数字传媒交互式技术在采摘机器人远程控制中的应用
2020-10-17郎永祥
郎永祥
(重庆城市管理职业学院,重庆 401331)
0 引言
在果蔬生产作业过程中,果蔬的采摘是最耗时耗资的一个环节,其作业强大,费用高,而且作业时间密集,采摘成本要占总成本的50%~70%。为了降低劳动强度,节省生产成本,将采摘机器人引入到采收过程中,以提高果蔬的作业生产效率。在采摘机器人使用过程中,采摘机器人的作业质量非常重要,特别是对于一些易损的果蔬,如果采摘质量不高,会严重影响采摘效果。因此,在采摘机器人作业过程中需要引入监测系统和远程控制系统,当出现采摘质量不好的情况时,可以通过远程控制来调整机器人的作业姿态,以提高作业质量。
1 基于交互式学习的采摘机器人远程动作控制
采摘机器人虽然已经被应用到了果蔬采摘过程中,但仍然存在很多问题,特别是作业质量的监测。在一些易破损果蔬的采摘过程中,如果采摘作业质量存在问题将会造成很大的果实采摘损伤。因此,在采摘机器人作业过程中,采摘机器人作业质量的监测非常重要,如果在发现作业质量存在问题时及时给予干预,将在很大程度上避免果实的损伤。根据此原理,基于交互式学习原理,引入了采摘机器人远程动作控制系统,其流程如图1所示。
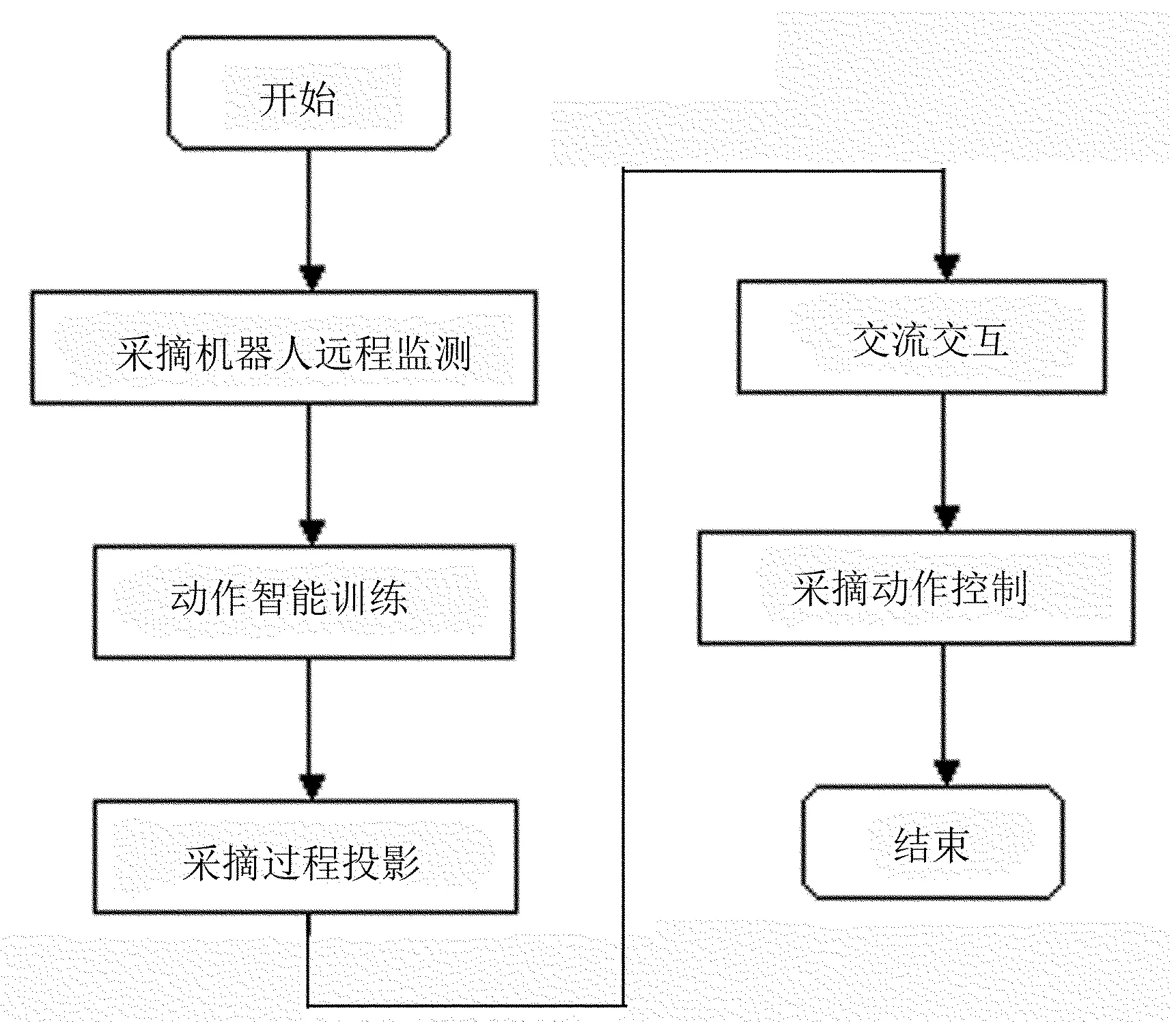
图1 基于交互式学习的采摘机器人远程控制流程
基于交互式学习的采摘机器人远程动作控制的流程主要分为4个步骤:首先是对采摘机器人远程的作业过程视频进行采集,视频采集完成后利用投影技术进行3D投影,以了解采摘机器人动作的实时情况;然后,利用交流交互技术对采摘机器人之前学习训练的动作进行较为准确的控制;控制过程采用远程控制的方式,可以发送语音指令等,实现机器人和管理员的交流交互。
2 采摘机器人远程控制设计
随着智能化时代的到来,在采摘机器人作业过程中,实时监测机器人并与机器人进行交流交互成为可能。为了实现采摘机器人的远程交流交互和控制,需要设计多媒体系统,通过多媒体系统管理员可以采用语音或者动作感知等方法对采摘机器人的行为进行远程控制,采摘机器人远程的作业情况也可以实时的反馈给管理员端。系统的总体框架如图2所示。

图2 采摘机器人交互式控制系统框架
采摘机器人交互性控制系统最重要部分是基于多媒体的计算机控制系统,该系统可以发布和接受控制指令、播放视频和音频等信息、处理通信数据等,从而实现信号转换和各种音视频设备的控制。控制面板是人机对话的重要工具,可以通过各种按钮实现对计算机设备、投影设备、话筒设备的控制和操作,使繁琐的控制变得更加简单化。
实物投影设备也是实现采摘机器人和管理员交互式人机对话的重要设备,它可以将采集得到的采摘机器人作业信息情况以三维的形式进行投影,更加生动形象地展示采摘机器人的作业过程,如图3所示。管理人员根据采摘机器人的详细作业情况对其做出相应的调整,调整过程可以采用语音或者手势感应的方式。采摘机器人在远程端做出相应调整后,可以改善采摘作业的质量。

图3 多媒体投影仪
多媒体投影仪是实时交互的重要设备,是采摘机器人和管理人员进行交流交互的重要媒介。在传送语音指令时,为了使采摘机器人具有较好的语音识别能力,可以采用语音拾取装置,如话筒等。管理员在和采摘机器人进行交流交互时,还可以采用电子白板的形式,通过电磁感应实现无纸化交流交互,在写入指令后可以直接输送到计算机中。为了更好地控制采摘机器人,使采摘机器人具有较高的控制精度,还可以采用智能化技术对采摘机器人进行训练学习。
在采摘机器人智能学习上,神经网络算法是最常用的学习算法。如果将小波算法引入到神经网络上,可以进一步的提高学习能力,对控制误差进行优化。假设基本的小波函数为x(t),将其平移b后,把预测信号和a做内积,其表达式为
(1)
其中,h为卷积函数。
等效时域的表达式为
(2)
小波算法利用反向传播的反馈性能,可以有效地提高计算误差。假设动作控制训练的输入部分为x1、x2、...、xk,小波神经网络输出匹配为y1、y2、...、yk,为了得到满意的期望输出,可以利用小波函数对权值ωk进行修正,其表达式为
y(k)=∑ωkx(k)
(3)
小波神经网络的预测误差为
e=∑yn(k)-y(k)
(4)
根据预测误差,对小波基函数系数和神经网络权值进行修正,其表达式为
(5)

(6)
其中,η表示学习效率。
在采摘机器人采摘过程中,动作的决策和规划还需要依据果实的位置。假设果实的位置坐标点为(x′,y′),在全局坐标系的坐标为(x0,y0),夹角为θ,利用三角变换可得
(7)
果实位置点在绝对坐标系中的坐标值为
(8)
(9)
假设采摘机器人左右轮角速度分别为wl、wr,则其速度分别为
(10)
(11)
其中,R为驱动轮的半径,D为两轮间的距离。
假设两轮的转速比为kp,则
(12)
调整kp的值,假设在第k个采样周期内其计算脉冲分别为mk和nk,则采摘机器人的基本控制模型为
(13)
其中,xk+1、yk+1、θk+1分别为第k+1个周期时机器人的位移和方向,Mp为机器人驱动轮转动1圈时的脉冲数,Δt为采样时间。
采摘机器人智能化动作训练完成后,在采摘作业过程中,利用多媒体交互式学习技术,管理员根据采摘机器人的实时作业情况对采摘机器人的动作做出指导,实现采摘机器人和管理员的双向交互过程。
3 采摘机器人远程控制系统测试
目前,对于采摘机器人采摘过程的监控一般都是单向的,主要是管理员通过远程监控视频对采摘机器人的作业质量和作业效率进行实时监控。在遇到突发状况时,管理人员根据现在作业情况,对采摘机器人进行干预,以避免事故的发生。目前,在采摘机器人实时控制方面的研究成果还比较少,是由于缺乏有效的实时交互学习系统。为此,将采摘机器人的远程监测和交流交互技术相结合,设计了采摘机器人远程监测系统,如图4所示。

图4 基于交流交互的远程控制系统架构
为了实现采摘机器人和管理员的交流交互,可以利用投影仪将远程监测得到的采摘机器人进行3D再现,然后管理员根据采摘机器人的实际作业情况对其动作进行指导和纠正。采摘机器人的动作干预可以通过远程发送指令来完成(如采用语音指令),采摘机器人端收到语音指令后将做出相应的动作响应。
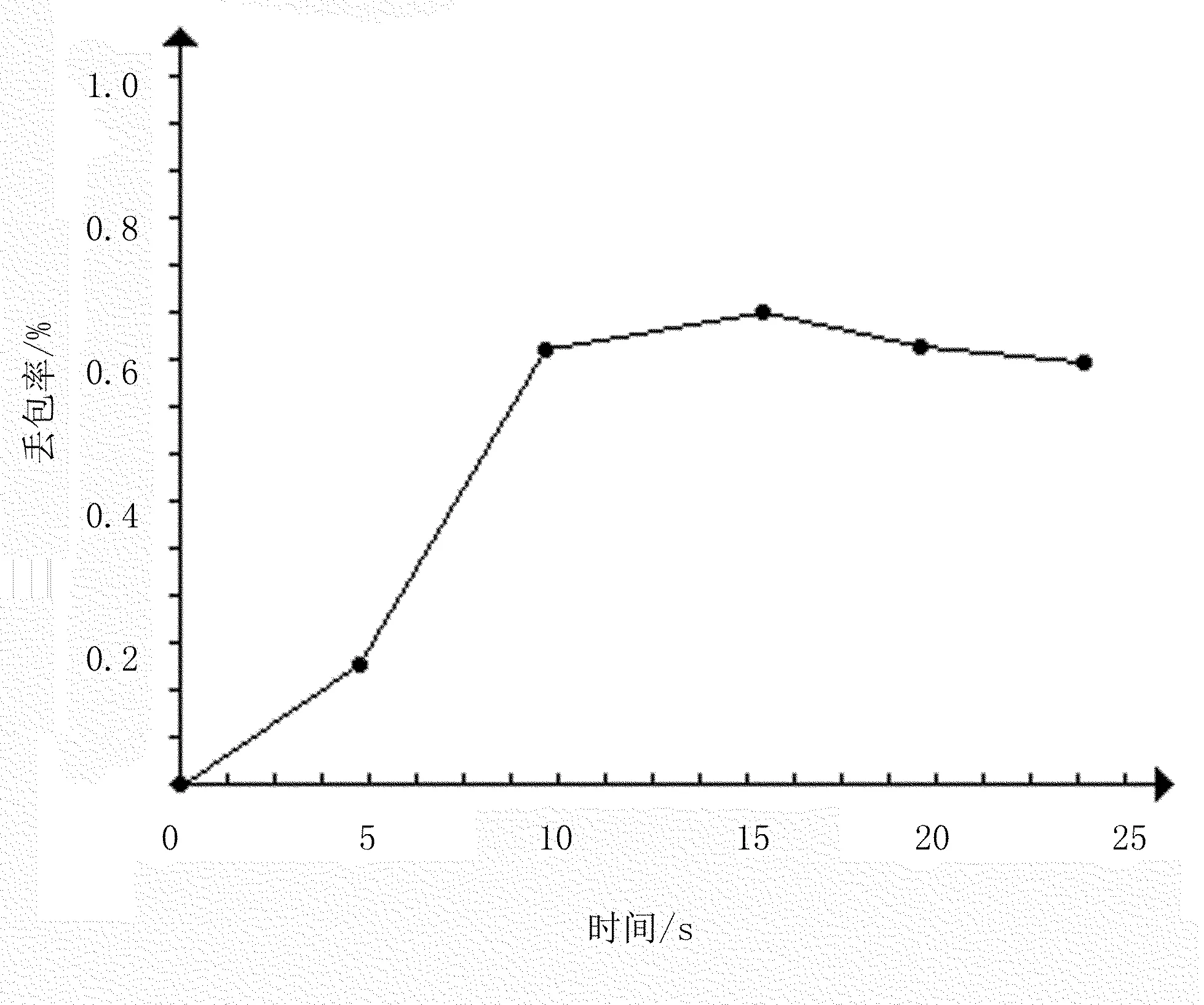
图5 通信过程丢包率监测
在采摘机器人远程控制过程中,对于指令的接收是非常重要的,需要有高质量的远程通信。为了保证通信质量,首先对通信的丢包率问题进行监测,结果如图5所示。由图5可以看出:远程通信的丢包率较低,能够可靠地完成通信任务。

图6 远程控制准确率对比
为了验证采摘机器人远程控制系统的可靠性,将基于交互式技术的控制系统和没有采用交互式技术的系统进行了对比,结果如图6所示。由图6可以看出:采用交互式技术可以有效地提高采摘机器人控制系统的控制精度。
4 结论
为了提高采摘机器人的智能化水平,提高远程控制精度,基于数字传媒交互技术,在采摘机器人远程控制系统的设计上引入了交互性系统,通过远程监测、三维实体投影和语音指令控制的方式,实现管理员和采摘机器人的交流交互,从而提高了采摘机器人的智能化水平。为了验证方案的可行性,对远程控制系统的性能进了测试,并将测试数据和没有采用交互技术的系统进行了对比,结果表明:采用交互性系统可以有效地提高控制系统的精度,对于采摘机器人现代化控制系统的设计具有重要的意义。
