自动化立体库激光测量系统选型及调试
2020-10-20张骞
张骞

摘 要 自动化立体库越来越多地应用于物流、仓库等行业,立体库主要由仓储管理系统、系统监控软件、堆垛机系统、输送线及仓储区组成。堆垛机系统是立体库的关键设备,通过测量系統和定位控制系统,堆垛机能够在仓储区进行升降、前后、货叉左右运动并精确取放货架货物,以保证立体库的高效、准确的出入库控制。
关键词 立体库;堆垛机;槽型光电开关;激光定位系统
概述
早期立体库纵向定位系统大多采用认址片和编码器方式,槽型开关通过感应认址片进行加减运算,无法显示堆垛机纵向实际高度,在有强电干扰及断电重启的情况下会频繁出现纵向计数错误报警,只能在出现报警时对纵计数器进行回原点操作,为了减少故障率,对立体库的纵向定位系统进行改造,提高立体库的运行稳定性及控制精度。
1现有立体库定位系统介绍
(1)认址片和编码器。在堆垛机运行方向相应位置上安装认址片,槽型开关跟随堆垛机上下、前后运行来检测认址片,每经过一个认址片,认址系统累加(累减)计数,并将计数值与要求达到的目的地址相比较,以实现准确认址。
(2)激光测距仪定位系统。激光测距仪定位系统是利用对目标的距离进行准确测定的仪器。工作时由光电元件接收目标反射的激光束,通过计时器测定的时间计算出激光测距仪至目标的距离。通常是在堆垛机的下横梁或者立柱上固定激光测距仪,并在相应的高度固定激光反射板配合使用。通过激光测距仪实时监测出的距离可以实现堆垛机的水平和纵向的定位控制。
(3)激光条形码定位系统。激光条码定位系统是通过对条形码的阅读来进行准确定位的仪器。激光条形码水平认址需要在货架或者地面支架上放置沿巷道方向的条码带,在堆垛机上安装条码阅读器;激光条形码纵向认址需要在立柱上放置沿载货台纵向运动的条码带,在载货台上安装固定条码阅读器,条码和扫描仪之间距离80~120mm。条形码阅读器读取头沿着条码带移动,它以毫米级的精度计算行进方向上的绝对位置数据[1]。
2纵向激光系统调试
(1)激光测距仪安装。首先将激光发射器安装于堆垛机底部钢梁上,在安装时注意激光发射仪不能高于载货台纵向低位硬极限限位,否则在载货台墩底时损坏激光发射仪,激光反射板安装于载货台底部,其反射板中心位置应垂直于激光发射器,立体库所选激光定位器型号为德国劳易测AMS304i40,其通讯方式为DP总线方式,激光定位器在堆垛机通信网络中为末端位置,故需在激光定位器上安装终端电阻,通电后通过调整激光发射器上调整螺栓,使激光束在反射板中心位置附近,确保激光束能够稳定可靠反射至激光发射器接收端。
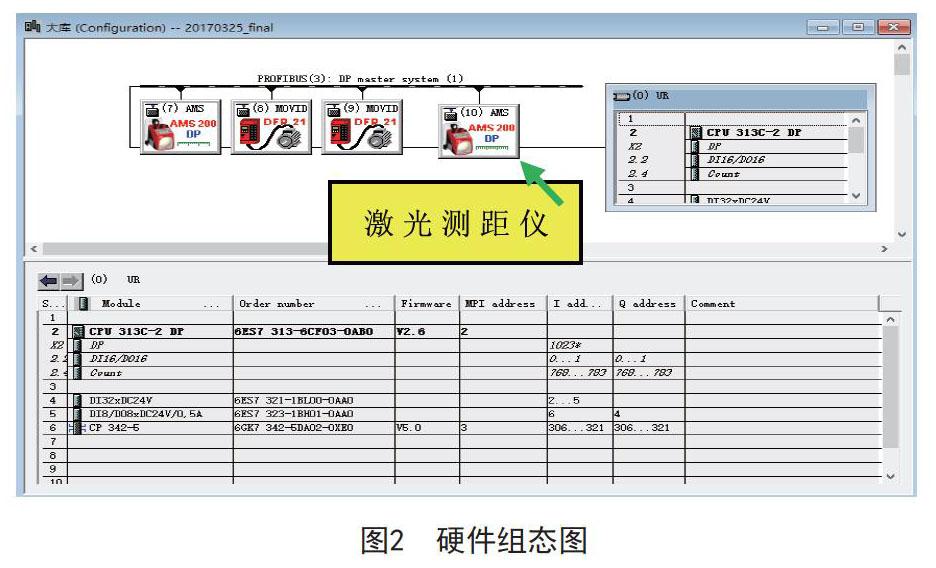
(2)网络及硬件组态。在进行组态时,打开硬件组态,在硬件组态中添加AMS304i40激光测距仪,并为激光测距仪分配地址。
通过图1可以看出,新装纵向激光定位器为网络末端,为其分配ID为10,通过DP总线依次连接,DP总线插头开关在网络首端和末端应打至ON上,中间为OFF,确保整条网络通信畅通,在硬件组态设置完成后,对激光定位器进行地址设定,通过激光测距仪面板将激光测距仪地址设置为10,确保在整条网络上地址唯一。堆垛机PLC通过CP342-5通讯模块与红外通信连接,并通过红外通讯与地面主站PLC进行数据交换,堆垛机控制系统在主站通信网络中地址为13,其地址与堆垛机内部通信网络地址相互独立。
(3)软件调试。立体库层数为5层,首先取垂直一列货位逐层行走,收集每一个货位的定位参数,需进行多次行走定位,并取平均值,保证每层高度准确,并将高度值输入系统内部。每层的高度值包含低位和高位,取货过程为堆垛机纵向由低位至高位,将货叉从托盘底部插入并升至高位挑起,放货过程为堆垛机纵向由高位至低位,货叉高位将托盘放至小车或货架并运行至低位将货叉抽出,所以要对每层高位和低位数值多次定位,并取平均值作为每层最优高度值[2]。
3结束语
通过对堆垛机纵向定位系统优化,将认址片和编码器定位方式变为量化控制,堆垛机能够实时显示当前高度值,在断电后无须进行回零点操作,提高了运行效率,在电磁干扰的情况下不容易丢失数据,提高了系统的抗干扰能力。
为了保证各定位系统能够发挥最大功能,可根据堆垛机机械结构和使用场合合理的使用不同的定位系统,保证了堆垛机高效、稳定运行。
参考文献
[1]漆汉宏.PLC电气控制技术[M].北京:机械工业出版社,2012:59.
[2]范方灵,于娟.西门子S7-300在自动立体仓库中的应用[J].科技信息,2010(1):826-827.
