一种雷达测速设备准确度评估方法
2020-10-20张博君李伟
张博君 李伟
摘 要:该文介绍了连续波多普勒雷达测速照相系统的构成,并对其进行了误差测试与分析。对影响雷达测速设备测速准确度的因素进行了分析,并提出了一种利用采集的雷达测速数据与影像位移换算速度数据进行对比的方法,来评估雷达测速的准确度。希望可以为相关人员提供参考。
关键词:雷达测速;测速照相设备;多普勒效应
中图分类号: TN95 文獻标志码:A
0 引言
无线电技术发展于20世纪初期,随着人们对电磁波认识的不断深化,电磁波技术得到迅速发展,它帮助人类将通信联系的距离延展几千公里,却只要短短几秒就可完成[1]。近30年来人类将电磁波技术应用在交通执法上,利用雷达多普勒效应原理计算出车辆速度,进而判断该车辆是否超速行驶。雷达测速照相设备不论是传统或数字式,都发生过测速不准确的问题,因此本文主要探讨雷达测量结果对雷达测速照相设备本身的影响。
雷达发射电磁波到物体,经由物体反射后,再得到该物体速度的过程称为多普勒效应原理,也就是应用雷达所发射的电磁波频率与接收电磁波频率之差,来推算目标物移动的速度[2]。雷达按照波形可分为脉冲雷达、连续波雷达2种。在无能量产生的情况下,经过一段静止时间,随之产生一极短时间的发射能量,该种能量波形被称为脉冲波[3]。连续波雷达与脉冲波雷达最大的不同处在于,连续波雷达是持续且连续不断地发射能量的,按发射信号的形式又可分为固定频率及调频连续波雷达[4]。根据多普勒效应原理,当信号从一个移动目标物反射时,信号的频率会发生偏移。一个移动目标物的回波频率的偏移将决定目标物与雷达的相对速度[5]。目前应用于交通执法系统中的测速雷达大多为固定频率的连续波雷达。
1 连续波多普勒雷达测速照相系统构成及操作原理
1.1 系统构成
连续波多普勒雷达测速照相系统可分成硬件及软件2个部分,硬件部分主要包含雷达系统、控制主机系统、照相机等模块。软件部分负责对各硬件间的信息流进行沟通与整理。
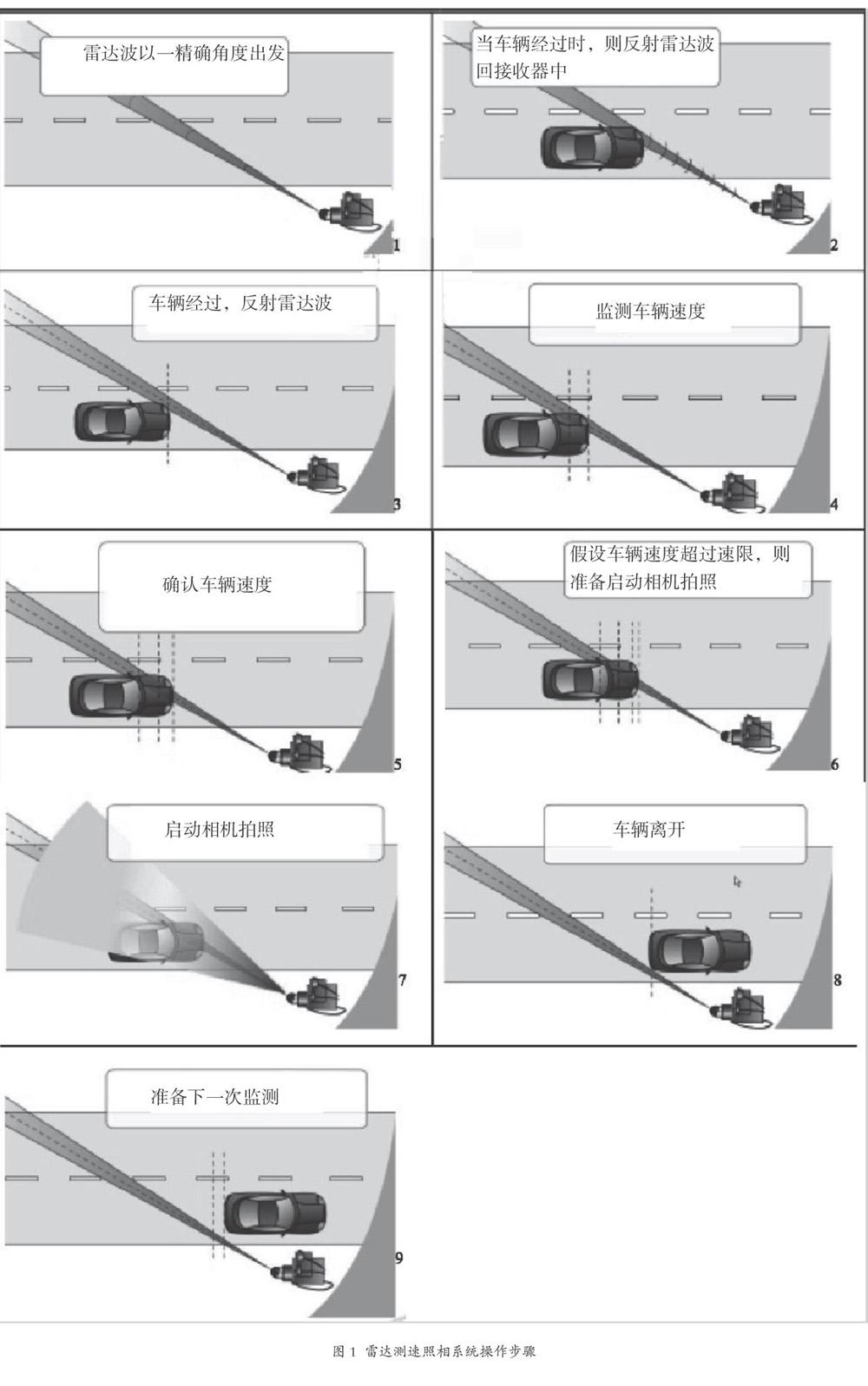
1.2 操作原理
雷达测速照相系统操作步骤如图1所示。
2 雷达测速照相系统设备误差测试与分析
2.1 雷达测速照相设备误差分析
该文对交通测速雷达进行了分析,根据多普勒效应,当雷达波遇到汽车返回时,有下面的关系成立:
式中:f 0'为雷达监测到物体后反射的频率,f 0为雷达波发射频率,VR为汽车的速度。从式(1)中可以看出,接收到的反射信号频率f 0'是由两项相加而成的,第一项是由雷达波产生的发射频率即公式中的f 0,第二项是由物体运动引起反射信号的多普勒频移,当汽车驶近雷达波时,VR为正,当汽车驶离雷达波时,VR为负,C为电磁波在空间的传播速度,可将公式(1)表示成如下形式:
2.1.1 针对的来源分析与减小措施
一般交通用测速雷达本身为单一连续频率,因此确认f 0是不随时间变化的频率,它的稳定度高,可以不考虑它的误差影响,误差主要由发射时的频率之差Δf 0所引起。Δf 0就是实际频率与所要求的频率不一致造成的误差,所以相关技术规范规定都要求误差必须<±0.2%,以求取最准确的频率范围。同时Δf 0还受雷达本身所加电压以及工作环境的温度变化等因素影响。因此,必须确认整体电压的稳定性与采用恒温措施保持温度的稳定,避免变化过大造成影响。
2.1.2 针对1/N的来源分析与减少措施
如果将引起的测量误差控制在±0.2%内,那么误差来源就主要由1/N来决定。对应不同的测量速度,在速度测量时间T内所记录的变化周期个数N有不同的取值,由公式3可知:当VR一定时,T越大,则记录的变化周期个数N越多,则1/N就越小,误差也就越小。因此,适当增加标准间隔时间T是减少误差的一种方法。另一方面来说,如果增加了T,也增加了速度的测量时间。
2.1.3 实际应用中对于雷达测速照相设备误差改善措施
从公式(1)中可以了解到,实际应用过程中的频率误差经过国家标准化委员会处理后,可以获得比较可靠的准确度。但对于1/N的来源控制则是一项非常困难的挑战,因为当雷达测速照相设备在户外进行违规车辆监测时,会因为现场实际环境产生无法预测的状况。为了增加雷达速度数据的可验证性,可以增加监测时间以获取较多的速度数据进行比对,从而筛选出不正确的速度数据。
2.2 雷达测速准确性测试方法
为了有效确认雷达架设于户外环境时,测量速度是否有不确定度情况发生,必须进行户外实际测试。测试车道上需要标示有距离线,可用于后期图像数据处理时提取距离信息。测试环境同时应具备开放的车辆行驶环境。
每当车辆通过时,受检验的雷达测速照相设备必须在一固定时间(一般设定为1 s)内拍摄2张以上照片,这样便可利用“速度=距离/时间”的公式推断正确的速度,将雷达所测得的速度与影像所计算到的速度互相比对。
通过测试现场资料的搜集,确认雷达不确定度发生的概率与速度误差。并利用Pearson积差相关系数来检验雷达监测器与影像位移差所取的数据相关程度,其公式为:
(7)
式中:-1≤r≤1,r为Pearson积差相关系数,S(X,Y)为雷达检测器速度值误差率与影像位移速度值误差率的乘积和,为雷达检测器速度值误差率的标准偏差和,为影像位移速度值误差率的标准偏差和,X为雷达监测器速度值,为雷达监测器速度值的平均值,Y为影像位移速度值,为影像位移速度值的平均值。
3 雷达测速照相系统测试数据分析方法
3.1 速度准确率分析
准确率为衡量雷达监测速度与影像位移速度间的差异,其计算公式如公式(9)所示,其中X为雷达监测器速度值,Y为影像位移速度值。
3.2 监测效果分析方法
雷达监测器的监测效果,可利用影像位移速度结果与真值间的平均误差率或误差率标准偏差来评估。
3.3 积差相关系数
Pearson积差相关系数是检核雷达监测器与影像位移速度数据间的相关程度,其公式如公式(7)所示。由系数r可判断雷达监测器的准确度,即当相关系数r越接近1,表示雷达监测器所监测到的速度数据越接近影像位移差所测得的速度数据。
4 结语
该文介绍了连续多普勒雷达测速照相系统的构成,对雷达测速过程产生误差的因素进行了分析,并提出了对测速数据准确率及监测效果的评估方法。为雷达测速类产品的测速准确度评估提供了较好的方法依据。
参考文献
[1]杜军,程娅,张晓晓,等.提高相位调制多普勒激光雷达频移测量范围的方法[J].光学学报,2019(12):43.
[2]张龙,王兴理,马婧,等.脉冲雷达测速方法的改进研究[J].现代雷达,2019(10):115.
[3]Li XL.A Novel Signal Separation and De-Noising Technique for Doppler Radar Vital Signal Detection[J].Sensors,2019(11):234.
[4]章薇.机动车雷达测速仪在道路交通应用中存在的问题及改进方法[J].中阿科技论坛,2019(6):76.
[5]彭华海.机动车雷达测速仪检定装置在服务公安交通执法中的应用探究[J].中国标准化,2019(2):80.
