基于区间动态划分的DP-TBD算法
2020-10-16孙藏安史小斌
孙藏安 孟 宁 史小斌
(西安电子工程研究所 西安 710100)
0 引言
复杂环境下多目标的检测与跟踪已成为现代雷达面临的问题之一。为了防止信号处理器的饱和,通常采用恒虚警率(CFAR)处理检测目标,但这样难以避免恒虚警损失,而在低信噪比和信杂比的情况下的弱目标无法检测出来[1]。检测前跟踪[2](track before detect,TBD)是一种针对低信噪比和低信杂比目标的检测跟踪新技术,在单帧内并不设检测门限[3],而是保留目标的原始信息,利用多帧能量的非相干积累,在多帧数据联合处理后,宣布检测结果并同时估计出目标航迹[4],适合于微弱目标的检测与跟踪[5]。TBD有动态规划[5-8](dynamic programming,DP),粒子滤波[9-10](particle filter,PF),有限统计学[11-12](finite set statistics,FISST),霍夫变换[13-14](Hough transform,HT)和最大似然估计[15](maximum likelihood,ML)等多种实现方法,但由于TBD保留了全部的原始数据(包括信号幅度),使得其很难应用于对实时性要求高的雷达系统。尤其在进行多目标跟踪时,多目标变量的高维特性使TBD的信号处理更加复杂,需要耗费巨大的计算资源。
本文基于标准单目标DP-TBD算法,研究运行高效的多目标DP-TBD算法。方法之一是利用两点起始的临时航迹和预测滑窗中的目标所在区域,动态划分分辨单元,然后执行标准DP-TBD算法。方法之二首先对量测区域采用基于密度的聚类(density-based spatial clustering of applications with noise,DBSCAN)方法进行聚类,然后对每一个聚类区域中的量测进行两点起始,再根据起始的临时目标状态和聚类区域对区间动态划分,最后对每一个临时航迹执行DP-TBD算法。执行标准DP-TBD的过程通过多拍累积滤除虚假航迹,保留真实航迹并输出。这两种方法统一称为区间动态划分的多目标DP-TBD算法。
1 系统模型
1.1 运动模型

xn,k+1=fn(xn,k,qn,k),n=1,2,…,Nk
(1)
其中qn,k为零均高斯白噪声。
1.2 量测模型

(2)

假设各帧之间、各分辨单元的观测噪声相互独立,由于传感器的模糊,会对邻近分辨单元造成影响。假设目标强度的分布按照点传播函数,如果各分辨单元的大小为Δx×Δy,则在分辨单元(m,n),位于(xk,yk),幅值为Ik的点目标强度可近似为
(3)
其中,b表示模糊点的数量,目标的信噪比可由式(4)计算
(4)

(5)
2 基于区间动态划分的DP-TBD算法
2.1 传统单目标DP-TBD算法

已知量测空间离散化的分辨单元为m=1,2,…,Nx,n=1,2,…,Ny,其中Nx、Ny为x、y方向上的分辨单元个数。
1)初始化。即k=1时,离散空间各分辨单元积累值函数
I(m,n)(s1)=z(m,n)
(6)
Φ(s1)=0
(7)
Φ(s1)=0可以理解为,因为此时是初始状态,没有前面时刻积累的先验信息,即初始化之前时刻的目标状态信息是未知的。
2)递归。即2≤k≤K时,
(8)
Φ(sk)=arg max(I(m,n)(sk-1))
(9)


图2 状态转移数在离散空间的分布
由arg max(I(m,n)(sk-1))可知,k时刻对应k-1时刻值函数的最大值,所以此时得出的是k-1时刻目标最可能所在分辨单元到k时刻该分辨单元的对应关系,因此可以求出k-1时刻到此分辨单元的目标状态sk-1。
3)终止。设定某一特定门限VT,寻找满足式(10)的候选目标状态。
(10)
(11)
2.2 基于两点起始和目标预测区域动态划分的多目标DP-TBD算法
DP-TBD将监测空间离散化为分辨单元为nx×ny的量测空间,而nx和ny值如何选取对TBD处理结果有很大影响。理论分析可知,若想有效地利用DP-TBD算法,需将同一目标不同时刻的量测点划分在不同的分辨单元中,因此不同的监测范围可能需要不同的分辨单元数,否则DP-TBD将无法适用,例如若nx×ny=50×50,当监视区域为x∈[0,50],y∈[0,50]时,图3(a)中目标可以将不同时刻的量测分辨出,但若监视区域为x∈[0,500],y∈[0,500]时,如图3(b)所示,若仍使用此分辨单元数,则将无法分辨出此目标。

图3 将监视区域划分为nx×ny个分辨单元
由以上分析可知,分辨单元个数与目标的运动情况有着密切联系,若想将不同时刻的目标分辨出来,需要使每个分辨单元的大小满足式(12)条件
(12)
其中vxmin、vymin为目标在x和y轴方向运动速度的最小值,T为采样周期。所以可得不同监视区域的最小分辨单元数为
(13)
所以当监视区域较大时,若想检测出慢速运动的微弱目标,需要建立足够多的分辨单元,就会造成很大的计算负担。
在未知目标速度先验信息的情况下,考虑采用简单的两点起始方法起始目标临时航迹,根据起始的每个临时航迹的状态信息分别对量测区间进行动态划分,然后执行标准单目标DP-TBD算法,若多拍累积后能量大于设定的阈值则判定此航迹为稳定航迹并输出,否则则认为此航迹为虚假航迹并舍弃,算法流程如图4所示。

图4 基于两点起始和分辨单元动态 划分的多目标DP-TBD算法
两点起始方法为:第一拍量测作为航迹头,利用最大速度限制一圆形区域Rthreshold=vmax×T,其中vmax为目标最大速度,T为采样周期。当第二拍量测落入以第一拍量测建立航迹头所在的区域内时,建立临时航迹,即若
(14)
其中,i,j为k时刻的第i个点迹和k+1时刻的第j个回波,则k时刻若建立Nk临时航迹,初始状态为
(15)

利用建立起的临时航迹对量测区间进行动态划分得到公式(16)。
(16)

图5 两点起始示意图
定义p为分辨区间系数,p值越小则分辨单元越小,分辨单元个数越多,则计算量越大,所以限制p∈[0.5,1]。

所以分辨单元个数
(17)

2.3 基于DBSCAN聚类和区间动态划分的多目标DP-TBD算法
传统DP-TBD算法的累积过程是基于分辨单元的,当搜索区域较大,分辨单元个数较多时,为了遍历整个空间,会造成严重的计算负担。虽然目标存在于量测区域全区域的任意位置,但某一时间段的某一个目标只存在于某个特定的区域之中,DP-TBD的处理方法是批处理,考虑可以对多批数据先进行聚类,然后对聚类得到的每一区域执行基于两点起始和分辨单元动态划分的DP-TBD算法,此时划分分辨单元的区域为每一个聚类区域,聚类过程也可以消除部分杂波。DBSCAN聚类的具体过程可以参照文献[16]。
算法过程如图6所示。

图6 基于DBSCAN聚类和区间动态划分的多目标DP-TBD算法流程
3 仿真分析
3.1 仿真场景设置
本文采用匀速直线模型对算法性能进行验证,采样周期T=1,目标运动拍数为k=10。其中,仿真场景有4个目标,目标初始状态如表1所示,可知仿真场景中设置了4个不同运动方向的目标,其中目标1、4为慢速目标,目标2、3为快速目标。量测区域为x∈[0,1000],y∈[0,1000],每拍设置在整个区间服从泊松分布的杂波数为C2=100,信杂比为SCR=10,方法1累积强度阈值VT1=70,因为方法2 DBSCAN聚类会滤除部分杂波,所以VT2=60。

表1 目标初始状态
3.2 仿真结果分析
因为仿真场景杂波较多,且量测区域较大,造成两点起始的虚假航迹较多,若不进行量测区间动态划分,仅仅根据临时航迹状态和全量测区域对分辨单元进行动态划分,则会造成巨大的运算负担,无法保证算法的实时性,不具备参考价值,故仅列举本文中提出的基于两点起始和目标预测区域动态划分的多目标DP-TBD算法(算法1)和基于DBSCAN聚类和区间动态划分的多目标DP-TBD算法(算法2)的结果,量测分区示意图如图7所示。

图7 量测区域分区示意图
对两种算法执行10次仿真,算法1仿真结果如表2所示,其中一次的跟踪结果及目标强度累积矩阵如图8,图9所示。
算法2仿真结果如表3所示,聚类参数Eps=30,MinPts=3。其中一次的聚类和跟踪结果及目标强度累积矩阵如图10,图11所示。

表2 算法1多次仿真结果

图8 算法1跟踪结果
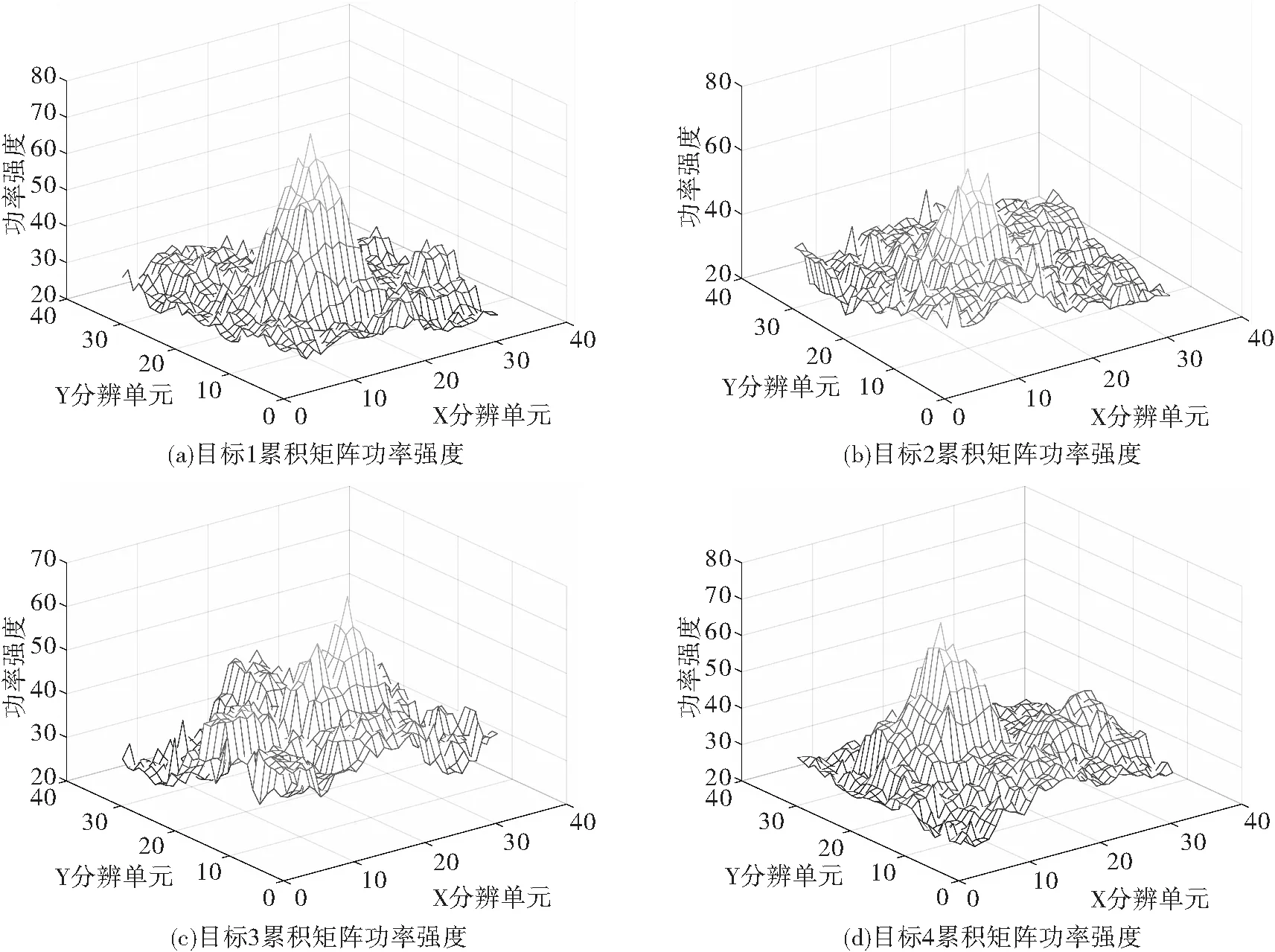
图9 算法1目标累积矩阵强度

表3 算法2多次仿真结果
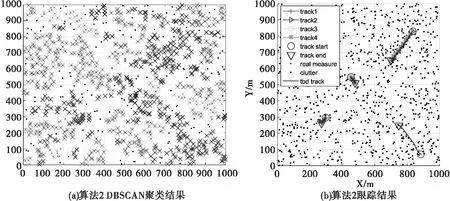
图10 算法2处理结果

图11 算法2目标累积矩阵强度
由表2、表3跟踪目标个数结果和图8、图10(b)算法跟踪结果可知,两种算法不仅能对目标2、3快速运动的目标形成稳定的跟踪航迹,还能够跟踪目标1、4这样慢速运动的目标,能够满足实际环境中跟踪不同运动状态目标的要求,具有较稳定的跟踪性能。
两种算法的对比结果如表4所示。

表4 两种算法结果对比
由表4可知,两种算法均有较高的计算效率,能够满足算法实时性的要求。每次仿真平均起始航迹数为31,大部分虚假航迹在DP-TBD多拍累积的过程中都能滤除掉。算法1的漏检率较高,而算法2的虚假航迹率较高,这主要是由于累积目标强度阈值的设置引起的,算法1设置了较高的阈值故导致了漏检率的增加,这需要根据实际应用中的经验进行赋值。同时,两种算法均能较好的完成对目标的有效跟踪。
实际环境中,杂波不是服从均匀分布的,而且存在同一时刻多个目标交叠于同一点的情况,个别目标也会伴随有较强的机动性,所以处理起来将会面临更多难题。本文旨在解决DP-TBD算法固定分辨单元难以对不同运动状态(速度)目标有效跟踪和分辨单元个数较多时计算量大的问题,针对具有不同运动模型(如加速、转弯等)的目标,后续可以考虑在对目标进行预测时采用交互式多模型的方法;针对交叠目标或相距较近的并行目标,因为其处于同一聚类区域或动态划分的同一区域中,可在目标累积过程中加入一定的逻辑策略,以最大期望输出真实目标。
4 结束语
本文提出的两种基于量测区间动态划分的多目标DP-TBD算法,具有较高的运算效率和跟踪性能。算法1根据临时航迹目标状态和滑窗窗长对量测区域进行划分及算法2根据聚类对量测区间进行划分的本质是一样的,都是将一个大的量测区域动态划分为一个个小的量测区域,然后根据临时目标状态动态划分分辨单元,最后通过DP-TBD算法累积滤除虚假航迹,输出稳定航迹,为TBD在工程实践中的应用提供了思路。