割草机器人自动控制系统
——基于智能视觉和人工算法
2020-10-19马耀锋李红丽
马耀锋,李红丽
(郑州工程技术学院,郑州 450044)
0 引言
对于移动机器人而言,传统的路径规划指点到点的最优路径规划,其目标是寻求一条从起始点到终点的无碰撞的最优路径,该路径大多是点到点的线段序列。割草机器人的路径规划是基于全区域覆盖运行的路径规划,全区域覆盖的路径规划目标是产生一条有效路径来覆盖工作环境的每块可达区域。因此,在进行作业区域目标识别时与传统的移动机器有所不同,为了实现割草机器人作业目标识别和路径规划的全区域覆盖,需要设计智能视觉系统,并采用人工智能算法来求解机器人的移动路径,从而得到较高的割草作业效率和精度。
1 割草机器人的发展现状及总体设计
随着经济发展和城市建设步伐的不断加快,城市区域的绿化程度也大大提高,公园、足球场地和高尔夫场地等草坪面积也逐年增加,这些草坪均需要进行维护,其中以草坪的割草作业最为繁重。草坪的割草修剪工作不仅枯燥,而且工作量大、重复性高,作业过程中会消耗大量的人力和物力。为了降低草坪维护的劳动强度,割草机器人应运而生,但其智能化程度还不高,相对于普通的割草机器人,智能割草机器人主要有以下几个方面的优势:
1)与传统的人工作业机器人相比,智能化机器人不需要人工干预或者操作,本身搭载了微处理器,可以结合传感器采集的信息对环境进行判断,并动态规划作业路径,实现自主作业。
2)具有更加灵敏的传感单元和控制单元,对环境的监测范围广、控制精度较高,在进行作业时不容易造成安全事故。
3)采用自动控制系统,可以返回预定地点补充能源,并使用清洁能源,相比传统的割草机器人具有更小的噪音,因此更加环保。
图1为Friendly Machines公司的研发Robomow割草机器人。在进行作业区域识别时,用户需要在草坪的边界和障碍物位置增加电缆,以防止机器人误入,并通过电缆信号进行导航。在遇到没有设置电缆的障碍物时,主要通过超声检测来简单避开障碍物,而没有智能化的视觉系统,使控制系统过于复杂,且对于作业区域边界的检测精度也不高。

图1 Friendly Machines公司的 RobomowFig.1 Robomow of friendly machines company。
如图2所示,相对于以电缆和超声获取信号,采用智能视觉设计割草机器人将具有更高的作业区域识别精度,从而提高作业效率。工作时,智能视觉系统可以将信息传送到核心处理器,处理器通过图像处理后对作业区域进行识别;识别完成后,可以发出信号控制电机驱动器进行割草,控制直流电机进行行走作业,从而实现自主化割草作业。

图2 基于智能视觉的割草机器人Fig.2 Mowing robot based on intelligent vision。
2 割草机器人控制系统设计
割草机器人智能视觉系统主要是采用光电转换装置实现机器视觉功能。在进行待收割草的信息采集时,利用光电转换装置可以将采集到的杂草图像信号转换为视觉系统可以处理的信号;在进行待割杂草的信号采集时,选用CCD相机和图像传感器作为采集设备,在采集信号的同时还可以对信号进行处理和转换。
采用智能视觉装置初次采集到的图像一般是彩色图像,不能直接被智能视觉系统进行目标检测时所识别,因此需要将彩色图像转换为灰度图像,并对图像进行分割和边缘检测。在进行图像处理时可以采用Roberts算子,该算子可以有效检测出图像灰度或图像中色彩比较突出的部位,通过图像色彩梯度的变化,来对图像进行分割和边缘检测。假设利用CCD相机采集杂草得到的图像色彩分布为一个函数f(x,y,λx,y),对于一个像素点(x,y),其色彩变化在x,y方向的表达为
(1)
在数字图像中,fx、fy可用x、y方向的差分(Δx,Δy)表示,即
(2)

(3)
其中,p、q为阶数;s为整个图像的区域。
将图像进行二值化处理后,可得f(x,y)=1,则零界矩m00可以表示为
(4)
零阶矩就是图像目标区域的面积,其一阶矩为
(5)
区域的质心(xc,yc)表示为
(6)
为了使质心区域能够被更好地识别,可以采用人工聚类分析算法。基本步骤如下:


(7)
其中,Nj为第j个聚类域Sj中所包含的样本个数。
将节点的均值向量作为新的聚类中心,利用聚类准则使函数值最小,则
(8)

通过人工算法对质心位置进行分类后,便可以利用智能视觉对质心点位置进行识别,从而得到作业区域。整个硬件系统采用自动化控制装置,总体的框架如图3所示。
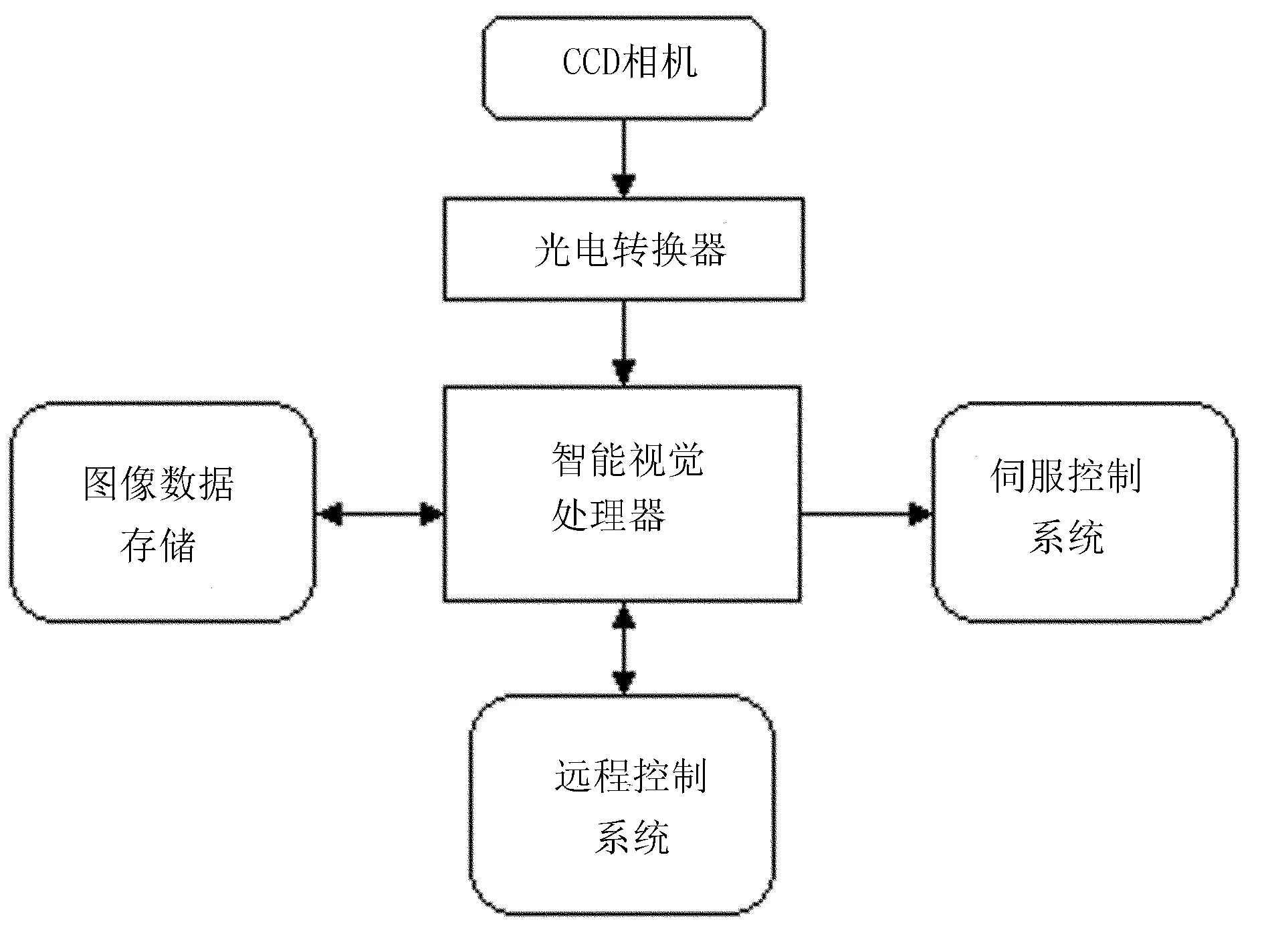
图3 割草机智能视觉系统硬件基本框架结构Fig.3 The hardware basic framework of intelligent。
vision system for mower
割草机智能视觉系统主要由5部分组成,包括智能视觉处理器、CCD相机采集设备、伺服控制系统、图像数据存储器和远程控制系统。在进行割草区域目标识别时,首先利用CCD相机对目标作业区域的信息进行采集,然后通过光电转换装置将信号传送给智能视觉处理器,处理器实现对图像数据的保存、远程监测和伺服控制系统的控制。其中,作业区域目标的检测采用反馈调节的方式,其流程如图4所示。

图4 目标作业区域识别反馈调节Fig.4 Feedback regulation of target operating area recognition。
割草机作业区域图像信息采集完成后,利用智能视觉处理系统进行图像处理,得到质心位置;通过对质心位置的聚类分析,识别得到作业区域,最后进行割草作业。在进行割草机作业区域的识别时,采用了反馈调节的方式。当作业区域识别失败时,可以利用反馈调节的方式重新进行图像处理,最终得到作业目标区域。
3 割草机器人控制系统测试
为了验证基于智能视觉和人工算法在割草机器人控制系统上使用的可行性,以不规则区域的割草人路径规划为例,对控制系统的路径规划能力进行了测试。农业除草机器人的作业路径规划如图5所示。路径规划时,可以将农作物田垄作为导航线。与一般的农业除草机器人有所不同,割草机器人的作业面积一般较大,且作业区间并不规则。

图5 农业除草机器人路径规划示意图Fig.5 The path planning of agricultural weeding robot。
在进行路径规划时,除草机器人主要以农作物田垄为依据,而割草机器人的作业区域较为随意,并且一般都存在障碍物。为了实现割草机器人的自主路径规划,采用第2节中的智能视觉系统对路径进行规划,得到的路线结果如图6所示。

图6 割草机器人作业区域识别Fig.6 The working area recognition of mowing robot。
图6中,由于有障碍物存在,因此在进行割草区域路径规划时首先要对作业区域进行区域划分。本次以其中的一个区域为例,通过求取质心位置和人工聚类分析算法,成功得到了作业路径规划线路。
为了验证基于聚类算法和智能视觉系统的割草机的优越性,将其与普通的割草机器人进行了路径规划时间对比,如表1所示。由表1可以看出:采用智能视觉系统的割草机器人规划时间明显缩短,从而提高了作业区域的定位效率。

表1 路径规划时间对比Table 1 Time comparison of path planning。
将智能视觉系统割草机器人的作业区域识别覆盖率与其他割草机器人进行了对比,结果如表2所示。由表2可知:采用人工聚类算法可以明显提高作业区域识别的覆盖率精度,从而提高割草机器人总体的作业精度。

表2 覆盖精确度对比Table 2 The comparison of coverage accuracy。
4 结论
为了提高割草机器人作业目标区域识别的效率和精度,将智能视觉和人工聚类智能算法引入到了机器人控制系统的设计上。工作时,利用CCD相机采集和转换信号后,通过处理器计算质心位置,并对位置进行聚类分析,从而可以有效分解、识别作业目标区域,以及进行路径的规划。对控制系统的性能就行了测试,试结果表明:基于智能视觉和聚类算法的机器人控制系统的效率和精度均较高,可以满足智能割草机器人控制系统的设计需求。
