页岩气田压裂区加密调整井绕障轨道优化设计方法
2020-10-15高德利刁斌斌胡德高聂帅帅
顾 岳 高德利 杨 进 刁斌斌 胡德高 聂帅帅
1.石油工程教育部重点实验室·中国石油大学 2.中石化重庆涪陵页岩气勘探开发有限公司 3.承德石油高等专科学校
0 引言
页岩气丛式水平井组的产量进入递减期后,为实现页岩气田的长期稳产和产能接替,需要在原有布井的基础上部署加密调整井[1]。自2018年起,四川盆地涪陵页岩气田的开发已进入了调整阶段[2],通过对已有的丛式水平井组进行加密部署,发现已钻加密调整井受到了老井压裂裂缝的干扰,在钻井过程中发生井漏、气侵等复杂工况,并且受储层品质变差的影响,新井产量没有达到预期[2-3]。因此,在页岩气压裂区进行加密调整井的井眼轨道设计时,一方面必须考虑新井绕障防碰问题,另一方面还要减少或避免加密的新井压裂段影响域与老井压裂段影响域之间的相互干扰。
国内外相关学者已提出了二维以及三维绕障井眼轨道的设计模型[4-10],但在应用时都需要进行反复试算,设计过程较为繁琐:先在水平投影图上设计轨道,绕开障碍物,再在垂直投影图上进行设计,结合钻井工具的性能限制,反复校核设计参数的取值,以便最终确定所期望的井眼轨道。然而,从作业效率和成本方面来考虑,这样设计出的井眼轨道仍难以保证就是最优化的轨道。王志月等[11]通过矢量代数方法,将障碍物描述为空间圆柱体,建立了绕障井井眼轨道优化设计模型,但该模型只考虑了井眼轨迹误差不能直接应用于压裂区加密调整井的设计。
较之于常规的方法[4-11],在进行位于页岩气丛式水平井压裂区的绕障井眼轨道设计时,除了需要考虑井眼轨迹误差外,还需要考虑已钻井压裂裂缝的影响,以此来规避钻井事故的发生;同时,新井的压裂段影响域要避开老井的压裂段影响域,防止生产期间压裂段影响域相互干扰。前人的研究成果只考虑了井眼轨迹误差域[4-11],如果应用到页岩气压裂区的加密调整井井眼轨道设计时,会由于忽略压裂裂缝影响域的关系,导致新井受到老井压裂裂缝的干扰,产生钻井事故,并且影响老井产能[2-3]。目前,涪陵现场工程师将页岩气压裂区老井的压裂段影响域障碍物视为长轴半径80 m、短轴半径50 m的椭圆柱[3],来进行绕障轨道的设计,但是现场采用的绕障轨道设计方法仍为试算法。
笔者采用矢量代数方法,对页岩气压裂区障碍物进行了几何建模,障碍物综合考虑了压裂区已钻井的压裂段井眼轨迹误差域与压裂裂缝影响域;并通过计算障碍物轴线与设计点(起钻点与靶点)方向线之间的位置关系,确定绕障轨道的几何设计模型;所建立的页岩气压裂区加密井绕障井眼轨道设计模型,可以在满足防碰约束条件下得到总长度最短、井眼轨道势能最小的井眼设计轨道,而且避免了试算法的繁琐与不精确性;针对页岩气压裂区加密调整井与已钻井压裂段影响域可能出现的相互干扰问题,根据本文建立的考虑井眼轨迹误差和压裂影响域的压裂段障碍物几何模型,给出了判断不同压裂段影响域之间是否存在相互干扰的几何校核方法。该方法可以用于快速评估加密调整井压裂段井眼轨道设计方案的合理性。
1 障碍物描述
1.1 问题提出
在页岩气压裂区,设计井的压裂段影响域要避开已钻井的压裂段影响域,否则两口井的产能和井壁稳定性会受到影响[12]。如图1所示,Ⅰ井为已钻井,Ⅱ井为待钻井。如果Ⅱ井的压裂段影响域与Ⅰ井的压裂段影响域有重合,即图1中的dⅠⅡ小于a1+a2,需要重新设计Ⅱ井的压裂段井眼轨道与压裂相关参数。

图1 设计井与已钻井压裂段影响域防干扰校核标准示意图
1.2 压裂段的井眼轨迹误差域
井眼轨迹误差是绕障轨道设计的重要参考指标,国内外诸多学者对此进行研究。研究结果认为井眼轨迹误差来源于测量误差与计算井眼轨迹的数学模型误差,在量值上,测量误差占主导地位,轨迹计算模型误差可以忽略不计[13]。
根据井眼轨迹误差模型的计算结果,井眼轨迹每一个测点上的误差域皆为椭球形[13-15],在绕障轨道设计中,为了使设计结果更保守安全,计算过程更简便,常将椭球误差域简化为圆球域,将直井障碍物由直圆锥简化为直圆柱,定向井障碍物简化为空间圆环或斜圆柱[5,11]。在页岩气丛式水平井压裂区加密调整井设计中,障碍物为已钻井(或老井)的压裂段,如图1所示。
以压裂段上某个测点的误差椭球长轴半径Ra为半径,测点为球心做出一个圆球域,这个圆球域即压裂段该测点由于井眼轨迹误差而产生的障碍物。压裂段上不同测点的圆球域叠加,最终压裂段的井眼轨迹误差域为一个圆台,该圆台的底面半径随着井深的增加而增加。如图2所示,以丛式水平井平台中心O作为坐标原点,建立空间直角坐标系。压裂段的井眼轨迹误差域中心轴线起点为Mo(Xo,Yo,Zo);压裂段长度为L,m;圆台下底面的半径为r,m;上底面的半径为r*,m;圆台轴线单位方向向量to,to=(sinαocosφo, sinαosinφo, cosφo),φo和αo是Mo点的方位角和井斜角,(°);圆台底面a轴与b轴的单位方向向量分别为ta与tb,其中ta、tb与to两两正交,ta=(sinαacosφa, sinαasinφa, cosφa),tb=(sinαbcosφb,sinαbsinφb, cosφb),αa和φa分别是底面长轴a的井斜角和方位角,(°);αb和φb分别是底面短轴b的井斜角和方位角,(°)。
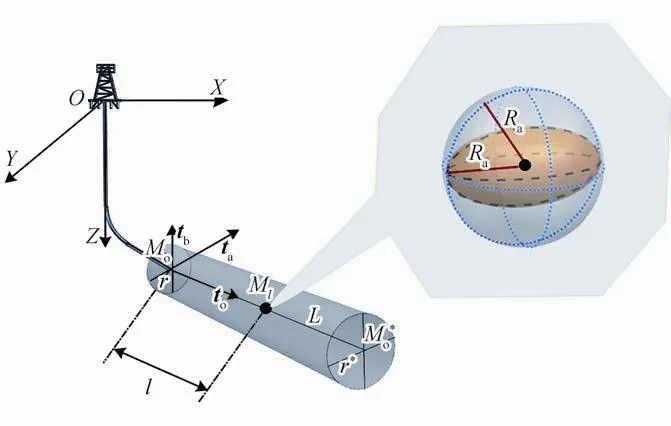
图2 压裂段的井眼轨迹误差域图
圆台障碍物轴线上的任意一点Ml的矢径r可以表示为:

式中ro表示Mo点的矢径,l表示圆台轴线上任意点相对于Mo点的轴线长度增量,m。
1.3 压裂段的压裂影响域
在页岩气丛式水平井压裂区加密调整井设计中,除了压裂段的井眼轨迹误差域需要考虑以外,压裂段的压裂裂缝影响域也需要考虑。设计井要避开已钻井压裂段的压裂影响域,防止老井压裂裂缝的干扰。
压裂段的压裂影响域沿轴心线的截面近似为椭圆形[2,16-21],涪陵页岩气田现场多采用椭圆柱状体来描述压裂段影响域[2],现场采用的椭圆柱状体模型长轴半径80 m,短轴半径50 m[3]。如图3所示,由压裂影响域产生的椭圆柱状体障碍物,可以由轴线起点Mli,轴线单位方向向量toi,底面椭圆长轴单位方向向量tA与短轴单位方向向量tB确定障碍物的空间位置,由椭圆长轴半径a和短轴半径b、障碍物轴线长度Li来确定障碍物大小。

图3 压裂段的压裂影响域示意图
1.4 井眼轨迹误差域与压裂影响域的耦合域
页岩气压裂区压裂段的井眼轨迹误差域形成的障碍物是圆台,由压裂裂缝影响形成的障碍物是椭圆柱,如图4-a所示,老井的测井数据得知后,圆台障碍物的位置和大小就可以确定,但是由于井眼轨迹的不确定性,压裂影响域所造成的椭圆柱障碍物的位置并不确定。椭圆柱障碍物的轴线起点在圆台障碍物下底面任意位置上,轴线终点在圆台障碍物上底面任意位置处。因此需要通过椭圆柱障碍物轴线的极限位置来确定耦合域的位置和大小。
如图4-b所示,沿着圆台障碍物轴线上任意点Ml做垂直于轴线的截面,圆台障碍物的截面形状为圆形,椭圆台障碍物的截面形状为椭圆,且椭圆圆心位于圆台障碍物截面任意位置处。椭圆圆心的极限位置在圆截面边上,椭圆圆心沿圆截面边绕一周,即可得到Ml点垂直于轴线的障碍物耦合域截面,如图4-b所示,耦合域截面形状近似为椭圆,由于Ml点是圆台障碍物轴线上的任意点。因此由井眼轨迹误差域和压裂影响域耦合成的障碍物的形状可近似为图4-a所示的灰色椭圆台。

图4 井眼轨迹误差域与压裂影响域的耦合域示意图
图4-c为耦合域椭圆台沿tb轴的半截面,截面中暗灰色部分为耦合域截面,棕黄色部分为压裂影响域截面。如图4-c所示,椭圆台下底面短半轴半径bo和上底面短半轴半径bo*的计算式为:
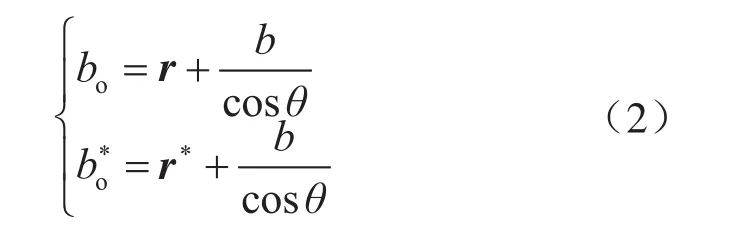
同理可得椭圆台下底面长半轴半径ao和上底面长半轴半径,即。
由上述分析可知,考虑了井眼轨迹误差与压裂影响域误差的已钻井压裂段障碍物,其形状可近似为椭圆台,可由圆台障碍物轴线起点Mo,轴线单位方向向量to,底面椭圆长轴单位方向向量ta与短轴单位方向向量tb确定障碍物的空间位置,由椭圆台下底面长半轴半径ao和短半轴半径bo,椭圆台上底面长半轴半径和短半轴半径,障碍物轴线长度L来确定障碍物大小。
2 绕障轨道优化设计
2.1 绕障轨道类型
要令设计井(Ⅱ井)轨道避开已钻井(Ⅰ井)的压裂段影响域,首先需要判断Ⅱ井起钻点方向线、靶点方向线与Ⅰ井之间的位置关系。①如Ⅱ井起钻点方向线,靶点方向线有且只有1条和Ⅰ井相交,则只需要设计2段扭方位段就可以满足安全绕障的需求,如图5-a所示;②如这两条方向线都和Ⅰ井相交,则需要3段扭方位段才能满足安全绕障的需求,如图5-b所示。
2.2 绕障轨道优化
Ⅱ井起钻点的空间坐标为(XA,YA,ZA),井斜角为αA、方位角为φA,单位方向向量tA=(sinαAcosφA,sinαAsinφA, cosαA)。首靶点T1的空间坐标为(XT,YT,ZT),井斜角为αT,方位角为φT,单位方向向量tT=(sinαTcosφT, sinαTsinφT, cosαT)。Ⅱ井起钻点方向线方程、靶点方向线方程和Ⅰ井轴线方程可以分别表示为:

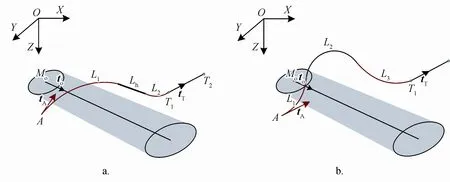
图5 绕障井眼轨道分类示意图

根据点向式直线方程位置关系判别式(6)、(7),来判断Ⅱ井起钻点方向线、靶点方向线是否与Ⅰ井轴线共面相交。如果只有1条方向线与Ⅰ井轴线共面相交,绕障轨道采取图5-a的设计:扭方位段+稳斜段+扭方位段;如果两条方向线都和Ⅰ井轴线共面相交,绕障轨道采取图5-b的设计:扭方位段+空间圆弧段+扭方位段。

式(6)和(7)中,如判断起钻点方向线和Ⅰ井轴线的位置关系,则(x,y,z,α,φ)取值为(XA,YA,ZA,αA,φA);如果判断靶点方向线和Ⅰ井轴线的位置关系,则(x,y,z,α,φ)取值为(XT,YT,ZT,αT,φT)。
如果(x,y,z,α,φ)满足式(6),则说明两条直线共面;如果满足式(6)的条件下,不满足式(7),则说明两条直线相交。
若Ⅱ井起钻点方向线、靶点方向线都与Ⅰ井轴线异面,则Ⅱ井起钻点方向线、靶点方向线与Ⅰ井轴线的最短距离d1和d2可以由式(8)计算得到:

Ⅰ井轴线和Ⅱ井起钻点方向线的公垂线长度为1,公垂线的单位方向向量为td1=tA×to=(txd1,tyd1,tzd1)=(cosαosinαAcosφA-cosαAsinαosinφo, cosαAsinαocosφo-cosαosinαAsinφA, cosφAsinαosinαAsinφo- cosφosinαosinαAsinφA);靶点方向线与Ⅰ井轴线的公垂线长度为d2,公垂线的单位方向向量为td2=tThto=(txd2,tyd2,tzd2)=(cosαosinαTcosφT-cosαTsinαosinφo, cosαTsinαocosφo-cosαosinαTsinφT, cosφTsinαosinαTsinφocosφosinαosinαTsinφT)。
设Ⅰ井轴线和Ⅱ井起钻点方向线的公垂线与Ⅰ井轴线的交点为MA(XMA,YMA,ZMA),与Ⅱ井起钻点方向线的交点为AM(XAM,YAM,ZAM)。AM的坐标可以由MA的坐标推导而来:

当以t0方向为轴线,向量tA右旋时,取“+”号,向量tA左旋时,取“-”号。图6显示为左旋。
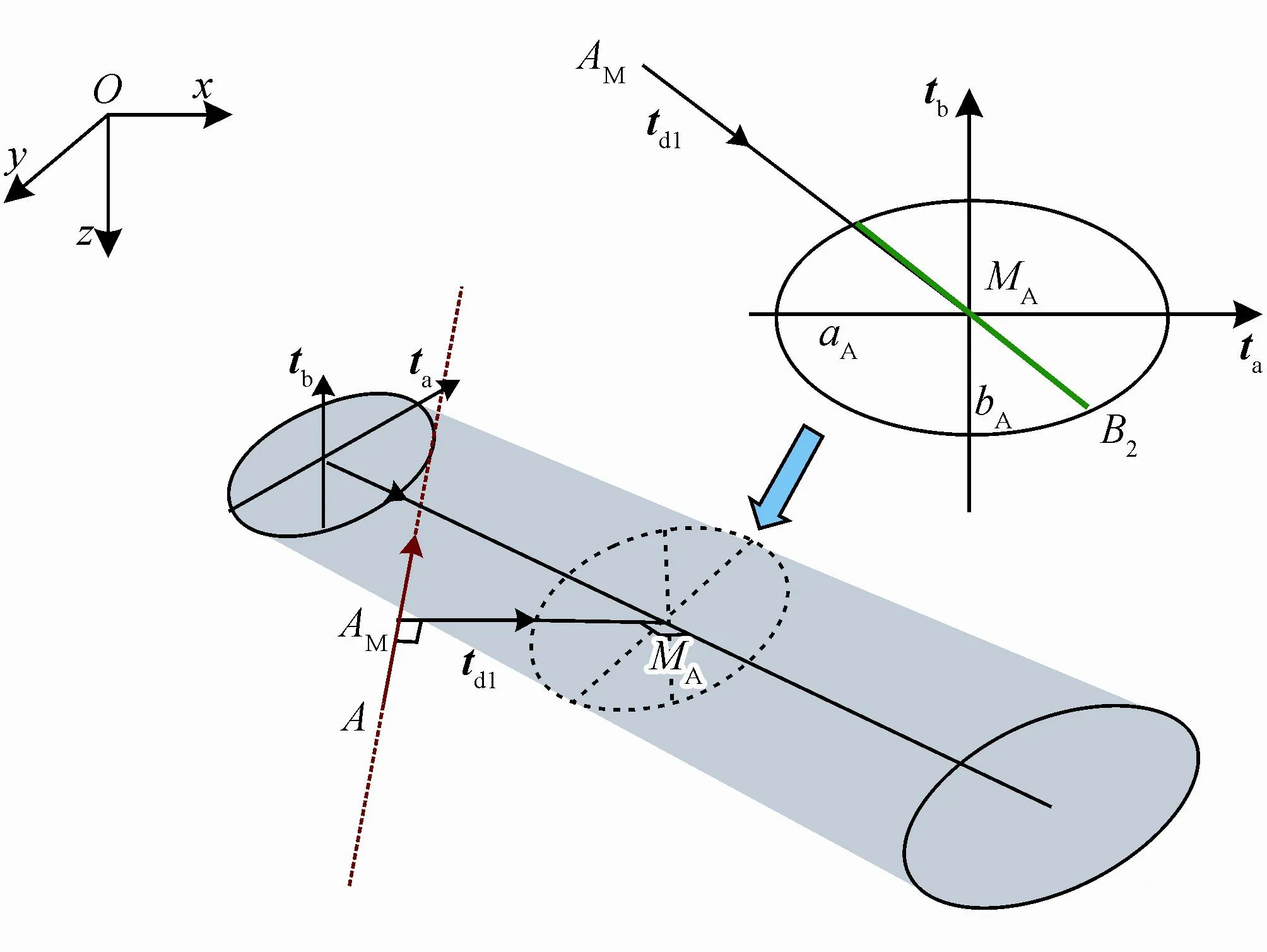
图6 Ⅱ井起钻点方向线的绕障半径计算示意图
要求得图6中MA坐标的值,需要将Ⅱ井起钻点方向线(3)、Ⅰ井轴线方程式(5)、式(8)与式(9)联立求解得到MA的坐标值。
求得MA的值后,就可以得知MA点与Mo点的距离,即式(1)中的l。求得l的值后,可由式(10)求得图6中l处截面椭圆的长轴长度aA和短轴长度bA:

线段AMMA和截面椭圆MA的两个交点在局部坐标系下的坐标和可以由式(11)求出:

特别的,当td1和ta相互垂直时,两个交点在局部坐标系下的坐标为(0,bA)或(0, -bA)。
Ⅱ井起钻点方向线的绕障半径RA的计算式为:

同理可以求出靶点方向线的绕障半径RT。
如果Ⅱ井起钻点方向线与Ⅰ井轴线的最短距离d1小于绕障半径RA,或者靶点方向线与Ⅰ井轴线的最短距离d2小于绕障半径RT,绕障轨道几何设计模型则采用图5-a模型;如果d1和d2均小于相应的绕障半径RA与RT,绕障轨道几何设计模型则采用图5-b模型。
2.3 绕障轨道优化判定
2.3.1 目标函数
传统的井眼轨道优化模型的目标函数多为设计轨道总长度最短。随着复杂井形的出现,评价设计井眼轨道的复杂程度对指导轨道设计具有重要意义,许多学者据此建立了各类定量和定性的方法去评价设计井眼轨道的复杂度[22-24]。其中,Samuel提出的井眼轨道势能这一概念[24]在几何上和物理上都能描述井眼轨道的复杂度,并验证了轨道势能越大,井下管柱摩阻扭矩越大这一规律。许多学者在Samuel的理论基础上,建立了井眼轨道优化模型,这些模型以井眼轨道势能最小作为目标函数[11,24-28]。
本文所建立的绕障轨道优化设计模型的目标函数包含了两个目标:较小的井眼轨道设计总长度和较小的井眼轨道势能:

式中ω1和ω2分别是轨道设计总长度和轨道势能的权重系数,0≤ωi(i=1, 2)≤1,;分别是归一化后的轨道设计总长度和轨道势能值,即

式中f1是轨道设计总长度Lw的优化结果,f2是轨道势能Ew的优化结果,是ω1=1时f1的优化结果,是ω1=1时f2的优化结果。
如图5-a所示,当绕障轨道几何模型采用“扭方位段+稳斜段+扭方位段”模型时,设计轨道总长度Lw的计算式如下:

式中L1和L2是扭方位段的长度,Lh为稳斜段长度。扭方位段设计模型采用被广泛应用的自然曲线模型,其计算方法参见文后文献[29],若采用其他模型,如空间圆弧模型、圆柱螺线模型、恒工具面模型等,扭方位段长度计算方法参考文后文献[26, 30-32]。
井眼轨道势能[24]这个概念被提出来用于评估井眼轨道的复杂程度,它的计算式为:

式中k(x)代表井眼曲率,rad/m;τ(x)代表井眼挠率,rad/m;L是井眼轨道的长度,m。
对于自然曲线上的任意点,该点的井斜角变化率为kα,i;方位角变化率为kφ,i;该点的井眼曲率为ki:

对于图5-a所示的设计井眼轨道,其轨道势能为:

如图5-b所示,当绕障轨道几何模型采用“扭方位段+扭方位段+扭方位段”模型时,设计轨道总长度Lw的计算式为:

对于图5-b所示的3段扭方位段的井眼轨道设计模型,其井眼轨道势能为:

2.3.2 约束条件
绕障轨道要能准确地按照设定的方向击中靶点,即:
式中N表示设计的井段数;ΔXi、ΔYi、ΔZi是第i井段在X,Y,Z方向的增量,m;ΔXAT、ΔYAT、ΔZAT是Ⅱ井起钻点A与靶点T在X、Y、Z坐标上的坐标值差,m;δ是可以允许的误差值,m;Li是第i井段的长度,m。ΔXi,ΔYi,ΔZi的计算已有成熟的公式模型,参见本文参考文献[26]。
受现场钻井工具等作业条件,以及地层性质的影响,扭方位段的绕障轨道井眼曲率,井斜角变化率,方位角变化率都有上下限,即:

每一段设计井段的长度Li也必须保持在一个合理的范围内,以确保模型能求解出最优值,即

在设计轨道上设置多个内插点P,其到Ⅰ井轴线的距离计算方法与2.2节相同,如果每个内插点与Ⅰ井轴线的距离都大于绕障半径,那么所设计的轨道就满足绕障的需求。
2.3.3 遗传算法
基于页岩气丛式水平井绕障轨道优化设计模型是一个非线性最优化问题,模型的目标函数、约束条件均为公式。这类优化模型的求解多采用启发式算法,如遗传算法,PSO算法等。其中遗传算法是使用最广泛的一种算法。
遗传算法[33]是通过模拟生物染色体在自然界优胜劣汰的准则下进化过程的一种随机全局搜索优化算法。在该算法中,通过适应度函数来评估每个个体适应环境的能力,通过轮盘赌选择等方法对不同个体进行甄别,个体通过染色体编码的选择、交叉和变异等过程来适应环境,以获得更优的适应度函数值。通过反复迭代,最终能获得函数的最优值(最适应环境的个体)。
本文所建立的模型将通过遗传算法进行求解,求解的步骤如下:①随机建立初始种群;②根据适应度函数确定单个个体的适应度,如果满足所设立的规则,那么得到最优解,如果没有满足,进行下面的步骤;③根据轮盘赌规则对种群中的个体进行选择,适应度高的个体被选中的概率大,适应度低的个体被选中的概率小;④根据染色体的交叉和变异编码,产生种群中的新个体;⑤新个体和经过选择的适应度高的个体形成新的种群,回到步骤②。
3 压裂段影响域防干扰的几何校核方法
在页岩气压裂区,设计井的压裂段影响域要避开已钻井的压裂段影响域,否则两口井的产能和井壁稳定性会受到影响。如图1所示,Ⅰ井为已钻井,Ⅱ井为待钻井。Ⅰ井的压裂段轴心线经过点M1(X1,Y1,Z1),轴心线单位方向向量为t1=(sinα1cosφ1, sinα1sinφ1, cosφ1),α1和φ1是M1点的井斜角和方位角,点M1的坐标和向量t1是已知的固定值;Ⅱ井的压裂段轴心线经过点M2(X2,Y2,Z2),轴心线单位方向向量 为t2=(sinα2cosφ2, sinα2sinφ2, cosφ2),α2和φ2是M2点的井斜角和方位角,点M2的坐标和向量t2是设计值。需要对设计井Ⅱ井的压裂段轨道设计值进行安全校核,如果Ⅱ井的压裂段影响域与Ⅰ井的压裂段影响域有重合,需要重新设计Ⅱ井的压裂段井眼轨道与压裂相关参数。
由于井眼轨迹的不确定性,压裂段影响域并不是现场所用以井眼轨迹为轴线,长轴半径80 m,短轴半径50 m[3]的椭圆柱状体,而是1.4节所建立的考虑了井眼轨迹误差域的椭圆台状耦合域。
如图1所示,当Ⅰ井与Ⅱ井两井轴心线的距离dⅠⅡ大于两个压裂段影响域的底面长半轴之和a1+a2时,两井的压裂段影响域无重合,即两井的压裂段防干扰的几何安全校核标准为:

要计算dⅠⅡ的值,首先要判断两井轴心线的空间位置关系,可根据式(6)、(7)来进行计算,如果两条轴心线同面相交,则需要重新设计Ⅱ井的压裂段井眼轨道。
如果两井的轴心线共面平行,轴心线距离可由式(25)计算:

如果两井的轴心线异面,轴心线距离可由式(26)计算:
通过式(25)或(26)的计算,可以得知设计井与已钻井压裂段影响域的轴心线距离dⅠⅡ,将其带入到式(24)中与两个耦合域底面长半轴之和a1+a2做对比,如果不满足式(24),则需要重新设计加密井的压裂段井眼轨道与压裂相关参数,改变M2坐标、t2与a2的值,使其满足式(24)。
4 案例分析
采用参考文献[13]中涪陵地区X1013井的数据,该井压裂段Mo坐标为(-625 m,-524 m,2 290 m),井斜角为87°,方位角为250°,L=1 530 m,根据该文献的模型计算,由井眼轨迹误差所形成的误差椭球在压裂段起始点的椭球长半轴半径长为37.5 m, 终点的椭球长半轴半径长为82 m,即由井眼轨迹误差所形成的圆台Ⅰ井,下底面半径r=37.5 m,上底面半径r*=82 m,L=1 530 m。
根据参考文献[3],压裂区压裂段影响域被视为长轴半径80 m,短轴半径50 m的椭圆柱,由压裂影响域所形成的椭圆柱Ⅰ井,底面长轴半径a=80 m,底面短轴半径b=50 m。
根据1.4节所述,由井眼轨迹误差域与压裂影响域形成的椭圆台耦合域,根据式(2),可以计算出下底面长轴半径a0=118 m,短轴半径b0=88 m,上底面长轴半径a0*=163 m,短轴半径b0*=133 m,L=1 530 m。对比井眼轨迹误差所形成的圆台Ⅰ井尺寸,可以得知当忽略压裂影响域时,Ⅰ井尺寸被严重低估。这会影响到压裂区绕障轨道设计,使得设计轨道无法绕开已钻井的压裂影响域。
Ⅱ井起钻点的坐标为(-921 m,-570 m,2 021 m),井斜角αA为60°,方位角φA=220°;靶点的坐标为(-122 m,-2 240 m,2 367 m),井斜角αT=90°,方位角φT=300°。根据式(6)~(7),得知Ⅱ井起钻点方向线,靶点方向线与Ⅰ井轴线之间的关系为异面,由式(8)得知Ⅱ井起钻点方向线与Ⅰ井轴线的最短距离d1为380 m大于绕障半径RA,(即107 m),靶点方向线与Ⅰ井轴线的最短距离d2为47 m小于绕障半径RT,(即112 m)。因此采用图5-a所示的模型。
由本文参考文献[2]可知,涪陵焦石坝区块大位移水平井的造斜率不超过5.5e/30 m;每一个设计段的长度不能大于Ⅱ井起钻点与靶点之间的距离,且不能小于0;结合焦石坝区块众多大位移水平井的设计统计资料,设计参数的取值如表1所示。

表1 案例分析井眼轨道优化设计参数范围表
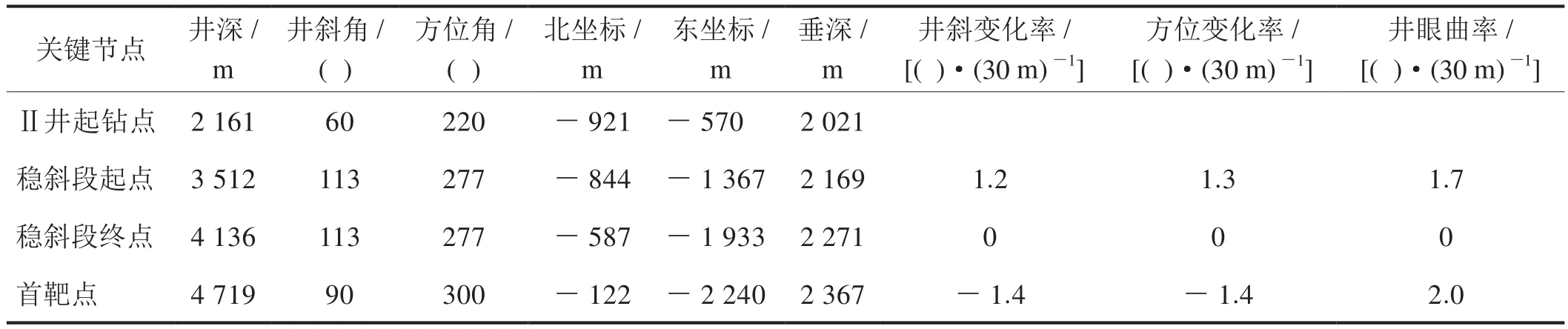
表2 案例分析井眼轨道优化设计结果表
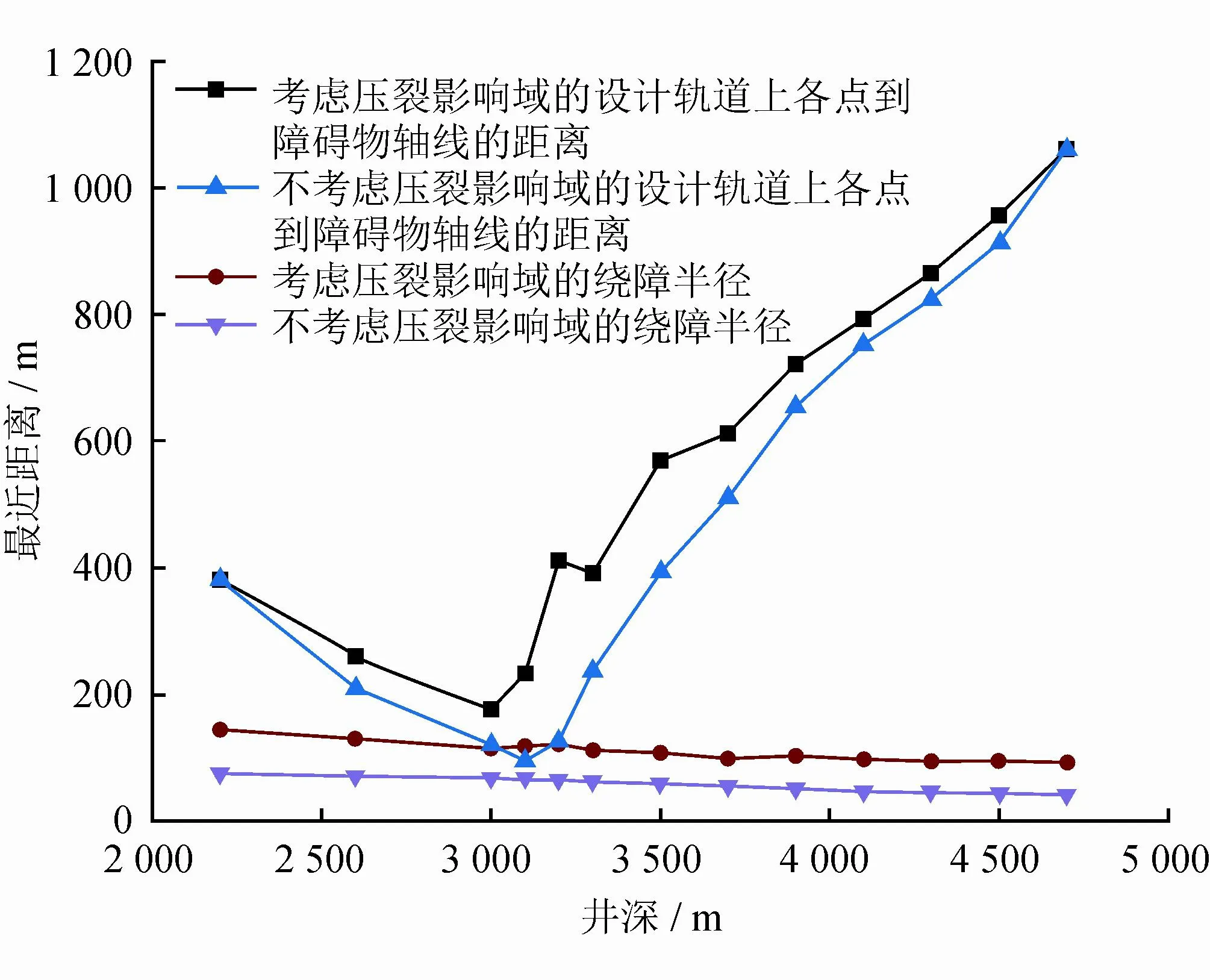
图7 设计绕障轨道防碰风险示意图
在遗传算法参数中,种群规模初始设置为300,迭代次数为200,交叉概率为0.8,变异概率为0.1,ω1=ω2=0.5。表2给出了优化后的绕障轨道设计结果。
如图7所示,黑色实线为考虑压裂影响域的绕障设计轨道上各点到Ⅰ井轴线的距离,蓝色实线为不考虑压裂影响域的绕障设计轨道上各点到Ⅰ井轴线的距离,红色实线为考虑压裂影响域的Ⅰ井绕障半径随井深变化的趋势,粉色实线为不考虑压裂影响域的Ⅰ井绕障半径随井深变化的趋势。
如图7所示,如不考虑压裂影响域,仅考虑井眼轨迹的不确定性,压裂区由老井压裂段所形成的Ⅰ井的尺寸会被大大低估,绕障半径值会降低,由此造成3 000~3 300 m井段上设计绕障轨道与考虑压裂影响的Ⅰ井区域相交,在实际作业过程中,可能会引发钻井事故,并影响老井的产能;如果考虑压裂影响域,设计井眼轨道到Ⅰ井轴线的最近距离为176 m,大于该位置处的绕障半径115 m,即笔者模型设计出的绕障轨道既考虑了井眼轨迹的不确定性(黑线不与粉线相交),又满足了绕开老井压裂段压裂影响域的要求(黑线不与红线相交)。
5 结论
1)针对页岩气压裂区部署加密调整井所面临的井眼轨道防碰问题,建立了针对页岩气压裂区的绕障轨道优化设计模型,该模型的优化目标综合考虑了较小的井眼轨道长度和轨道势能,能保证钻井作业的经济性与安全性,并且避免了一般绕障轨道设计方法中存在的多次试算、复杂校核等问题。
2)传统的绕障井眼轨道设计问题在Ⅰ井区域的几何模型建立上,只考虑了井眼轨迹的不确定性,本文针对页岩气压裂区加密调整井的特殊工况,考虑了压裂影响域,建立了专门针对页岩气压裂区老井压裂段Ⅰ井的几何模型,该几何模型既考虑了井眼轨迹误差,又考虑了老井压裂段压裂裂缝的影响。
3)通过案例分析可以得知,在页岩气压裂区,针对已钻井的压裂段,如果只考虑井眼轨迹误差,不考虑压裂影响域,那么Ⅰ井的几何尺寸会被大大低估,所设计出的绕障轨道可以避开已钻井的井眼轨迹,但是可能会与已钻井的压裂影响域相交,引发钻井事故,并影响已钻井的产能。
4)针对压裂区加密调整井的压裂段影响域与已钻井(老井)压裂段影响域之间可能出现的相互干扰问题,根据本文建立的考虑井眼轨迹误差和压裂影响域的压裂段Ⅰ井几何模型,建立了判断不同压裂段影响域之间是否存在相互干扰的几何校核方法,可以用来快速评估加密调整井压裂段井眼轨道设计方案的合理性,该计算方法公式简单,计算便捷。
