分布式视频编码技术在收割机快速导航系统中的应用—基于DSP块
2020-10-19廖庆涛
廖庆涛
(重庆工业职业技术学院 智能制造技术学院,重庆 401120)
0 引言
在传统农业中,收割机驾驶员在复杂的作物田间作业时,必须反复工作数小时才能沿着作物垄引导联合收割机进行收割作业。一种用于防止疲劳并提高生产率和操作安全性的解决方案,是通过集成自动导航系统来引导收割机驾驶员进行作业的。近年来,各国学者都在进行收割自动导航系统的研究,也取得了一定的进展。本文提出了一种基于DSP块的分布式视频编码技术的收割机快速导航系统,可以根据作业区域形状对收割路径进行导航。
1 分布式视频编码技术
1.1 DVC理论基础
DVC(Distributed Video Coding)是20世纪70年代由Slepian和Wolf为无损编码建立分布式源编码(DSC)信息理论界限,以及Wyner和Ziv在解码器上使用SI(Service Information)进行有损编码的结果。无损DSC指的是通过利用统计依赖性,分别对两个相关随机源进行编码和联合解码。
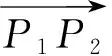
假设两个统计依赖性的随机序列分别为X和Y,在对X和Y进行编解码的过程中,可以通过熵编码实现RX和RY的速率,使得RX≥H(X)和Ry≥H(Y)。其中,H(X)和H(Y)分别是X和Y的熵。Slepian-Wolf(SW)定理证明了联合解码可以获得更好的速率,并且能够对总速率RX+Ry给出更严格的界限。由SW建立的允许速率区域对应于图1中的阴影区域,其表达式为
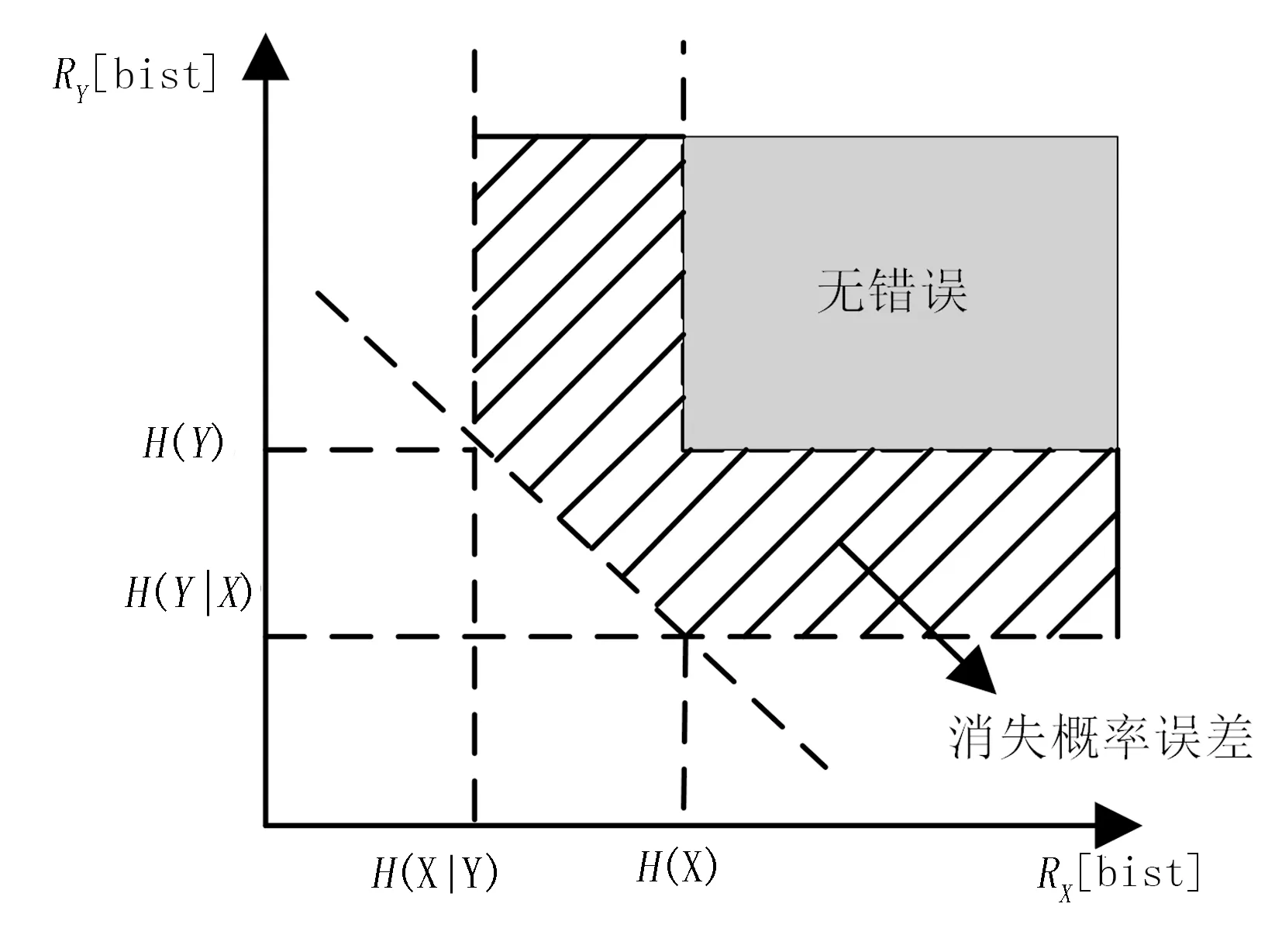
图1 Slepian-Wolf界限定义的可实现速率区域Fig.1 Realizable Rate Regions Defined by Slepian-Wolf Boundary
RX≥H(X|Y),RY≥H(Y|X)
(1)
RX+RY≥H(X,Y)
(2)
用SI方法实现对视频的解码被认为是DSC的特例。在这种情形下,X源取决于某些SI的Y源,其对应于图1中所示的区域边界上的灰色区域。不久之后,Wyner和Ziv在解码器中建立了用于有损压缩的边界,作为对SW定理中SI的扩展。在这种情况下,X源在编码中不再取决于SI的Y源,而解码器可以访问SI以产生具有一定失真D的X源。
1.2 DVC编解码系统的构成
本文采用的分布式视频编码DVC系统如图2所示。视频数据进入编码器后,帧会被分成两组:第1组是关键帧,会被送到常规AVC / H.264帧内编码器;第2组是WZ帧,在WZ编码之前会对WZ帧数据进行预处理、变换然后量化,接着会使用与AVC/H.264中相同的4×4可分离整型变换,其具有与离散余弦变换(DCT)类似的特点。然后,将相同的频带的数据帧组合在一起并提取不同的位平面,将其送到turbo编码器。
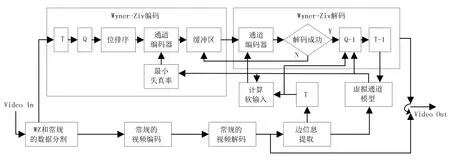
图2 分布式视频编码DVC常规架构Fig.2 The Conventional Architecture of Distributed Video Coding DVC
在解码器处,关键帧通常会被先解码,用于生成WZ解码器的SI。在单视图的情况下,运动补偿时间插值(MCTI)用于生成SI。为此,MCTI使用关键帧来执行运动估计。MCTI是在中点内插得到的运动矢量,如图3所示。
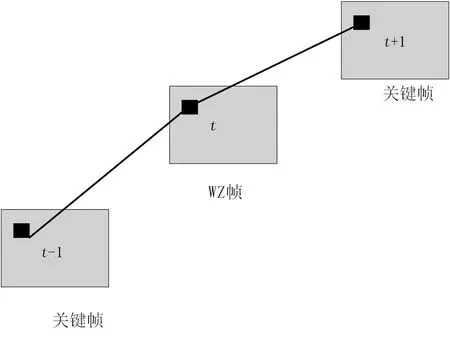
图3 运动补偿时间插值(MCTI)示意图Fig.3 Motion Compensation Time Interpolation (MCTI) Diagram
虚拟信道用于模拟原始帧和SI帧中DCT系数之间的相关性,其显示DCT系数的残差遵循拉普拉斯分布。在编码重建过程使用SI和解码箱来恢复原始帧直到需求的质量值。若解码器适合于对应于解码的二进制位的量化间隔,则解码器接收SI的DCT值作为重构的值;否则,其会将DCT值截断为量化间隔。
本文研究的分布式视频编码DVC系统方案是以解码器驱动的,系统中编码器的奇偶校验位的请求是经由反馈信道执行的,以保证成功解码。若解码的位平面的错误概率低于10-3,且其CRC与从编码器接收的CRC匹配,则认为解码成功。
2 收割机快速导航系统平台
本文研究的收割机快速导航系统平台示意图如图4所示。收割机(PRO688,久保田)的发动机功率为49.2kW,质量为2780kg,喂入量可以达到2.5kg/s,割幅宽度为1.45m。收割机系统中采用基于CAN总线的网络标准接口,用于接收来自本研究中导航系统控制设备的指令。
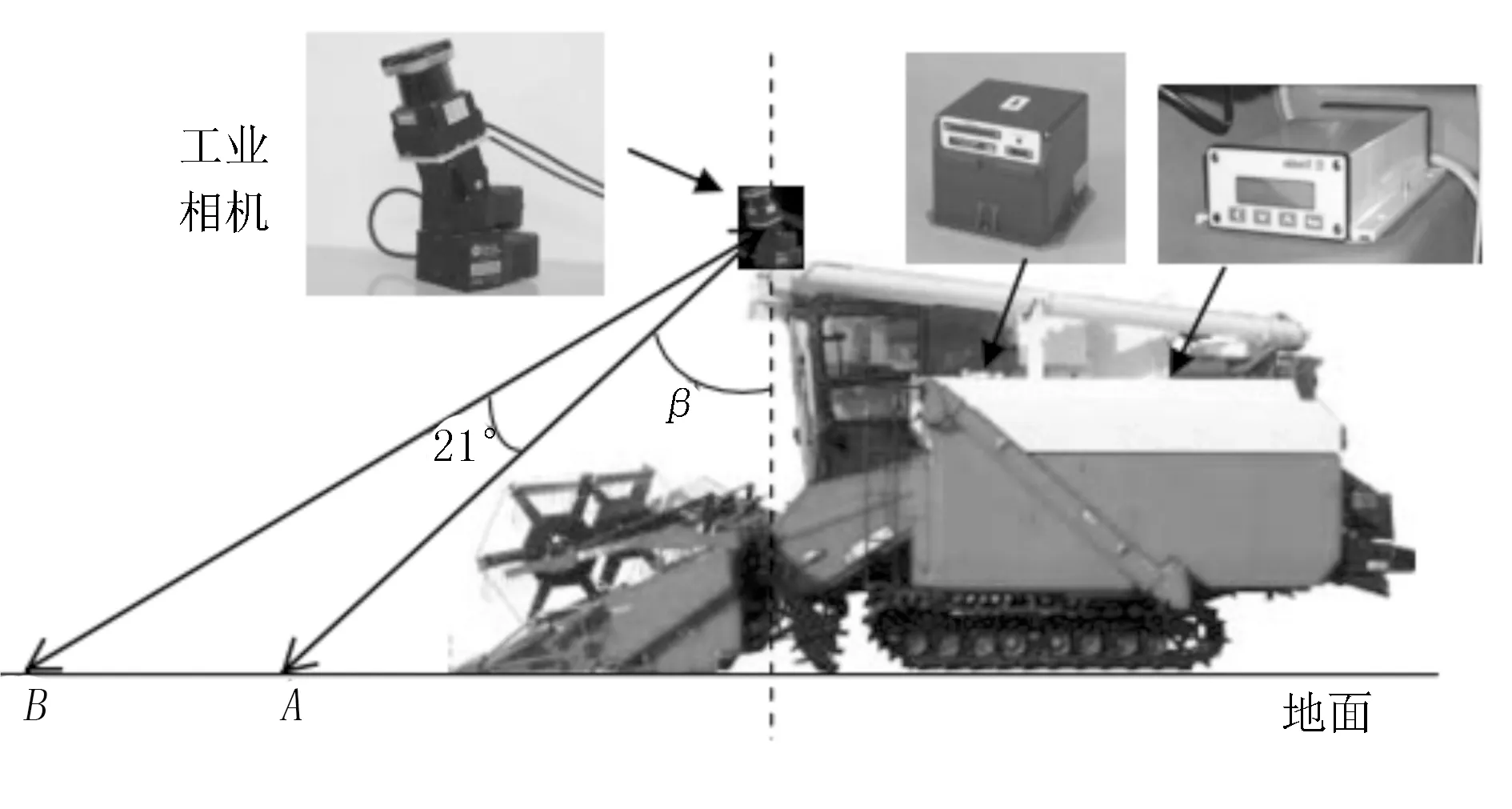
图4 收割机快速导航系统平台示意图Fig.4 Drawing of Rapid Navigation System Platform for Harvester
收割机快速导航系统的关键元件是工业相机,通过平移倾斜装置安装在收割机驾驶室上方。该工业相机距地面约2.8m,为Microvision公司的MV-EM120M/C工业相机。平移倾斜装置用于在垂直平面内在21°的范围内上下倾斜工业相机,以获得在收割机前面的A和B之间的视频图像信息。工业相机和平移倾斜装置的规格如表1和表2所示。
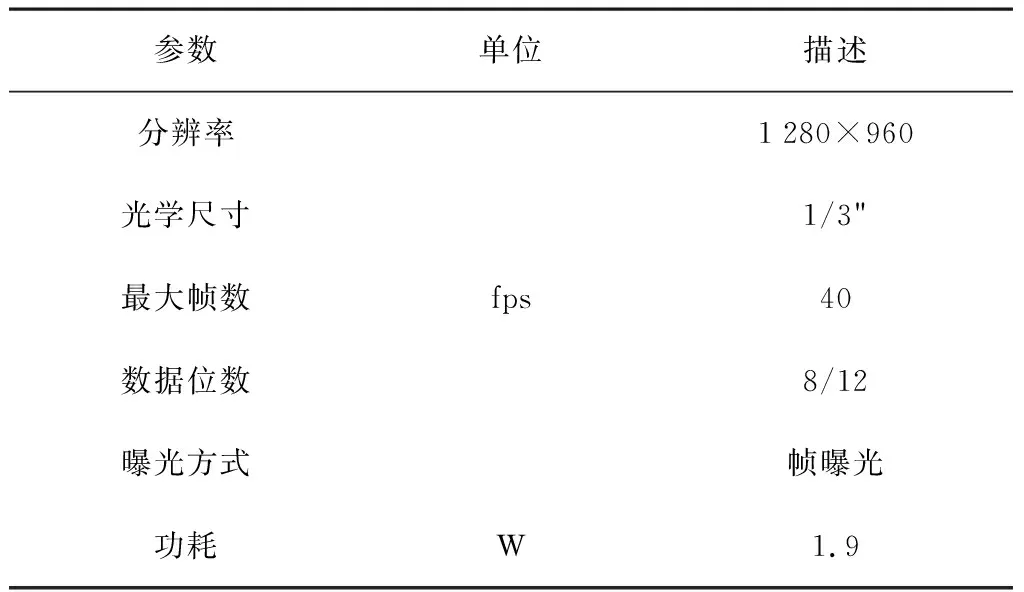
表1 工业相机规格描述Table 1 Specification descriptino of industrial camera
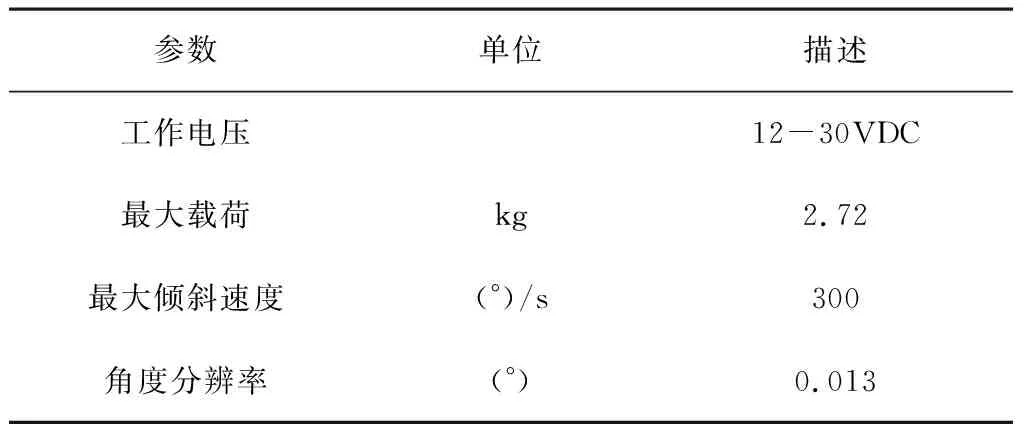
表2 平移倾斜装置描述Table 2 Pan tilt device description
3 收割机快速导航系统的实现
3.1 收割机工作区域模型
为了导航收割机沿着作物区域行进,前提是了解田地形状。在本文研究中,通过工业相机在行栽大豆田中测量距离数据的空间分布来模拟田间剖面,以建立收割机工作区域模型。收割机在笛卡尔坐标系下的实际单帧测量如图5所示。

图5 收割机工作区域模型示意图Fig.5 The model sketch of harvester working area
图5描绘了检测到的大豆植物的空间分布,该区域模型看起来像一个不完整的正弦波或方波。本研究中,给定区域的作物最大高度HC和行间距d分别为1m和0.75m。由于系统存在一定的误差精度,左边的一些异常值直接丢弃,可以得到一系列测量值g(i),i= 0,...,N-1。其中,N为测量点的数量。本文中,工作区域分布被建模为5个周期方波,周期为P,幅度为HC,脉冲宽度为W,无初始相位。第1个周期f0(t)的表达式为
f0(x)=A[u(x)-u(x-W)]
(3)
其中,u(x)表示x处的单位值。
整个完整的工作区域可以用一个方波函数f0(t)表示,其表达式为
f(x)=f0(x-nP),n=0,+/-1,+/-2,…
(4)
3.2 收割机工作区域的计算
由于场分布可以表示为方波,因此可以计算出模型系列f(x)与工业相机测量的工作区域样本序列g(i)之间的最大相关性Cmax,来确定田间的大豆作物。计算延迟d时刻的相关性Cmax的表达式为
(5)
其中,mf和mg是相应系列的平均值;f(i)是对应于g(i)的f(x)样本序列,i=0,1,...,N-1。若f(i-d)超出f(x)的范围,则忽略该采样点。
采用平移倾斜装置,在垂直平面中上下旋转工业相机获取同一行但不同距离的农作物位置。作物行和联合收割机间距离示意如图6所示。
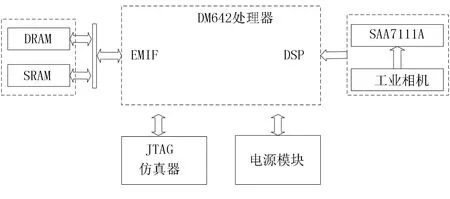
图6 作物行和联合收割机间距离示意图Fig.6 Diagram of the Distance between Crop Rows and Combines
其中,GPS用于收割机的自身实时定位;IMU为惯性测量装置;P1处的农作物通过工业相机以48°的倾斜角拍摄得到;P2是在倾斜角度为69°时检测到的另一作物的位置。P1、P2间的直线可以认定为分离切割与未切割区域的作物行,其在笛卡尔坐标系下的表达式为
ax+by+c=0
(6)
其中,a、b和c为直线系数值。
可以将横向偏移ε和偏转角δ作为两个参数来确定转向角φ,表达式为
φ=A1ε+A2δ
(7)
4 快速导航系统软硬件设计
4.1 收割机快速导航系统硬件设计
采用DM642 DSP芯片为核心处理器,其专用于数字媒体和图像处理应用,主频可达600MHz,处理性能高达4800MIPS,拥有2个20位的视频口,可实时实现多路音频/视频信号的输入/输出及编解码运算。收割机快速导航系统硬件框架如图7所示。
图7 收割机快速导航系统硬件框架Fig.7 Hardware Framework of Rapid Navigation System for Harvester
由图7可以看出:收割机快速导航系统硬件主要由数据存储、电源模块、视频采集、JTAG仿真器和视频编解码等5部分组成。其工作流程为:工业相机采集到大豆作物的视频图像信息,由SAA7111A进行简单的采样、量化处理;然后,由DSP利用DVC技术进行编解码处理,并保存在SDRAM存储器中;最后,为收割机工作区域模型的计算提供数据。
4.2 收割机快速导航系统软件设计
收割机快速导航系统软件包括SAA7111A芯片初始化、DSP的视频驱动、DVC编解码算法、工作区域模型与计算等程序,整个系统的核心是DVC编解码算法和工作区域模型及计算程序。系统软件各模块框架如图8所示。
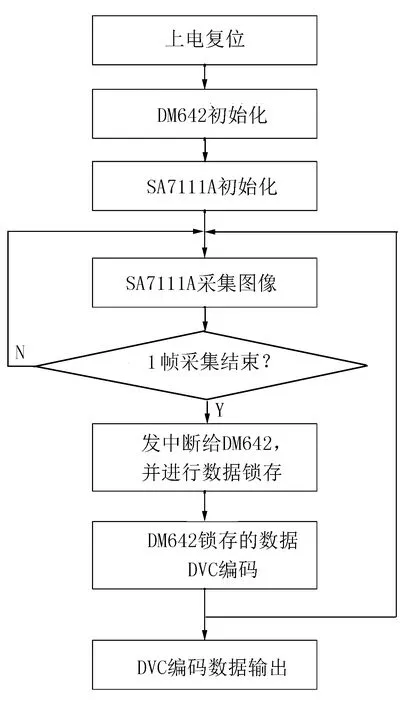
图8 系统软件各模块框架图Fig.8 Framework Diagram of System Software Modules
5 试验与结果分析
为了验证基于DSP块的分布式视频编码技术的收割机快速导航系统的有效性和可行性,对其进行了测试试验。试验是对一块矩形和扇形结合的大豆种植区域进行收割,结果如图9所示。其中,箭头为收割机行走方向。
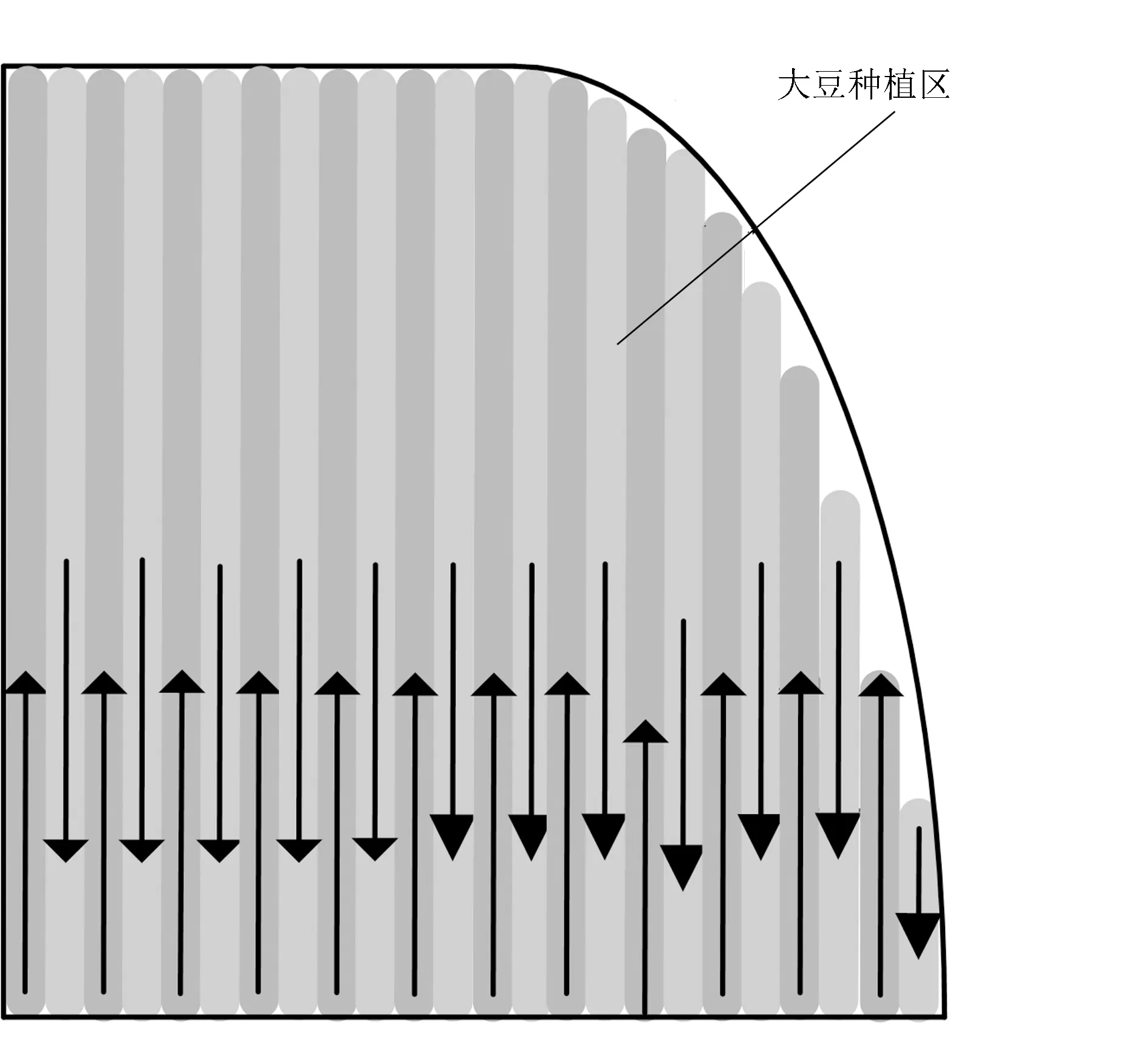
图9 收割试验结果图Fig.9 Chart of harvesting test results
在针对复杂地形进行收割作业时,基于DSP块的分布式视频编码技术的收割机快速导航系统能够规划出最短工作路线,实现快速导航功能,证明了系统的有效性和可行性。
6 结论
设计了基于DSP块的分布式视频编码技术的收割机快速导航系统,通过工业相机采集视频图像数据,利用DVC进行视频图像的编解码处理,得到大豆距离数据的空间分布,最后对作业工作区域进行建模分析,根据在同一行中检测到的作物植物的位置估计作物垄。试验结果表明:在针对复杂地形进行收割作业时,系统能够规划出最短工作路线,实现快速导航功能,证明了系统的有效性和可行性。