全回转电力推进科考船航向稳定性分析
2020-10-17张士中张志平王玉成
张士中,张志平,陈 锐,王玉成
(1. 自然资源部第一海洋研究所,山东青岛 266061;2. 中国舰船研究设计中心,武汉 430064)
0 引言
目标船是一条2000 吨级的无限航区综合科学考察船,总长86.4 m,垂线间长77.8 m,型宽12.5 m,型深6.4 m,吃水4.3 m,总吨2 184 t,采用全电力系统双舵桨推进器方式推进。在船舶海试的航向稳定性试验中发现:顺水180 s 艏向角偏转232°(航速约15.4 kn),逆水180 s 艏向角偏转273°(航速约14.3 kn)。试航结果表明,目标船在舵角0 位不变且不干预的前提下航向稳定性直航偏转角度明显超过同类船舶,这对船舶操纵性带来不利影响。
1 偏航原因分析
航向偏离是由于力的不平衡导致的。从偏航实际情况来看,初始的状态相对稳定,此后偏航的角速度开始迅速加大。风流影响将对目标船产生更大的偏航力,此时偏航已难以逆转。因此,问题的关键是分析在此过程中起到决定性作用的不平衡扰动力。解决问题的关键是采取相应措施减小不平衡扰动力的影响,避免船舶进入回转状态
船体除受到风、浪、流等外界不平衡力因素外,船舶自身可能产生的不平衡力主要来自于船型、舵角精度和舵桨推力不平衡等几个方面,下面逐一进行分析。

表1 稳定性偏转与回转速度对比
1.1 船型影响产生的不平衡力
本船船型瘦长,长宽比大、方形系数小,且在尾部设有呆木。通常这类船型具有较好的航向稳定性条件,在高航速状态稳定性会更好。船体自身受到涡流的影响会产生不平衡力。这种涡流通常在水流通过桥墩、海洋平台的支柱等类似圆形或方形截面的结构物附近时较为显著,而在通过流线型物体时产生的涡流较小。采用Fine Marine 软件对本船的涡流影响进行了仿真分析,仿真计算模型如图1 所示。
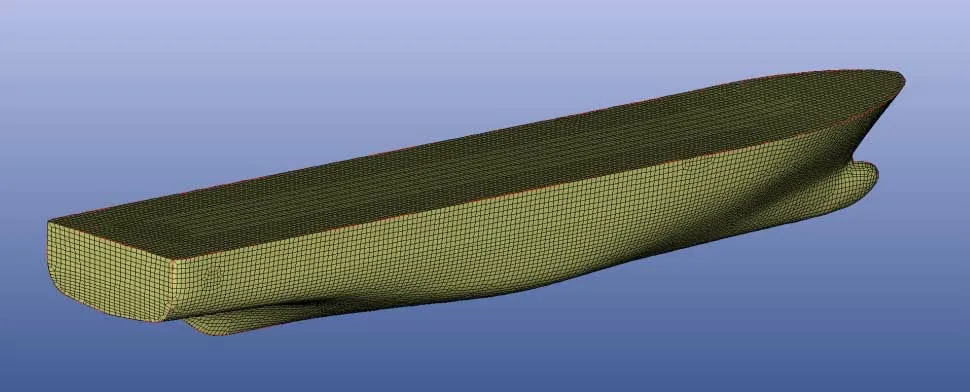
图1 涡流仿真计算模型
涡流引起的偏航力矩计算结果如图2 所示。从图中可以看出因为涡流的存在产生了一个变化的偏航力矩。因涡流产生的偏航力矩约11.76 kN∙m,这个力矩相当于在船尾作用30 kg 的舵力。这样的偏航力矩不足以使船舶发生快速偏航,表明船体本身的航向稳定性是良好的。
1.2 舵角的误差产生的不平衡力
舵桨装置本身特点决定其无法保证舵角回到绝对“0 位”的精度,根据厂家对于舵桨角度的工艺精度要求,“0 位”误差(控制命令死区)为0.3°,操舵误差(从命令给定到反馈显示)为1°。考虑舵桨精度误差的现实条件,较为极端的情况是双舵桨同方向误差1°舵角,如图2 和图3 所示。产生的偏转力矩计算如下。
舵桨偏离1°产生的横向舵力为

双舵桨同向偏离1°产生的回转力矩为

式中:T 为桨的推力,kN∙m;α 为舵桨偏离的角度,(°);L1为舵桨作用点到船舶中心点的距离,m。
1.3 舵桨推力不平衡的影响
因左右桨的功率差异也将导致产生回转力矩,实际试航时发现两桨同转速下功率相差7%~10%。按推力相差10%估算这时产生的回转力矩为

1.4 其他外界因素的干扰影响
试验应在风力不大于3 级,海况不大于2 级,潮流平缓的情况进行。试验中出现正在偏转的船在风浪的作用下顶住航向停止偏转。说明外界的干扰力应该也大到足以使船发生航向的快速偏转。然而 外界因素的影响十分复杂,难以进行量化评估。只能使试验尽可能在标准海况下进行,以降低外界因素的干扰影响。

图2 船型偏航力矩计算结果

图3 舵角偏离产生的力矩影响
1.5 小结
将船型、舵角误差、舵桨推力不平衡等因素可能产生的偏航力计算结果对比如表2 所示。

表2 各种因素产生的偏航力对比
从以上对比结果可以看出,各种因素可能产生的偏航力矩大小关系为:舵角误差>>舵桨推力不平衡>船型。因此航向偏离的原因主要来自于舵角误差产生的舵力,其他因素的影响均起到次要作用。
2 改善航向稳定性的措施论证
2.1 校准舵桨“0 位”
从航行试验的现象分析,舵桨的电气“0 位”与实际“0 位”不完全一致,分析如下:
1)调整舵角前船舶向右偏航,调整舵角后船舶向左偏航。
2)调整舵角后,验证通过压单个舵桨舵角−3°~−5°才能避免向左偏航。
3)进坞时,操纵杆电气“0 位”与舵桨机械“0位”误差3.5°。
校准舵桨“0 位”的方法有:
1)通过“0 位”指示灯核对
舵桨“0 位”指示灯精度为“±0.3°”,通过调整厂家认为已经达到此精度。由于舵桨自身没有指示实际角度的机械指针,因此无法通过其自身验证。
2)采用航行试验验证
通过螺线试验、双舵桨航向稳定性试验、单舵航向稳定性试验验证可以证实舵角“0 位”是否准确,再通过八字舵角航向稳定性试验找到水动力“0位”后,可以进一步改善航向稳定性。但试验条件和过程要求高,恐难以通过试验验证“0 位”并准确找到水动力“0 位”。
3)进坞检查舵角
进坞检查舵角的实际误差是最为直观的办法。结合进坞对舵桨的舵角误差进行检查确认,是最为简便可行的方案。保证舵角“0”位的误差在厂家工艺要求的±0.3°范围内,是后续实施改善航向稳定性工作的基础。
2.2 增加稳定鳍
从全回转舵桨本身的特性来看,由于其推力方向可以360°旋转,因此该型船相比常规船舶具有更好的机动性和操纵性,在获得良好的机动性同时,其航向稳定性会受到一定的影响,这是由回转的控制误差引起的,属于全回转舵桨的固有特性。
要降低全回转舵桨回转控制精度对航向稳定性带来的不利影响,需要采用一些其它措施提高航向的稳定性。以往的实例证明了鳍的作用不单是增稳且能改善运动品质[1]。
操纵性控制方程见式(1)。

式中:r 为回转角速度,rad/s;δ 为舵角,(°);K 为回转性指数,K 越大表明回转性越好;T 为应舵指数,T 越小表示船舶的稳定性和跟从性越好。K 和T的具体表达式如下所示。

式中:M 为舵产生的转首力矩系数;N 为船舶回转中的阻尼力矩系数;I 为船舶回转中的惯性力矩系数。
分析以上操纵性方程和操纵性指数,可以得到:
1)改变N 值可以同时影响操纵性指数K 值和T 值。比如增加回转阻尼可以使N 值增加,进而使T 减小即稳定性变好,但同时这也会使K 减小即回转性变差。即无法通过改变N 值同时提升回转性和稳定性。
2)增加舵面积可以同时增加M 和N 值,但是M 增加快于N 的增加,因此回转性和稳定性可以同时得到改善。
船舶航行过程中舵的作用至关重要,除了能保证最基本的航向稳定性和操纵性外,还可以在船舶快速性和经济性方面进行优化[2]。ABB 的Azipod、川崎重工的PODPELLER和法国的DCN PODSTER都选择在全回转舵桨底部增加了垂向稳定鳍装置。稳定鳍可以抵消部分横向力,改善航向稳定性,同时还能改善螺旋桨后部的流场。典型的稳定鳍的型式如图4 所示。
“考古01”号采用了肖特尔的双桨式舵桨系统,在吊舱外面左右两侧有尾翼状的翼片,可以起到改善螺旋桨尾部流场的作用(图5)。川崎重工的PODPELLER 推进装置同时具有横向和垂向的尾鳍,这可以消除侧向力并改善螺旋桨尾部流场。目标船采用的舵桨推进装置,没有安装可改善航向稳定性和螺旋桨尾部流场的尾鳍装置,因此其自身可能产生的横向力无法通过自身加以消除(图6)。
在此情况下,可以考虑在船尾底部增加稳定鳍的方案来改善航向稳定性。在综合考虑双侧舵角同向偏差1°和桨的负荷相差10%产生的影响,产生的回转力矩为:船型误差产生的偏航力和舵角误差产 生的偏航力之和146.26 kN∙m。
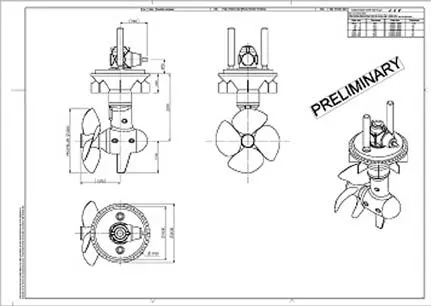
4 全回转推进装置的稳定鳍

图5 考古01 的稳定鳍

图6 目标船的全回转推进装置
在尾部增加稳定鳍的方案,鳍的面积约6 m2。经计算其攻角1°产生的升力为493 kg。可产生的平衡力矩为:178.8 kN∙m。
计算表明,稳定鳍产生的升力与舵角偏差1°和桨的负荷相差10%产生的偏航力矩相当。因此航向稳定性得到有效的改善应该是可期的。
稳定鳍的安装位置示意图见图7。
增加稳定鳍的方案优缺点分析如下:

图7 稳定鳍位置示意图

图8 稳定鳍采用流线型剖面
1)稳定鳍位于中线面位置并采用流线型,同样面积的情况下正常航行时产生的阻力较小,在航向偏离时产生的稳定力矩较大。该方案使用较小的代价带来更好的改善效果,是一个较优的方案。
2)稳定鳍安装位置避开了尾部的压载水舱,施工不会破坏压载舱涂层。也尽可能避开了原来的呆木位置,尾部较为平坦的底面容易保证施工工艺要求。
3)稳定鳍安装后可能导致船舶挂渔网。
增加稳定鳍后对其他总体性能参数造成的影响包括:
1)增加稳定鳍后,阻力增加,初步估算航速将降低0.3 kn。
2)增加稳定鳍后,阻尼增大,全速回转时的稳定航速降低,最大横倾角将减小。Z 形操舵时船舶横倾较大的情况也可得到改善。
3)由于目标船在中国沿海作业任务较多,挂渔网为大概率事件,因此对此方案持谨慎态度。
2.3 增加附加附体
在采用在尾部增加附体的方案时,考虑在尾部附加附体的面积为6 m2~8 m2。尾部增加附加附体后面积与同类型船的情况对比如表3 所示。

表3 增加附体面积与同类型船对比
附加附体的位置示意如图9 所示。

图9 附加附体位置示意图
增加附加附体后对其他总体性能参数造成的影响包括:
1)增加附体后,阻力增加,初步估算航速将降低0.3 kn~0.5 kn。
2)增加附体后,横向阻尼增大,全速回转时的稳定航速将降低,最大横倾角将减小。Z 形操舵时船舶横倾较大的情况也可得到改善。
所增加附体在保证同样面积的情况下,考虑了2 种不同的结构形式。
方案一:下窄上宽的附加附体
具体结构型式见下图。其中底部宽度为200 mm,顶部最宽处600 m m。这种结构型式主要目的和优点是:
1)附体根部较宽,受力情况较好。
2)附体焊接的焊缝面积更大。
此方案的不足之处在于:
1)此处原设计有呆木线型,会导致局部尖狭处施工不便(图10)。
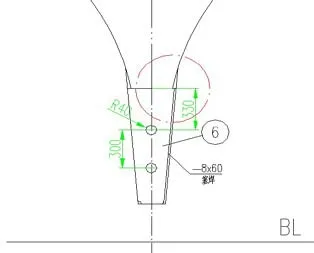
图10 局部尖狭不便施工
2)此处平板龙骨原设计底部无板缝,实际施工时因考虑到底部折角角度较大两侧折角均改为焊接板。从工艺要求来说在板缝处再次施焊不利于保证施工工艺。
方案二:等宽的附加附体
考虑到方案一在施工工艺方面存在的困难,提出了上下等宽的施工方案。整个附体的宽度为200 mm。避开现有的板缝至少50 mm。这种型式的优点是可以解决方案一的施工工艺问题,缺点是受到宽度限制后附体与船体之间的焊缝面积较小,为此我们对此方案的结构强度进行了重新校核。经过计算,本附加附体应力满足规范要求。
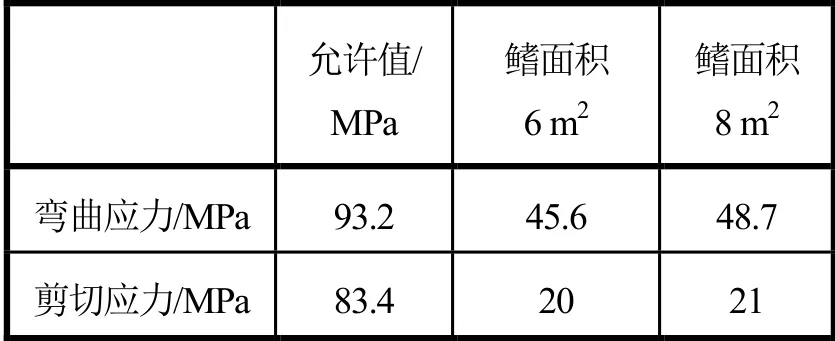
表4 增加附体应力计算结果
考虑到结构施工工艺问题,采用了方案二的上下等宽的结构型式。因结构宽度较小,经计算和CCS 认可尾部最多增加附加8 m2的附体,可使整个附体的面积达到同类型船7%~8%的水平,能够有效改善航向稳定性。
3 改善效果评估
3.1 仿真计算
仿真计算基于如下条件:
1)按1∶15 的比例建立船舶模型。
2)在静水条件下计算,不考虑风、浪、流等环境条件的影响。
3)舵桨0 位偏差为1°。
4)增加尾部附体的面积分别为4 m2、6 m2和8 m2。
船模的三维模型是采用Maxsurf 软件根据各个横剖面上的具体型值建模形成,并在三维软件Ranioceros 中将模型转换成Hexpress 能够读取的实体模型。考虑到在计算过程中的计算资源与船体尺度之间的矛盾,在建模过程中对船模进行15 倍的缩小。

图11 4 m2附加附体计算网格

图12 6 m2附加附体计算网格
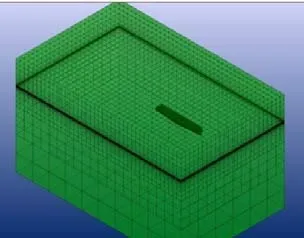
图13 8 m2附加附体计算网格
3.2 仿真计算结果
1)增加4 m2附加附体
假定船体始终受到146.26 kN∙m 的偏转力矩作用,在尾部增加4 m2附加附体的情况进行仿真计算。图14 显示的情况可以看出,增加4 m2附加附体无法平衡偏转力矩的作用,偏转角度将持续快速增大。
2)增加6 m2附加附体
假定船体始终受到146.26 kN∙m 的偏转力矩作用,在尾部增加6 m2附加附体的情况进行仿真计算。图15 显示的情况可以看出,增加6 m2附加附体基本可以平衡偏转力矩的作用,偏转角度在经历开始的快速增加后逐渐趋缓。增加此附体,在保持舵角不变的情况下,3分钟偏航角减少了30%~35%。
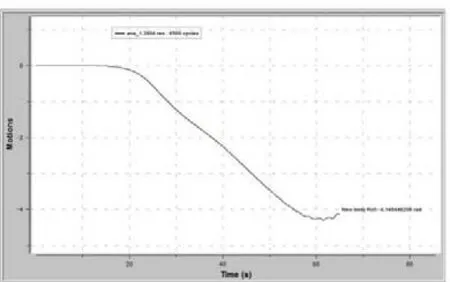
图14 4 m2附加附体计算结果

图16 8 m2附加附体计算结果
3)增加8 m2附加附体
假定船体始终受到146.26 kN∙m 的偏转力矩作用,在尾部增加8 m2附加附体的情况下进行仿真计算。从图16 显示的情况可以看出,增加8 m2附加附体可以平衡偏转力矩的作用,偏转角度在经历开始的快速增加后逐渐趋缓。增加此附体,在保持舵角不变的情况下,3 分钟偏航角减少了40%~45%。
4 改善措施实施及效果验证
4.1 改善措施实施
1)在坞内对舵桨机械“0 位”偏差进行了测量。测量结果表明,舵桨机械“0 位”误差为0.13°,在系统允许的误差范围内。
2)操纵系统厂家对电气“0 位”误差3.5°的情况进行了分析,并在坞内对电气“0 位”进行了校准。
3)安装附加附体。按照2.3 中的方案二在坞内完成了8 m2附加附体的安装。
4.2 改善效果验证
完成以上工作后,重新开展了航向稳定性试验。
1)试验条件
气象条件:风力3 级,海况2 级,潮流速度约2 kn,满足试验条件要求。
船舶装载:本次试验船舶实际首尾吃水分别为3.9 m 和4.2 m,横倾角0.1°。满足试验条件要求。
2)改善效果
在全速不操舵的情况下,3 分钟偏航角平均值从253°减小到138°,减小效果达到46%。在10 kn航速,不操舵的情况下,3 分钟偏航角为78.9°,达到同类船型的相当水平。由于目标船全速航行的时间较少,正常巡航航速约10 kn~12 kn,因此这一航速下的航向稳定性情况更有参考意义。
5 结论
随着人们对海洋资源的不断开发,海洋工程船舶的要求不断提高,大功率,使用高效率的全回转推进器已成为主流均势[3]。但CCS 和IMO 规范均没有对船舶航向稳定性和直航不操舵偏航角度的指标提出具体要求。1993 年IMO 提出船舶操纵性暂行衡准,并在1994年提出了相关指导性意见[4],2002年通过了《船舶操纵性标准》[5]分别对船舶操纵性衡准和指导性细则进行了修订。但IMO 条款只对回转、停船和Z 形试验等有要求,没有航向稳定性和直航不操舵偏航角度的指标要求。此外,IMO 的相关要求只适用于采用常规螺旋桨轴推进和有舵机的船舶,即化学品和天然气运输船(不限船长)和船长在100 m 以上的船舶,而不适用于目标船型。
针对目标船在试航中出现偏航角比同类船偏大的问题,文章对主推进系统的机械“0 位”和电气“0 位”不一致的情况进行了调整,并采用了增加附加附体的方案提高航向稳定性。
试航结果表明,目标船的航向稳定性达到同类船舶相当水平;保持直航的平均每分钟操舵次数由1.67 次减少到1.37 次。船舶在转弯的过程中,会产生较大的横摇,过大的横摇会降低船舶的安全性[6]。本次改善后,全速回转时最大横倾角从10°~11°减小到7°~8°,减小约30%,同时保证最大航速仍能满足不小于15 kn 的设计要求。因此,目标船的总体综合航行性能得到了改善,进一步保障了航行安全性。