基于组合定位技术的采煤机姿态监测系统研究
2020-10-18张俊青
张俊青
(宁武县中小企业服务中心, 山西 宁武 036700)
引言
作为煤矿井下综采作业的核心设备,采煤机综采作业效率和自动化程度直接关系到综采面上综采作业的效率和经济性,采煤机截割作业时需要根据井下不同环境不断调整截割姿态,满足截割安全性的需求,因此对采煤机截割姿态的精确监测是实现采煤机自动截割作业的基础,传统的采煤机姿态监测方案主要采用捷联惯导定位技术,但该方案需要不断对定位精度进行修正,避免累积误差增多,而且只能对采煤机的姿态进行局部定位监测,无法实现绝对姿态位姿监测,难以满足井下采煤机、液压支架联动控制需求,因此本文提出一种基于组合定位技术的采煤机姿态监测系统。
1 组合定位方案
结合煤矿井下实际环境和对采煤机截割作业过程中的位姿监测需求,本文所提出的全站仪和无载波通信(UWB)组合定位方案整体结构如图1所示[1]。
在该组合定位方案中,对全站仪和无载波通信(UWB)设备的布置主要是依据井下地质环境和测量精确性的需求。在井下运输平巷内,能见度高、粉尘浓度低,但空间较为狭小,因此采用了全站仪定位方案来实现对无载波通信(UWB)固定基站的定位。在综采面上作业环境较为恶劣,能见度低,除了要满足定位精确性的需求外还需要满足随着采煤机移动方便、连续可靠的定位需求,因此采用了无载波通信(UWB)定位系统对各个定位节点进行定位。在采用该无载波通信(UWB)对采煤机截割作业姿态进行动态定位的过程中需要设置最少三组定位节点[2],以满足对采煤机运行过程中姿态角的结算需求,为了提升结算精度,在采煤机上同步设置了倾角传感器和寻北仪对采煤机运行时的姿态角进行测定,满足定位精确性的需求。
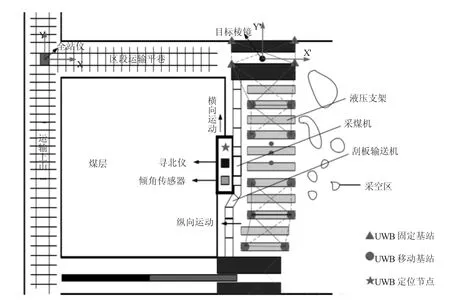
图1 煤矿井下组合定位技术方案示意图
2 采煤机位姿监测原理
在实际应用过程中采用无载波通信(UWB)技术来对基站群坐标系内各个定位节点的坐标位姿进行测定,然后利用全站仪对无载波通信(UWB)基站在系统内的绝对坐标位姿进行测定。采煤机在进行截割作业过程中机身位姿和摇臂倾角均会随着综采作业的进行而不断变化,然后利用倾角传感器来对采煤机工作过程中的俯仰角变化情况进行测定,辅以寻北仪即可测定采煤机运行过程中的姿态,其综合位姿监测原理如图2所示[3]。
由图2可知,在实际运行中采煤机的位置定位包括采煤机的姿态角和采煤机的空间坐标两个部分,采煤机姿态角的确定是通过设置在采煤机上的倾角传感器和寻北仪共同确定的,利用寻北仪来测量采煤机的陀螺角的速度变化情况来确定航向角。利用倾角传感器,通过机身工作时的振动情况来改变重力轴和灵敏轴之间的夹角,通过数据运算处理后,测出采煤机机身的横滚角和俯仰角,再结合对采煤机航向角的判断结果,最终可获取采煤机工作时的姿态角。采煤机工作时的空间坐标系则是先利用无载波通信(UWB)确定基站群的相对空间位置,然后利用全站仪对其在井下巷道内的绝对空间位置进行测定,从而满足在采煤机运行情况下对其控制位置的精确测定。
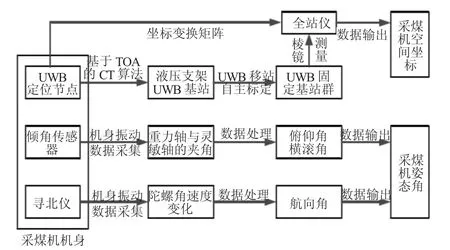
图2 采煤机位姿定位原理示意图
3 位姿检测系统设备布置
为了确保对采煤机位姿检测的精确性,在布置各类传感器设备时需要根据煤矿井下的地质环境和测量需求进行灵活的配置[4],从而确保测量精确性的需求,各监测设备的布置如图3所示。
由图3可知,无载波通信(UWB)定位系统的固定基站主要设置在平巷和综采面的交叉口的位置,为了满足对采煤机在移动状态下的可靠定位,在液压支架的顶部和底部分别设置有无载波通信(UWB)定位基站和定位节点。全站仪设置在运行平巷和运输上山的交叉口处,作为构建采煤机运行姿态监测的绝对位置坐标系。为了实现对采煤机运行过程中姿态角的可靠监测,寻北仪和倾角传感器均设置到采煤机的机身位置,为了确保测定结果的准确性,一般选择安装在采煤机摇臂下侧位置,满足测量精度和测量稳定性的需求。
为了对该组合式的采煤机姿态监测体系应用效果进行分析,以某型采煤机为研究对象,安装相应的设备后,对运行过程中的姿态情况进行监测,根据实际监测结果,采煤机在运行过程中的绝对定位精度小于±0.2 m,采煤机机身的俯仰角跟踪精度小于±0.12°,其航向角的跟踪定位精度小于±0.07°,完全满足煤矿井下自动截割控制时的定位精度需求,为实现井下的无人化综采作业奠定了基础。
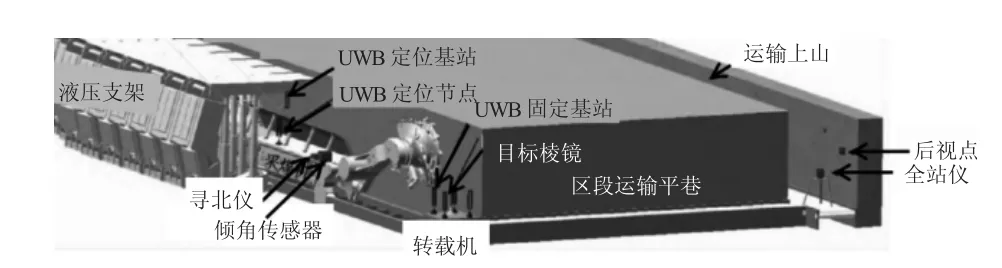
图3 采煤机位姿监测设备布置结构示意图
4 结论
1)该组合定位方案中,对全站仪和无载波通信(UWB)设备的布置主要是依据井下地质环境和测量精确性的需求,全站仪设置在运行平巷和运输上山的交叉口处,作为构建采煤机运行姿态监测的绝对位置坐标系,无载波通信(UWB)定位系统的固定基站主要设置在平巷和综采面的交叉口的位置。
2)采煤机的位置定位包括采煤机的姿态角和采煤机的空间坐标两个部分,采煤机姿态角的确定是通过设置在采煤机上的倾角传感器和寻北仪共同确定的,绝对空间位置是通过全站仪进行测定的,从而满足在采煤机运行情况下的精确定位需求。
3)采煤机在运行过程中的绝对定位精度小于±0.2m,采煤机机身的俯仰角跟踪精度小于±0.12°,其航向角的跟踪定位精度小于±0.07°,完全满足煤矿井下自动截割控制时的定位精度需求。