TP01,TP02,TP03,TP04,TP05,TP06),使用TM30测量机器人,按极坐标法直接测定变形点的三维坐标,最小监测距离300m,最大监测距离不超800m,布设方案如图2。

图2 监测点方案布设
2.3 监测资料分析
该项目从2014年初开始进行实地查勘、 监测网的设计、观测墩的埋设等准备工作,从5月份开始观测,监测周期按照《监测设计方案》确定为:一般情况每月观测1次,汛期每月观测2次,雨雪天相应的增加观测次数,本文主要对2014年5月~2017年1月之间的42次观测资料进行分析[5]。
2.3.1 累计监测资料统计该监测区内6个变形点累计位移量统计如表1。
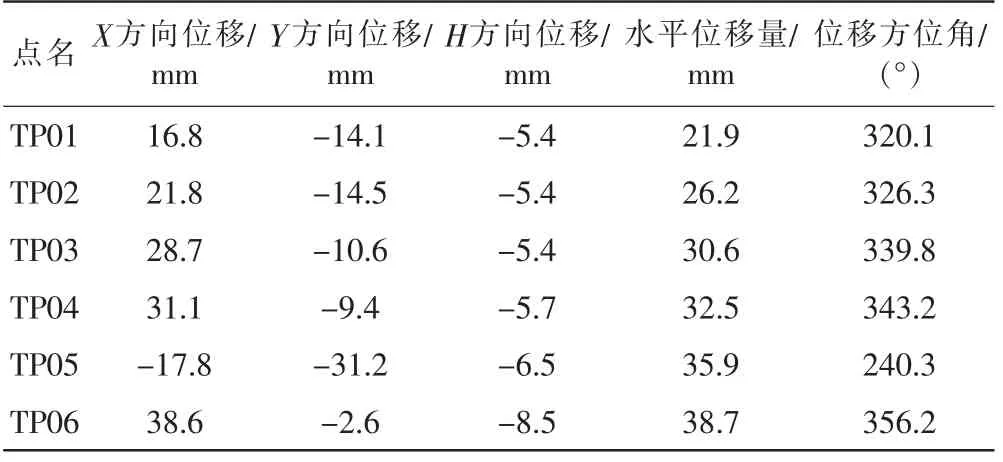
表1 监测点位移量变化统计
由表1可知, 监测点位移量中,TP06点水平位移量最大, 达38.7mm,TP01 位移量相对较最小,达21.6mm,整个库岸边坡在缓慢的移动中,从相邻观测周期的监测情况来看,变异量较小,达不到预警条件。
2.3.2 典型监测点资料统计
以TP06监测点作为典型监测点, 统计和分析被监测体变化情况, 由表2中TP06监测点42次监测位移量变化可知,监测数据变化有正值和负值,这是由于库水位变化、 膨胀土随着雨季和旱季季节变化而引起的,总体趋势正在缓慢移动。
3 TM30测量机器人在应用中提高精度的措施
以TM30测量机器人全站仪测角精度而言,仪器测角标称精度为±0.5″。这种精度是仪器内部精度,是在室内理想条件下获得的数值, 不能代表在外业中的精度。 据对TM30及其同类仪器长期使用的情况统计,边长在1km左右,采用强制对中,观测条件良好的情况下,一个测回的测角中误差大约为±1.5″。 TM30测量机器人采用自动显示技术,相比于光学经纬仪,仪器本身精度得到很大提高。

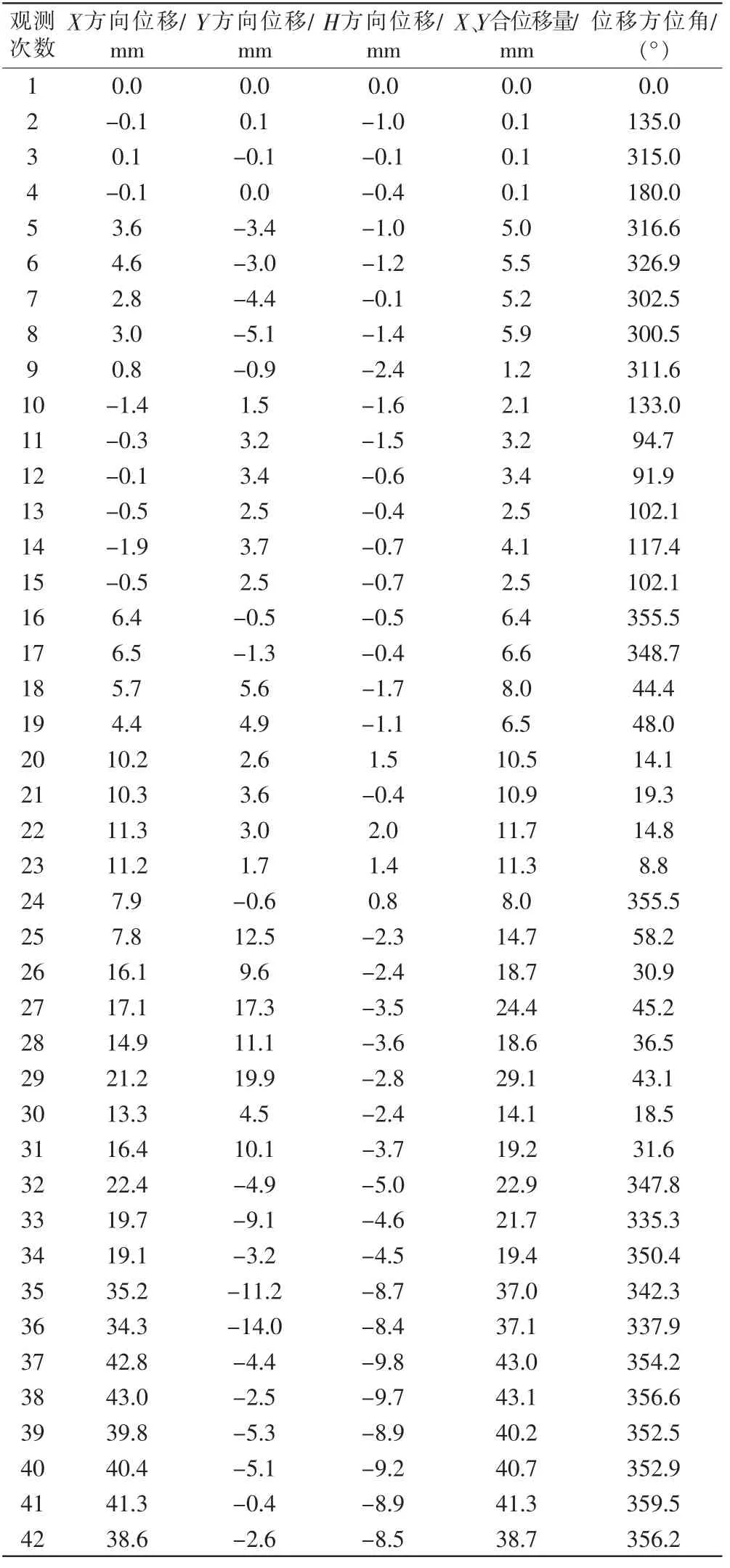
表2 TP06监测点累计位移量一览表

同样,若SA=SP=800m,meT=±2.0mm,则mβ=±0.6″。因此,在使用测量机器人按极坐标测量中,减弱目标偏心的误差也应该引起重视。
就目前TM30测量机器人而言, 测角精度主要取决于大气折光差的影响。使用测量机器人按极坐标测量时,要尽量选择良好的观测时段和气象条件。 若控制点较多时,应优先选择高差适中、通视条件好的测站点和后视方向,使视线避开折光、旁光差的影响[1]。
4 结语
(1)结合水库库岸地表变形监测的具体条件,使用TM30测量机器人全站仪的监测精度可满足水库地质灾害防治工程变形监测要求。
(2)选择合适的监测距离,可提高TM30测量机器人全站仪的监测精度, 库岸监测的最大监测距离不宜超过800m。
(3)使用测量机器人按极坐标测量时,应优先选择高差适中、通视条件好的测站点和后视方向,要尽量选择良好的观测时段和气象条件。
