超声波防撞测速及避障仪设计及实现
2020-10-20苏秋美刘亚荣
苏秋美 刘亚荣
摘 要:目前,我国自动化技术正处于不断创新与发展阶段,超声波技术随之被广泛应用于各个领域,解决了很多技术难题,同时将各行业推向智能化发展,为社会经济发展做出了重大贡献。文章利用超声波技术,实现小车的智能测距、测速及避障,并通过红外寻迹模块完成小车的自主寻迹。与传统智能避障系统相比,仅单独使用超声波模块就能够同时实现测速和避障功能,避免了器件浪费,具有经济实用等优点。
关键词:超声波;智能避障;自主寻迹
中图分类号:TP368.1 文献标志码:A 文章编号:2095-2945(2020)29-0083-03
Abstract: At present, China's automation technology is in the stage of continuous innovation and development, and ultrasonic technology has been widely used in various fields, solved many technical problems, and promoted the intelligent development of various industries at the same time. It has made a great contribution to the social and economic development. In this paper, the ultrasonic technology is used to realize the intelligent ranging, speed measurement and obstacle avoidance of the car, and the autonomous tracking of the car is completed through the infrared tracking module. Compared with the traditional intelligent obstacle avoidance system, the use of ultrasonic module can realize the function of speed measurement and obstacle avoidance and avoid the waste of devices, so it has the advantages in economy and practicality.
Keywords: ultrasonic; intelligent obstacle avoidance; autonomous tracking
在社会发展进程中,制造技术的迅速发展,给人们的生活带来了极大的便利[1],实现全面智能化,是人们的梦想,也是今后的发展方向。智能小车作为智能化发展的一个方向,在多个领域得到应用,如:科技研究勘测、交通安全避障、物流分配传输及无人宣传工具等[2-3]。
本文以51单片机作为控制系统,通过超声波模块发射和接收超声波信号,实现小车和障碍物之间的实时测距及避障功能;同时,采用红外寻迹模块实现小车的自主寻迹功能[4],满足一定领域的需求。
1 超声波防撞测速及避障仪设计
本文所设计的超声波防撞测速及避障仪主要由超声波模块、红外寻迹模块、LCD显示、51单片机、报警模块、按键控制、电机驱动、直流电机和电源模块组成。
其工作原理为:51单片机给超声波模块的发射端一个持续10us的高电平,超声波模块开始发射超声波,同时51单片机计时器开始计时;当发射出去的超声波遇到障碍物时,就会被反射回来,超声波模块接收端接收反射信号,并将信号发送给单片机,单片机检测到超声波模块接收端的反馈信号时,就停止计时。根据声速,便可以计算出小车与障碍物之间的距离。通过不同时刻小车与障礙物之间的距离差和测距所用的时间差,就可以计算出小车对障碍物的相对速度[5],并将所测得的距离和相对速度通过LCD实时显示。
按键控制模块可以设置障碍物与小车之间的最小安全距离值。当单片机检测到小车与障碍物之间的距离等于或小于所设置的最小安全距离值时,报警模块发出蜂鸣报警;通过单片机改变电机驱动的输入信号来控制直流电机,实现小车后退、转弯,从而使小车避开障碍物。
此外,当红外寻迹模块检测到黑线时,也可以通过单片机改变电机驱动的输入信号来控制直流电机,对小车的运动方向进行一定角度的调整,从而实现小车的自主寻迹功能。
2 硬件电路设计
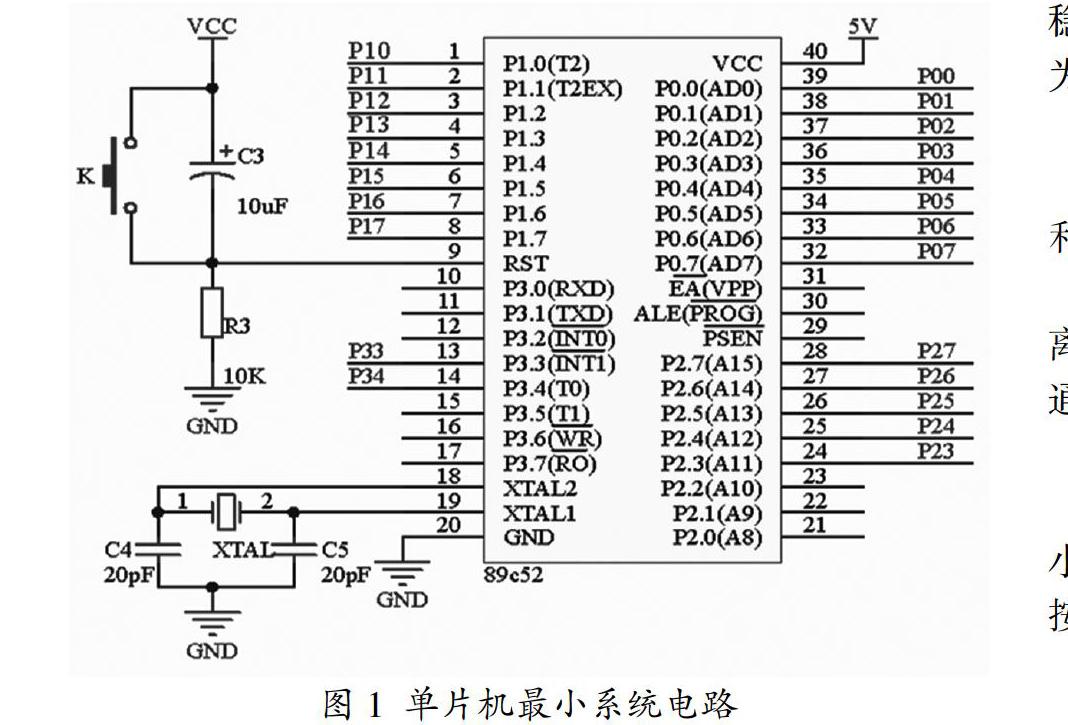
2.1 单片机最小系统电路设计
单片机最小系统是整个系统的控制中心,主要由时钟电路和复位电路组成[6]。(如图1)
时钟电路主要由2MHz的石英晶振和两个20pF的瓷片电容组成,为单片机内部电路提供所需要的时钟信号。
复位电路的主要功能是对整个系统进行复位,使单片机重新开始工作。主要由极性电容、按键和电阻组成。
2.2 LCD显示电路设计
LCD显示主要实现实时显示小车与障碍物之间的距离和小车对障碍物的相对速度,主要由LCD1602构成。
LCD1602是应用广泛的字符型液晶显示模块。其中,DB0-DB7是8位双向数据传输引脚,可用来进行数据传输。VO是显示对比调整端,可通过改变与其连接的电阻R2的阻值调整显示屏显示对比度。RS是寄存器选择端,当单片机给其一个高电平时,选择数据寄存器;当单片机给其一个低电平时,选择指令寄存器。RW是读写信号端,当单片机给其一个高电平时,执行读操作;当单片机给其一个低电平时,执行写操作。E是使能端,当其由高电平变为低电平时,LCD1602就开始执行命令。
2.3 电机驱动电路设计
电机驱动的主要功能是结合单片机对直流电机进行控制,从而改变小车的运动状态,主要由L298N驱动芯片和二极管组成。
当单片机给L298N驱动芯片的使能端INA和INB一个高电平后,就能够通过改变IN1-IN4的输入信号来控制直流电机的转向,从而控制小车前进、后退、左转和右转[7]。
2.4 超声波模块电路设计
超声波模块的主要功能是发射和接收超声波信号,采用HC-SR04超声波测距模块实现。当单片机给超声波模块的发射端TRIG端一个持续10us的高电平,超声波模块就发射超声波,发射出去的超声波遇到障碍物后会被反射回来,超声波模块ECHO端接收反射回来的超声波信号,并做出响应,将接收到的超声波信号进行放大,然后发送给单片机,让单片机做出处理[8]。
2.5 红外寻迹模块电路设计
红外寻迹模块的主要功能是对地面的黑线进行检测,采用TCRT5000红外反射传感器。
当红外寻迹模块的左端探测器检测到黑色轨迹时,其发射出的红外光被黑色轨迹吸收,此时LO端则输出高电平;若检测到的是白色地面,则其发射出的红外光被反射,LO端输出低电平。RO端输出信号同理。单片机根据红外寻迹模块LO和RO端的输出信号,就可以判断出小车的运动轨迹[9]。
2.6 电源模块电路设计
电源模块的主要功能是为整个系统提供稳定的工作电压。其具体电路主要由六节干电池、7805稳压管、电容、发光二极管和电阻组成。
六节干电池提供9V电源电压,给电机驱动模块供电;经过7805稳压管稳压后得到5V电压,给系统中其他模块的电路供电。电容起到滤波的作用,使稳压后的电压能够稳定输出。电阻起到限流保护电路的作用。发光二极管作为电源指示灯。
2.7 报警电路设计
报警电路的主要作用是实现报警功能,主要由三极管和蜂鸣器组成。
当小车与障碍物之间的距离等于或小于最小安全距離值时,单片机给三极管的基极一个低电平,使三级管导通,蜂鸣器发出声音报警。
2.8 按键控制电路设计
按键控制电路主要用来设置小车与障碍物之间的最小安全距离值。当按下K1时,屏幕跳转到设置界面;然后按下K2,对设定值进行增加;按下K3,对设定值进行减少。
3 软件设计
采用Keil仿真软件进行编程对控制中心进行控制,实现测速及避障功能。
3.1 LCD显示流程设计
首先要完成LCD的初始化,然后LCD显示小车与障碍物之间的距离和小车对障碍物的相对速度,同时检测按键K1是否按下,如果K1按下,则显示屏跳转到最小安全距离值设置界面,如果K1没有按下,则继续执行程序。
3.2 按键控制流程设计
按键控制程序流程设计为:首先进行系统初始化,定义静止为小车的初始状态。当程序执行红外寻迹程序后,检测按键K1是否按下,如果K1按下,则显示屏跳转到最小安全距离值设置界面,接着,若按下K2则对设定值进行增加;按下K3则对设定值进行减少。如果K1没有按下,则程序返回执行红外寻迹程序。
3.3 红外寻迹流程设计
红外寻迹流程设计为:首先进行系统初始化,定义静止为小车的初始状态。然后单片机根据与其连接的红外寻迹模块的输出端口的输出信号,判断红外寻迹模块的探测器是否检测到黑线;再通过判断处理程序对小车的运动状态进行调整,如果红外寻迹模块左端探测器没有检测到黑线,则通过单片机控制小车向右转一定角度,如果右端的探测器没有检测到黑线,则控制小车向左转一定角度,若左右两端的探测器都检测到黑线,则控制小车根据黑线的轨迹运行。若红外寻迹模块没有检测到黑线,则小车继续前进。
3.4 系统主程序流程设计
主程序流程设计为:首先对系统进行初始化,定义静止小车的初始状态为静止状态。当执行红外寻迹程序后,超声波模块开始发射和接收超声波信号,同时单片机获取超声波模块发射超声波到接收反射信号所用的时间,利用时间、距离和速度之间的关系计算出小车对障碍物的相对速度V及小车与障碍物之间的距离D,并将数据显示到LCD显示屏上。然后检测在此过程中按键K1是否按下,如检测到K1按下,则LCD显示屏跳转到最小安全距离值设置界面,可对最小安全距离值S进行设置,设置完最小安全距离值S后,程序继续执行红外寻迹程序,在小车进行红外寻迹的过程中,持续比较小车与障碍物之间的实际距离D与最小安全距离值S的大小,若小车与障碍物之间的距离D等于或小于最小安全距离值S,则蜂鸣器报警,同时小车自主避开障碍物。
4 结束语
本文所设计测速避障系统以单片机为控制中心,采用超声波实现了避障和测速,同时完成了自主寻迹功能,具有简单、经济实用等优点。实物如图2所示。
参考文献:
[1]李楠,邓媞,陈晓玲.工业机器人技术在自动化控制领域中的应用[J].中国新技术新产品,2019,9(15):5-6.
[2]李德毅,马楠.智能时代新工科-人工智能推动教育改革的实践[J].高等工程教育研究,2017,3(05):8-12.
[3]张崇峰,韩亮亮.面向载人月球探测任务的月面机器人系统初探[J].载人航天,2019,25(05):561-571.
[4]周玮,高琳琳,姚建红,等.基于单片机的智能小车防撞系统设计[J].常熟理工学院学报,2019,33(05):85-89.
[5]户晋文.基于视觉融合的车辆与行人目标检测及测距方法研究[D].华南理工大学,2018.
[6]顾志华,戈惠梅,徐晓慧,等.基于多传感器的智能小车避障系统设计[J].南京师范大学学报(工程技术版),2014,10(01):1-19.
[7]吕丹丹.适用于小型智能车的行驶路况评价及自主避障控制研究[D].北京交通大学,2016.
[8]顾明星,张皓,陈海洋,等.基于无线射频和超声波的室内定位装置[J].北京印刷学院学报,2019,27(10):113-117.
[9]王鑫,赵文鑫.人工智能技术在机械电子工程领域的应用[J].电子技术与软件工程,2019,5(06):15-23.
