空间自动着陆导航激光雷达关键技术研究
2020-10-20杨文兵陈文弟
杨文兵 陈文弟
摘 要:随着科技的快速发展,我国越来越重视空间自动导航着陆雷达技术的研究。为了进一步提升对于太空探测的研究深度,必须要研制新型的自动着陆导航传感系统,改进传统的研究方式,以激光雷达为切入点,实现高水平的技术创新。该文主要针对空间自动着陆导航激光雷达的关键技术进行简要分析,并提出合理化建议。
关键词:空间自动着陆导航;激光雷达;关键技术
中图分类号: TN958.98 文獻标志码:A
0 前言
随着信息技术的不断进步,人们对于太空探测的深度增加,新型的激光雷达核心技术也逐渐崭露头角,提高了对自由探测区域的选择度,实现复杂地区的自主探索,创新对应的多功能传感器,使着陆器可以准确进行导航和着陆,实现对障碍物的合理规避。
1 激光雷达技术内容
为了保证着陆器在着陆地能够自由穿梭,必须要研制多功能的传感器,提高传感器的检测能力,从而实现高精准的地形测绘以及导航规避。在测绘领域中,激光雷达技术得了行业内专家人士的认可 [1]。目前产生了车载、机载以及固定站点等多应用平台的激光雷达测绘产品,使传统设施设备的测绘能力能够在地形测绘、数字城市建设以及地形测量等多个领域得到合理应用,发挥激光雷达技术的独特优势。在导航规避中,激光雷达技术作为传感器领域的重要技术,其可以凭借机器设备的多样化功能,为无人驾驶车提供完美的路径规划以及障碍物规避信息,为后续的航空航天信息着陆导航奠定坚实的基础。
2 激光雷达技术应用分类
2.1 激光测绘雷达技术发展情况
在激光雷达技术的应用过程中,其延伸出来的图像测绘技术已经比原有的技术更加受到社会各界的广泛关注。测绘雷达技术在地形测量中可以获得高分辨率的三维图像数据,实现内部的激光测绘信息数据目标的细化,通过阵列探测找出隐藏目标,实现探测技术与地理信息系统数据的实时共享。车载激光测绘产品主要可以用于全视场扫描,发挥双激光雷达技术的作用,实现区域的三维信息采集。固定站点的激光雷达测绘产品则用于小型区域内的三维成像模型构造,实现现代化的行业信息采集的便捷化和便利化[2]。
2.2 激光自主导航雷达技术
激光自主导航雷达技术可以通过环境感知进行自主导航,应用于无人车驾驶、机器人定位导航、辅助定位导航等领域,激光雷达技术如同系统的“眼睛”。导航测绘系统通常采用激光雷达阵列成像的方式,通过扫描一段区域,建立高精度的数据地图来感知周围环境。在这项技术不断发展的过程中,还可以用其他的多功能的激光成像雷达技术,实现测高与测低信息之间的合理地形匹配、导航以及危险探测等功能。
2.3 激光三维成像
激光成像雷达的成像方式,主要分为单点扫描、多点扫描以及面阵成像。
单点扫描是利用单维的扫描机构和单元探测仪器,使数据采集在成像时就能够获取,同时将数据信息传输到对应的互联网系统中,实现图像的快速扫描和测绘,扫描机构根据不同场景的变化,及时采集数据信息并做好有针对性的传输工作。其特点是成像时间长、数据刷新效率低且图像处理技术十分困难,必须要有大型的扫描视场。
面阵成像方式的结构就比较简单,只需要利用模拟机构采集信息,不需要提高数据刷新效率就能实现体系化的光学口径以及验证,实现高灵敏度的激光图像绘制。
实验时雷达激光技术采用了阵列成像的方式,扫描角度为40°×360°,成像数率为10 Hz,作用距离为70 m,距离精度为2 cm,从而实现车载环境下的高精准三维环境感知,以及无人车在实验条件下的模拟导航行进。
3 自主着陆导航激光雷达技术基本内容
3.1 激光雷达技术原理
着陆导航激光雷达,必须要具备安全着陆、自主导航、风险规避等功能,具有高标准的成像速率和成像分辨率。激光雷达可以应用激光单点测距的方式实现有效扫描,使激光图像在测量过程中经过空间映射,实现高能量的脉冲激光处理。由于激光发射频率和扫描速率二者之间的不兼容性,一个指标的要求提升必定会导致另一个指标的下降,因此必须要较好地解决该项成像体制中指标的非兼顾性问题。
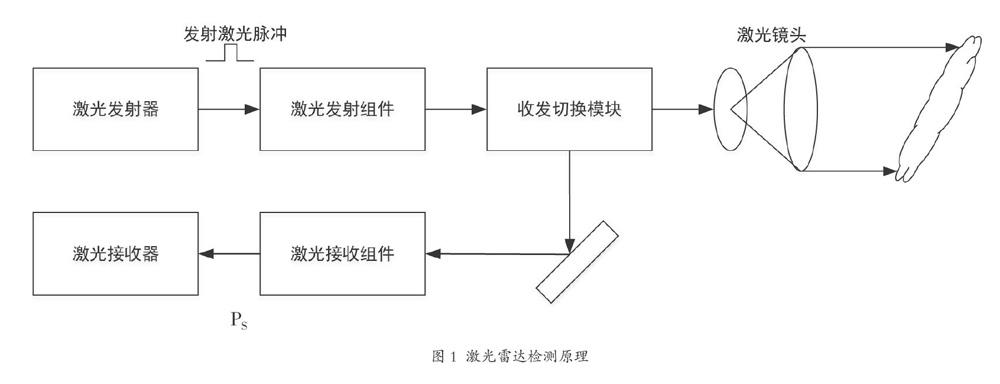
激光雷达包括发射机、光学系统、探测器信号处理以及数据无线处理等部分,发射机发射高能量的脉冲激光后,通过发射光学系统将其映照于探测区域,通过光接收组件进行收集,使探测器在高标准情况下,实现多通道的光电转化以及信号的完善,进一步实现距离测量标准的精确化。图像处理电路根据不同组件的信息反馈,完成目标距离的维度信息图像分析,并将其输出给着陆器控制系统,以该种信息作为导航处理的根本依据,确保测量信息以及存储信息的中间转换器角色的实时转换。激光雷达原理如图1所示。
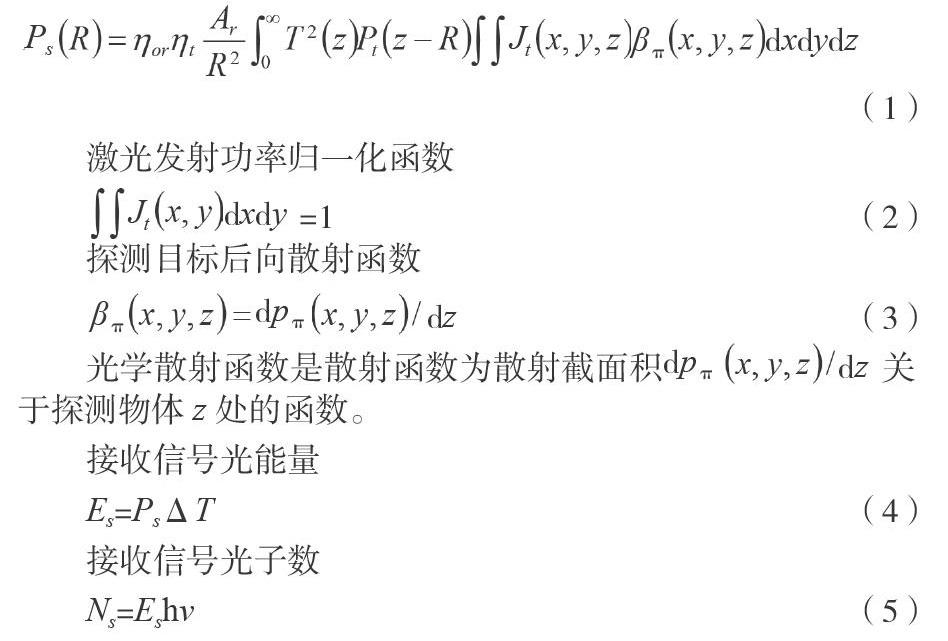
激光雷达接收的信号功率=发射激光功率分布与目标后向散射系数的卷积,再考虑光学天线、大气传输衰减等因素,障碍物z处后向散射信号的激光雷达方程的一般形式如公式(1)所示。
式中:Ar表示光学天线有效接收孔径;R表示激光雷达作用距离;ηor接收光学系统效率;ηt发射光学系统效率;T2双程大气透过率;x和y构成激光有效面积;Jt表示激光发射功率的归一化计算结果;βπ为激光束照射到目标后散射结果;Pt为激光发射功率;Ps表示接收激光的功率;ΔT表示发射和接收时间差; Es表示接收能量;h表示普朗克常量;v表示光子辐射频率; 积分函数符号;表示散射截面积关于探测目标距离的微分。dx,dy,dz分别表示关于x,y,z方向的微分函数。通过以上公式可以计算出反射激光能能量和接收到的光子数。
3.2 工作模式
激光雷达可工作在单点测量、小视场成像以及大视场成效等多种模式下。单点测量的模式会对发射天线的距离进行调整,并反复比对,以此来获取较小的激光脉冲效果,实现激光能量的具体化处理,提升激光雷达技术的应用效果。在中间段距离的设计中,激光雷达可以扩大激光的发射距离,将其转换成小视场阵列成像,形成精准化的数字高程图。通过相关的存储的地图匹配数据,进行定时导航的着陆点控制,在高标准下实现探测范围的扩大,完善相应的三维图像分辨率。
4 关键技术内容分析
4.1 高频率激光发射技术
在激光雷达技术中,光纤激光器输出窄、脉冲质量好且具有更小的体积和更低的能耗,能够很好的进行散热。但其受热效应的限制,必须要增强光纤激光器的脉冲数,提高功率,以此来降低离子绝对值的相应制约因素的影响。半导体泵浦激光器采用LD/LDA作泵浦源,其优势是数据处理效率高且质量好。由于泵浦灯具有较宽的辐射光谱和离子吸收带,一旦二者之间匹配不达标,会使得整个激光器的吸收效率降低到3%,且出现大功率的热效应下降的情况,导致光束质量与稳定性差异增大。另外一种LD/LDA的发射谱线则通过温度调节的方式,改变激光雷达的发射波长,保证峰值发射波长与用离子吸收带处于理想的配比状态,提高工作效率。这种高频率的激光发射器噪声特性好、效率高、有质量保证,可以实现高频率工作,低输出功率,因此,已经受到了社会各界的广泛关注和认可。
4.2 阵列探测技术
在激光雷达技术的应用过程中,最主要的技术是阵列探测技术。为了进一步促进该项技术的合理运行,要根据实际情况,解决发射激光的利用率问题和一致性问题,这2个问题是困扰该项技术发展的主要瓶颈。由于探测器在体系化管控存在一定的间隙,采用单个激光进行照明时,其所收集的激光覆盖到整个阵列探测器表面,会导致能量的损失,导致在实际工作中需要对光能量进行二次采集。通过对发射光的图样进行设计,使发射图样与探测器匹配,可以确保激光发射和接收的能量具有一致性,提高光的利用效率,使通道内部的探测器能量的获取途径一致化。
5 结语
综上所述,空间自动导航着陆雷达技术还有很大的研究空间。随着对太空探测深度的进一步提升,必须要根据实际情况进行创新,提高激光成像雷达技术的应用效率,实现各项资源的合理互补,提高机器设备的导航精准效率,促进该项技术的可持续性进步与发展。
参考文献
[1]卜弘毅.空间自动着陆导航激光雷达关键技术研究[D].上海:中国科学院上海技术物理研究所,2009.
[2]李磊,董光焰,彭凤超.空间自主着陆导航激光雷达技术研究[J].电光系统,2015(1):34-37.
