自走式高密度智能辣椒移栽机的研制
2020-10-19吴彦强侯加林黄圣海马根众董太新朱月浩
吴彦强,侯加林,黄圣海,马根众,董太新,朱月浩
(1.山东农业大学 机械与电子工程学院,山东 泰安 271018;2.山东省园艺机械与装备重点实验室,山东 泰安 271018;3.山东省农业机械技术推广站,济南 250013;4.诸城瀚泰机械科技有限公司,山东 诸城 261000)
0 引言
辣椒是一种茄科辣椒属植物,原产于中南美洲热带地区,明代末期经丝绸之路引入我国[1-2]。2017年,全国辣椒种植面积超过133万hm2,已经成为我国种植面积最大的蔬菜作物。山东省是我国辣椒主产地之一,近年来制干加工型辣椒产业发展迅速,在德州、潍坊、济宁等地形成了规模化种植、产业化发展的良好态势,加工型辣椒已成为当地农民增收致富的重要经济作物。
传统辣椒种植主要采用穴盘育苗移栽方式[3-6],可以缩短辣椒生育期,有效避免早春低温、倒春寒等自然灾害影响,保证栽植统一标准和大小的秧苗,还能有效预防病虫害。目前,辣椒移栽机主要为人工投苗、鸭嘴栽植的半自动移栽机[7-8],如美国Kennco制造公司床式移栽机、美国Checchi &Magli牵引式多行移栽机、意大利Ferrari公司的F-MAX系列移栽机、东风井关PVH1系列移栽机、富来威2ZBX系列移栽机及华龙机械2ZBLZ系列移栽机等。受限于人工作业速度和鸭嘴栽植器特殊结构,半自动移栽机作业效率较低,每行栽植效率不超过50株/min。为了解决半自动移栽机劳动强度大、作业效率不高的问题,国内外公司、高校和科研院所对全自动移栽技术进行了攻关。国外方面,意大利Ferrari公司研制了FUTURA TWIN系列全自动移栽机,采用气动机械手取苗只需1人喂入苗盘。澳大利亚Transplant Systems公司研制了全自动移栽机,1次最多种植18行,最大种植效率可达30 000株/h。日本YANMAR公司研制了PF2R、PW10系列全自动移栽机,适合小地块作业。国内方面,南通富来威农业装备有限公司研制了自走式蔬菜穴盘苗全自动移栽机,穴盘平直输送,机械手整排取苗、投苗分苗。倪有亮等[9]设计了一种全自动移栽机取送苗系统,可以将钵盘中取出的苗输送至栽植器。魏新华等[10]设计了一套穴盘苗全自动移栽机运动协调控制系统,苗盘横向进给和取苗机械手纵向往复运动分别由步进电机和伺服电机驱动,取苗机械手取/放苗动作和喂苗动作由气动部件控制,但该系统取苗效率有待进一步提高。李华等[11]研制了全自动蔬菜穴盘苗铺膜移栽机,可实现整形开沟、铺设地膜与滴灌带、自动移栽及覆土镇压等功能,移栽合格率为93.4%。王永维等[12]设计了移栽参数可调的栽植器试验台,基于该试验台研究了高速移栽条件下移栽速度、特征参数和吊杯倾角对栽植器移栽性能的影响规律,并基于研制的旱地蔬菜钵苗自动移栽机,对其不同植苗频率时的栽植性能进行了试验研究。国外全自动移栽机价格昂贵且不适合我国种植农艺要求,国内全自动移栽机仍处于关键技术理论研究和样机试验阶段。
本文从农机农艺融合角度入手,针对山东地区旱地辣椒生产,提出新型种植模式,研制具有开沟、取苗、栽植、覆土功能的自走式高密度智能辣椒移栽机。
1 辣椒种植模式
1.1 传统种植模式
山东地区辣椒多采用春秋茬栽培,4月中下旬定植,8月下旬开始收获,10月上旬收获结束;栽培方式采用平畦或垄作栽培,行距40~60cm,株距25~35cm;不同辣椒品种种植密度不同,一般每667m2种植4 000~6 000株[13-14]。
1.2 高密度种植模式
传统“一年一作”种植模式土地利用率低,影响农民收益,因此提出探索建立“大蒜(或小麦)+辣椒”新型轮作种植模式,改变当前山东地区辣椒春播秋收为主的一年一作传统种植方式。通过培育毯状辣椒苗(见图1)进行高密度移栽的作业方式,补偿辣椒晚播对产量造成的损失。辣椒种植采用平畦或垄作栽培,行距30cm,株距10~21cm,每667m2种植10 000株以上。

图1 课题组所育毯状辣椒苗Fig.1 The blanket pepper seedlings
2 整机结构与工作原理
2.1 整机结构
自走式高密度智能辣椒移栽机包括自走式底盘、悬挂装置、传动系统、栽植装置、移盘装置、开沟装置、覆土装置、调平装置和智能控制系统等,如图2所示。自走式底盘为水稻自走式插秧机底盘,采用HST无级变速系统。
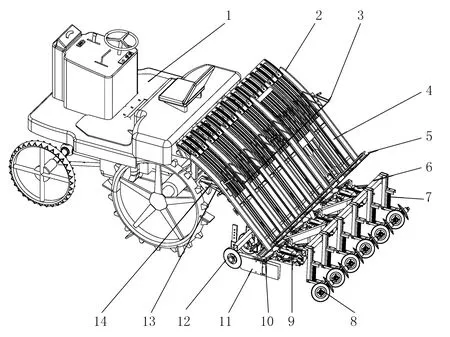
1.底盘 2.载苗台 3.保持架 4.送苗带 5.滑槽 6.覆土盘支架 7.仿形弹簧 8.覆土盘 9.行星齿轮箱 10.取苗爪 11.开沟器护板 12.开沟器 13.万向节 14.悬挂装置图2 自走式高密度智能辣椒移栽机结构示意图Fig.2 The structure of self-propelled high-density intelligent pepper transplanting machine
2.2 工作原理
工作时,人工首先将毯状辣椒苗放入到载苗台上,并使用保持架压住基质,防止秧苗移动。底盘HST无级变速系统通过万向节将动力分别传到后方栽植装置和移盘装置,移盘装置实现载苗台的左右往复移动和毯状辣椒苗的纵向间歇进给;栽植装置取苗爪沿特定的取苗轨迹从载苗台上重复取苗,同时开沟器开沟; 取苗爪在运动轨迹最下方将秧苗插入开沟装置开出的沟中,随后覆土镇压装置覆土并将辣椒苗两侧土块压实,完成整个工作过程。
2.3 主要技术参数
外形尺寸/mm:3 660×2 595×2 330
整机质量/kg:950
配套动力/kW:20
栽植行数/行:6
行距/mm:300
株距/mm:100~210
栽植深度/mm:30~100
倒伏率/%:≤7
伤苗率/%:≤5
漏栽率/%:≤5
重栽率/%:≤
3 关键部件的设计
3.1 栽植装置设计
栽植装置包括取苗爪、行星齿轮箱、秧针、推苗器等,整个栽植过程由取苗、夹持输送、插苗和回位4个步骤组成。工作时,取苗爪的秧针插入毯状辣椒苗基质后进行取苗,取苗爪在行星齿轮箱带动下沿取苗运动轨迹运行到最下方,取苗爪推苗器动作将辣椒苗从秧针上面推出插入土壤,随后推苗器复位,取苗爪回位,继续进行下个栽植过程。为了保证栽植过程中取苗爪取苗时精准低损取苗、快速推苗和取苗爪迅速回位,栽植装置运动轨迹设计成“腰子”形状[15],如图3所示。

1.秧针 2.推苗器 3.行星齿轮箱图3 栽植装置取苗运动轨迹示意图Fig.3 Dynamic trajectory diagram of the planting device of the pepper transplanting machine
3.2 移盘装置设计
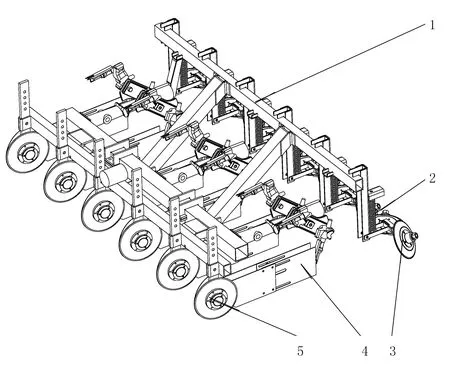
移盘装置的作用是实现毯状辣椒苗纵向和横向不间断的进给,保证栽植装置取苗爪连续取苗,主要包括载苗台、保持架、滑槽、双螺旋轴[16-17]、拨叉、六方轴及送苗带等,如图4所示。

1.载苗台 2.保持架 3.覆土盘支架 4.覆土盘 5.滑槽 6.六方轴 7.带轮 8.送苗带 9.双螺旋轴 10.滑块 11.机架 12.调平装置图4 移盘装置结构示意图Fig.4 Schematic diagram of the plate shifting device
其中,滑槽固定在机架上,载苗台可沿滑槽左右摆动,双螺旋轴通过滑块与载苗台连接,双螺旋轴旋转带动滑块往复运动,实现横向移盘。机器右侧与双螺旋轴同轴安装有拨叉,六方轴上设有凸台,每当取完1整排毯状辣椒苗,拨叉会碰到凸台。此时,六方轴旋转带轮旋转一定角度,进而使送苗带动作,从而实现毯状辣椒苗纵向进给。
3.3 开沟覆土装置设计
开沟器作用是为取苗爪所取辣椒苗开出合适的垄沟且在取苗爪放苗之前避免垄沟两侧土块滚落到垄沟内。本文采用如图5所示的双圆盘开沟器,在开沟器后方连接有护板,形成25°~35°夹角,以保护垄沟在辣椒苗栽植之前不受破坏。覆土盘的作用是对栽植到垄沟中的辣椒苗覆土并将辣椒苗周围土壤压实,覆土量和覆土镇压力可调整,土壤紧实度高,保证了秧苗成活率。
1.覆土盘支架 2.仿形弹簧 3.覆土盘 4.开沟器护板 5.开沟器图5 开沟覆土装置结构示意图Fig.5 Schematic diagram of Ditching and covering device
3.4 智能控制系统设计
智能控制系统包括载苗台平衡控制及缺苗报警控制等。为保证载苗台始终与地面平行及栽植效果,采用JCQJ-01-P2-90-G3倾角传感器监测载苗台状态,并将平衡信号传递给PLC;PLC做出判断后通过电磁阀调整平衡油缸动作,使载秧盘始终保持水平,保证秧苗栽植深度一致;缺苗传感器(限位开关)用于检测载秧盘上辣椒苗是否少于设定数量,缺苗时PLC控制缺苗等闪烁并发出语音报警信号,提示工作人员及时补充秧苗。
4 性能试验
4.1 试验条件
试验于2018年9月30日在诸城瀚泰机械科技有限公司林家村镇试验田进行,采用毯状辣椒苗为试验对象,平均株高160mm,基质含水率32%。试验地进行了耕翻整地,地表平整,土壤含水率为17%,满足试验条件。试验现场如图6所示。

图6 样机试验现场Fig.6 Field experiment of the transplanting machine
4.2 试验方法和结果分析
试验按照《JB/T 10291-2013旱地栽植机械》行业标准[18]进行。样机首先进行试运行,调整栽植株距为16cm,栽植深度为5cm;随后任意选定3行将毯状辣椒苗放入载苗台,并用保持架压好等待试验。机器每次试验行走30m,作业后在每行随机选取长度为15m的测定段,测定段内设计株数为95株,统计测定段内的漏栽、重栽、倒伏、伤苗、埋苗的株数及合格植株的株距和栽植深度,记录数据后分别计算漏栽率、重栽率、倒伏率、伤苗率、埋苗率、栽植合格率、株距变异系数及栽植深度合格率等指标。重复试验3次,取其平均值,结果如表1所示。
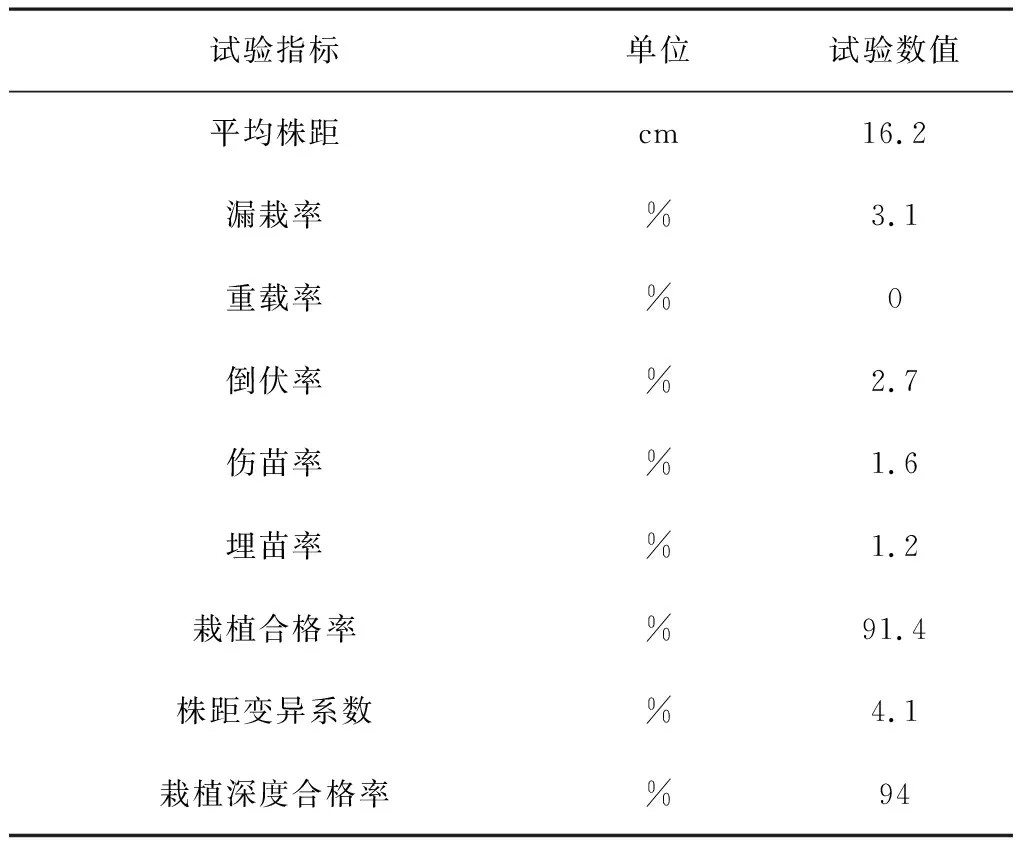
表1 试验结果Table 1 Results of the transplanting experiment
由表1可知:该辣椒移栽机可以较好地实现高密度栽植,且栽植株距稳定。当设定株距为16cm时,株距变异系数为4.1%,整体栽植合格率为91.4%,能满足实际使用需求。
5 结论
1)提出了基于农机农艺相融合的高密度辣椒栽培模式,设计了自走式高密度智能辣椒移栽机。该机可实现6行辣椒同时移栽,一次完成开沟、自动送苗、自动取苗、自动栽植及覆土等功能,只需1人操作,可有效提高栽植速度、降低劳动强度。
2)田间试验结果表明:该机各项指标符合行业标准要求,株距变异系数小,栽植深度合格率高,作业效果稳定,符合设计要求。
