露天煤矿巡检机器人的设计及现场测试
2020-10-18徐金鑫
徐金鑫
(山西煤炭进出口集团河曲旧县露天煤业有限公司, 山西 忻州 034000)
引言
带式输送机为煤矿生产的关键运输设备,随着采煤技术和采煤设备自动化水平的提升,煤矿采煤能力不断提升,带式输送机朝着长距离、大运量以及大功率的方向发展。在实际生产中带式输送机可能存在跑偏、撕裂、打滑等事故的发生,为避免带式输送机事故的发生影响煤矿的正常生产,需对带式输送机的运行状态进行监测。传统带式输送机的人工巡检的效率低、监测效率低、监测精度低且工作人员劳动强度大[1],为解决人工巡检的问题需要为露天煤矿配置巡检机器人。本文着重对露天煤矿巡检机器人进行设计,并对其进行现场测试。
1 巡检机器人的总体设计
本文以对露天煤矿带式输送机的监测为背景,为带式输送机的运行参数的监测设计巡检机器人,且着重对带式输送机驱动装置故障、输送带失效以及托辊故障等特征进行监测,对应的监测参数为皮带机的电机温度、转速、振动情况;输送带的转速、张力以及偏移角度等。
根据带式输送机的故障类型和巡检机器人的监测参数,可将巡检机器人分为驱动系统、控制系统和人机交互界面。为保证带式输送机的高效运输效果,对巡检机器人提出如下要求:
1)要求巡检机器人能够实现对长距离带式输送机参数的监测,且能够实时对皮带机运行参数进行采集;
2)要求巡检机器人体积适中,不能够影响皮带机的正常运行;
3)要求巡检机器人为电动驱动系统,具有较长的续航里程;
4)要求巡检机器人可搭载各种传感器对运行参数进行监测,并与上位机实现无线通讯,且具有实时显示皮带机运行参数和故障、报警类型的用户界面[2]。
根据巡检机器人的功能要求,设计巡检机器人的总体结构框图如图1所示。
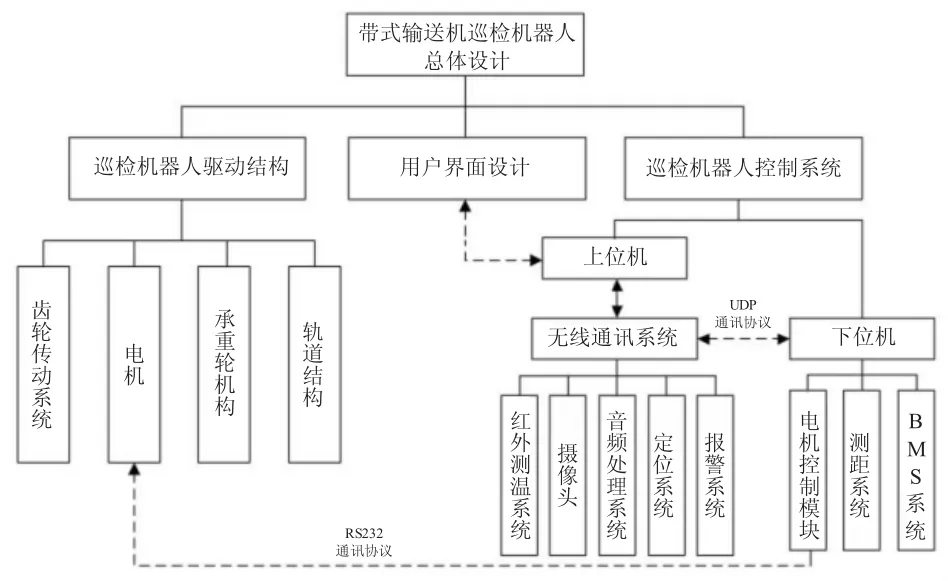
图1 巡检机器人总体设计框图
2 巡检机器人驱动系统的设计
目前,可应用于巡检机器人驱动的方式包括有轮式驱动结构、履带式驱动结构、悬线式驱动结构以及轨道式驱动结构。鉴于露天煤矿带式输送机所需巡检的距离较长、巡检目标相对单一且巡检路线固定。本文采用轨道式驱动结构实现对巡检机器人的驱动控制,具体可通过钢丝绳拖拽驱动和齿轮齿条驱动方式。
其中,钢丝绳拖拽驱动结构具有控制简单、维修方便的优势,但鉴于露天煤矿温差较大在寒冷季节容易出现结冰和积水情况影响巡检机器人的驱动,且钢丝绳拖拽方式不适用于长距离路线的铺设。自驱动式齿条齿轮驱动方式具有可靠性高、环境适应性好、结构紧凑等优势。因此,选择自驱动式齿轮齿条驱动方式实现对巡检机器人的驱动控制[3]。此外,对于自驱动式齿轮齿条的驱动方式可将齿条安装于侧面或底部,而将齿条安装于侧面的稳定性较差且装配工艺较差,齿条安装于底部对系统的装配要求高。
综上所述,选择将齿条安装于底部的自驱动式齿条齿轮的驱动系统。结合露天煤矿工作面的实际情况,设定巡检机器人的最大巡检速度为0.5 m/s。结合带式输送机的坡度和长度,要求巡检机器人的续航时间不得少于6 h,续航里程不得少于200 m。
根据巡检机器人的整机质量为25 kg,带式输送机最大倾角α为11°,则巡检机器人电源所输出的最小扭矩如式(1)所示:

式中:FG为巡检机器人的重力,取250 N;m为齿轮齿条的模数,取2.5;Z为齿轮的齿数,取23;η为驱动系统的总效率,取0.90。
经计算可得,巡检机器人的电机的最小扭矩为1.92 N·m。根据上述计算结果,为巡检机器人驱动系统配置驱动电机,其类型为Maxon EC直流电机,型号为Maxon-4,该型号电机所能提供的最小扭矩为4 N·m。
3 巡检机器人控制系统的设计
控制系统为巡检机器人的核心系统,基于控制系统能够实现系统内各个模块之间的数据通讯,通过所采集到的数据推断出带式输送机的工作状态,并对异常现场发出报警。结合巡检机器人的功能要求,为其设计如图2所示的控制系统结构框图。
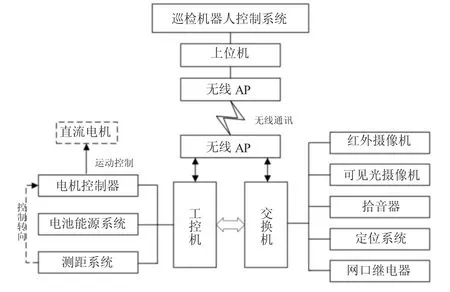
图2 巡检机器人控制系统结构框图
如图2所示,巡检机器人控制系统主要由控制系统、数据采集系统、通讯系统和电池供电系统组成[4]。结合工控行业中的选型经验为巡检机器人控制系统的硬件选型结果如表1所示。
4 巡检机器人的现场测试
根据上述配置完成巡检机器人控制系统和驱动系统设计后,为保证其在实际应用中的稳定性和高效性,设计一款巡检机器人的样机对其应用情况进行测试分析,主要包括有巡检机器人的爬坡性能和续航能力进行现场测试。
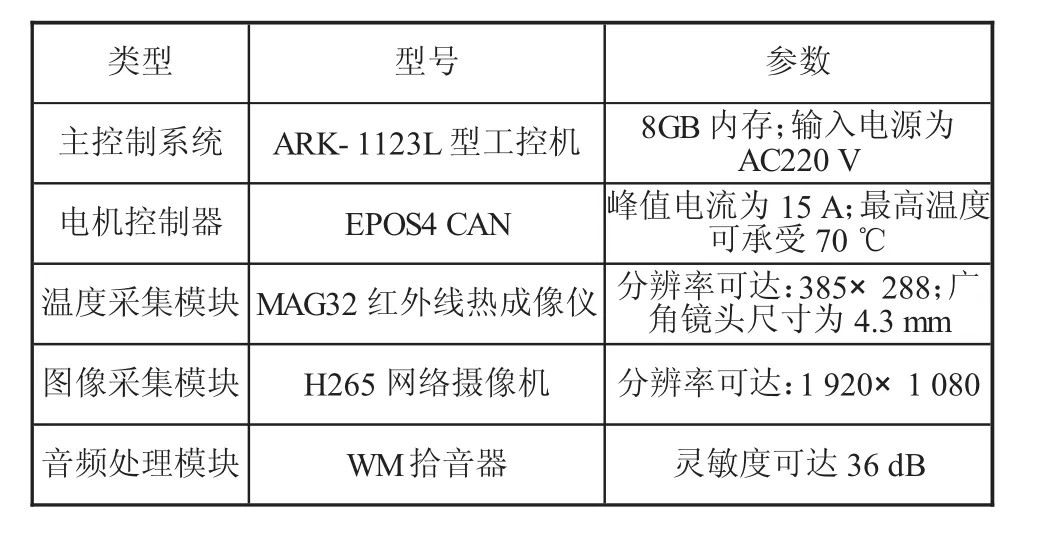
表1 巡检机器人控制系统硬件选型结果
4.1 巡检机器人爬坡性能测试
根据露天煤矿带式输送机的使用情况,模拟巡检机器人所监测带式输送机的坡度为20°,巡检长度为9 m,现场环境的温度为20~37℃。实践表明,巡检机器人可在不同电机转速下实现平稳爬坡,且爬坡过程中未出现卡顿的现象[5]。此外,经现场测量不同电机转速下巡检机器人的爬坡速度与理论速度的差值仅为6%。
4.2 巡检机器人的续航测试
为充分验证巡检机器人的续航能力,在不同环境温度下测试巡检机器人的续航时间,测试结果如图3所示。
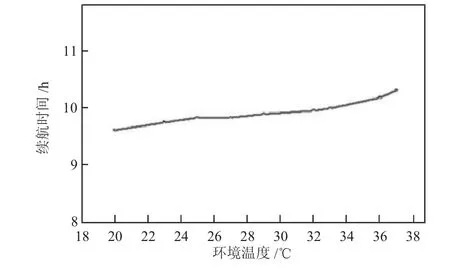
图3 续航测试结果
如图3所示,巡检机器人随着环境温度的升高,其续航能力提升,且巡检机器人的平均巡航时间为10 h,满足续航时间不少于6 h的要求。
4 结论
1)采用齿条安装于底部的自驱动齿轮齿条的驱动方式,且采用直流电机驱动,并根据巡检机器人的工作环境为其配置扭矩不小于1.92 N·m的电机;
2)根据巡检机器人的功能要求,为其主控制系统完成工控机、电机控制器、温度采集模块、图像采集模块的选型;
3)经对巡检机器人现场测试可得,其在坡度为20°的工况下工作,其实际巡检速度与理论巡检速度的差值仅为6%;在20~37℃环境中的平均续航时间为10 h,满足续航时间不少于6 h的要求。