汽车油门防误踩智能控制装置设计
2020-10-13魏丽
魏丽

摘 要: 在对现有相关设计的优势与不足进行分析的基础上,根据汽车油门防误踩需求,完成了一种汽车防误踩智能控制方案的构建,通过综合运用雷达和相关功能的传感器完成对车辆行驶信息的实时采集,通过对比预设的阈值并结合运用模糊算法完成智能分析过程,在此基础上实现对汽车油门防误踩的智能控制过程,显著提升了控制过程的实时性和智能性,可使因驾驶员紧张等因素而在刹车时误踩油门的问题得以有效避免,能够辅助驾驶员安全驾驶。
关键词: MSP430单片机; 汽车油门防误踩; 智能控制系统; 怠速控制
中图分类号: U 463.6 文献标志码: A
Abstract: Based on the analysis of the advantages and disadvantages of existing related designs, this paper completes the construction of an intelligent control scheme for anti-misstepping of automobiles based on the requirements of anti-misoperation of automobile throttles. The function of the sensor completes the real-time collection of car driving information. Based on comparing preset thresholds and combining the use of fuzzy algorithms, this paper completes the intelligent analysis process. Thus, the intelligent control process for preventing accidental stepping on the accelerator of the car is significantly improved, i.e., significantly improving the control process. It can effectively avoid the problem of accidentally stepping on the accelerator if braking due to factors such as driver tension, and can assist the driver to drive safely.
Key words: MSP430 single-chip microcomputer; anti-accidental accelerator pedal of automobile; intelligent control system; idle speed control
0 引言
随着人们生活水平的提高,汽车已经成为日常出行不可或缺的主要交通工具之一,汽车的保有量随之不断增加,在为日常生产生活带来巨大便利的同时,其所导致的交通安全问题也日益突出。促使汽车相关的主动安全技术及控制系统成为汽车行业的一项研究重点。由误踩油门引发的交通事在所有交通事故中占比较大,开展防误踩技术及控制系统方面的研究已经成为有效避免此类事故发生的重要手段,具有较高的理论研究和实际应用价值。目前国内在汽车防误踩方面的研究虽然已取得了一定的进展,但在防误踩系统构建的关键技术(包括误踩判定标准的制定、车辆实时行驶状态信息的有效检测及对误踩的判断和控制等)仍然有待进一步优化和完善[1]。
1 现状分析
快速发展的汽车产业为人们日常出行提供了便利的交通工具,汽车的数量不断增多,频繁发生的交通事故则使生产企业及用户对车辆行驶安全的重视程度不断提高,在驾驶员发现前方较近距离有障碍物需进行刹车操作时,及易因紧张而误踩制动踏板酿成交通事故,作为一种汽车主动安全技术油门防误踩技术可有效避免误踩引发的安全事故,基于现有的汽车操控系统通过汽车避障及误踩的智能控制系统的设计与实现是解决问题的关键所在,目前汽车防撞系统的种类较多,但普遍缺失对防误踩系统的深入研究,传统的防误踩控制系统因智能水平较低而难以满足市场需求,有些设计方案的实现需要改变汽车原有机械操作结构,导致驾驶员难以适应,并且难以准确区分驾驶者急踩油门是否属于误踩油门。国内外关于油门防误踩方面的技术设计方案主要包括机械式和电子式,已投入应用的传统机械式技术方案及机械式的油门防误踩系统虽相对较为成熟,但也存在整体构造较复杂、整体测量的精度不高、可靠性及实用性不高等不可避免的缺点,需要较多的外部支持,种类及数量繁多的部件增加了控制系統整体的复杂程度,在增加使用和维修难度的同时,增加了设计和维护成本,该类机械式系统通常需专门设计、仅适用某系列车型,可移植性不高不利于普遍推广[1]。
2 汽车油门防误踩智能控制系统的设计与实现 针对现阶段国内行车安全辅助设备存在的功能分散、系统安装复杂度较高且相互间存在干扰、成本昂贵等问题和不足,本文基于汽车原有机械操作结构的研究成果,设计了一种电子式的基于MSP430单片机的汽车油门防误踩智能控制系统,能够对相关检测阈值进行设计并对车辆行驶状态进行实时检测,通过智能算法对比计算车辆状态和阈值间的差异,据此判断出是否存在误踩操作。通过对汽车的智能检测和控制实现对驾驶员操作意图的真实反映,从而确保行车安全,该智能油门防误踩系统有效降低了使用及运维成本,具备较高的检测精度和控制精度,并且易于扩展。
2.1 控制系统总体架构设计
本文设计的控制系统总体架构示意图,如图1所示。
主要由信号采集模块、主控模块、执行模块3个模块构成,系统的工作原理可描述为:驾驶员在车辆行驶过程中踩油门踏板时,节气门开度信息由节气门传感器负责采集,压力信息(f)由油门压力传感器负责采集,障碍物距离信息(l)通过雷达完成测量,再由信号采集模块分别完成油门踏板加速度信息(a)、所有传感器信息及测量信息的采集后,同控制系统中的预设阈值进行比较,系统在相关参数同时满足油门误踩信息判断标准的情况下判定为驾驶员误踩油门,由主控模块驱动执行模块通过控制节气门不产生开度实现发动机怠速,启动车辆报警系统,同时通过驱动步进电机拉动连接刹车系统的钢丝,辅助汽车制动[2]。
2.2 核心模块功能的实现
2.2.1 信息采集模块
该模块主要负责采集车辆行驶状态相关信息,具体通过使用各类智能传感器实现,主要包括节气门位置、测距雷达、油门踏板压力及加速度4类传感器,在4类传感数据信息同时满足油门误踩判定要求的情况下由主控模块驱动执行模块动作。
(1) 节气门位置传感器(即节气门开度传感器),该传感器主要负责完成对节气门的开度和时间两个关键参数的测量,汽车节气门的开度和变化时间在正常加速和突发状况下的加速过程呈现出较大的差异,驾驶员在紧急情况下误踩油门通常会踩到底,进而导致节气门开度快速增至最大;节气门开度在车辆正常加速行驶时则慢慢增大,需通过反复试验测试确定节气门开度的阈值,超过此阈值则可判定汽车非正常提速。
(2) 测距雷达,现有常用的测距方法主要通过利用超声波、红外线和雷达等完成距离测量,考虑到超声波及红外测距存在精度偏低的不足,难以有效满足车辆油门防误踩智能控制系统的精准测量需求,雷达测距具备较强的穿透力、抗干扰能力及反隐身能力,基本不受雾、烟等恶劣天气条件的影响,可有效满足本文控制系统在各种条件下的工作需求;测量距离范围较广,可使控制系统功能在宽阔复杂的道路上得以充分发挥;测距模块体积较小的雷达具备较高的分辨率,能够对车辆前方障碍物距离进行主动测试并获取较为精准的数据结果。通过对适合系统使用的各种雷达进行对比分析后选用了采用可靠的固态技术的ESR毫米波雷达(美国Delphi),该款雷达长短距离二合为一、无移动部件,抗恶劣环境和振动的性能较佳,在性能、封装和耐久性方面具备极大的优势,采用单个雷达即可满足多个安全系统的使用需求,包括针对间隔距离及前方碰撞的告警、刹车控制及自动巡航控制等,有精确的多目标区分能力(包括距离、速度和角度数据),可完成脉冲多普勒波形的同时发送和接收,不影响车辆造型的同时易于集成到现有车型中,用于输出精确的测量数据[3]。
(3) 油门踏板压力传感器,压力传感器选用了电阻式薄膜压力传感器,具备厚度较薄、精度较高、易弯曲、性价比较高的优势,将该传感器安装于车辆踏板处,完全不影响驾驶员驾驶,突发状况的脚作用力大可达几百,而正常行驶过程踩油门的力度约为几十N,考虑到踏板受力情况会因人而异,因此本文选取了100位驾驶员作为实验样本进行测试,踩踏板的力度数据统计结果为:正常踩踏时的踏板压力在90-190N区间内、紧急踩踏时的踏板压力在160-295N区间内、误踩踏时的踏板压力在295-490N区间内。油门在紧急情况踩踏和误踩时表现出一定的差异性,驾驶员误踩油门时的压力超过设定的阈值(f0 =295 N)时,系统即可判定该驾驶操作属于误踩油门[1]。
(4) 油门踏板加速度传感器,选用了较为流行的MPU-6050传感器(属于一种空间运动传感器芯片),具备体积小、能耗低、精度较高的优势,可获取3个加速度分量和3个旋转角速度,将该传感器安装于踏板的底部,相比于正常行驶情况下的加速踩踏板,驾驶员在误踩油门时的踩踏速度要快数十倍,针对正常踩踏、紧急踩踏和误踩3种情况同样选取100位驾驶员进行统计测试,踩踏板的加速度数据测试结果为正常踩踏时的加速度在7.4-9.0区间内、紧急踩踏情况下的踩踏板加速度为31.6-39、误踩踏情况下的踩踏板加速度为122.3-139.0(单位:m/s 2),3种踩踏情况下的加速度的差别较大,综合上述测试数据为安全起见,将油门踏板加速度阈值(a 0)设置为=40 m/s 2 ,系统在油门踏板加速度超过阈值时驱动执行模块执行相关动作指令[4]。
2.2.2 主控模块
作为系统的重要构成该模块负责完成对全部数据的分析对比(并据此作出准确判断)以及对执行模块动作的驱动功能,本系统的主控模块选用了MSP430单片机(美国德州仪器有限公司,一种混合信号处理器),该单片机具备功耗低、数据运算及处理能力强、片内资源丰富、灵活方便等优势,MSP430具有精简指令集(RISC),内部集成了看门狗电路、ADC、DAC、FLASH等,具备较多中断源的MSP430 单片机可以任意嵌套。处于低功耗状态下的系统的中断唤醒仅需5μs。包含OTP 型、FLASH 型和 ROM 型3类,内置JTAG调试接口的FLASH型具有便捷高效的开发调试环境,含有可电擦写的 FLASH 存储器,可先在 FLASH内下载程序,然后在器件内执行软件控制程序,供设计者通过使用片内信息(由JTAG 接口读取)完成調试过程,无需仿真器和编程器,仅需使用PC机和JTAG调试器,开发语言采用C语言[5]。
2.2.3 执行模块
(1) 怠速控制系统,在控制系统完成对驾驶员存在误踩油门操作的判断时,传统的防误踩系统大多采用断开油路的方式实现减速功能,在行驶过程中突然断油的汽车会对车辆的平稳性产生较大的影响,存在一定的安全隐患,为此本控制系统在判定误踩油门后通过主控模块实现对节气门开关状态的控制,空气会绕过被关闭的节气门进入到进气歧管,使汽车发动机进入怠速状态,从而辅助汽车制动功能更好的实现。
(2) 驱动电机和报警系统,汽车的刹车系统和电机间使用钢丝相连,该系统的主控模块在判定为油门误踩时通过启动步进电机实现对钢丝的拉动操作,进而实现刹车系统制动功能,采用L298N(一种专用的控制芯片,技术发展较为成熟)作为电机控制电路,该芯片可根据实际需求控制电机的转动;报警系统会根据判断结果及时提醒驾驶员,具体采用了驱动蜂鸣器电路实现告警功能[6]。
2.3 软件流程
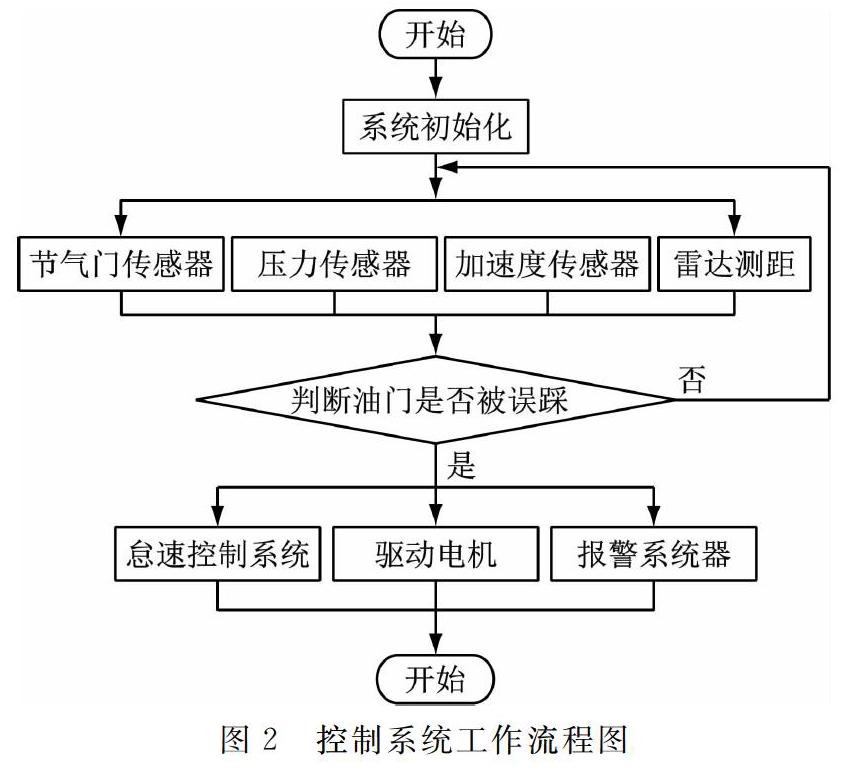
汽车油门防误踩智能控制系统基于采集到的相关传感器信息数据(包括节气门开度信息、障碍物距离测量信息、油门踏板压力信息及加速度信息参数),完成对是否存在油门误踩情况的分析和判断,在判断结果为误踩的情况下立即驱动执行模块动作,具体通过控制节气门实现发动机怠速、通过驱动步进电机拉动连接刹车系统的钢丝帮助汽车制动,同时启动车辆报警提示功能;在不符合误踩条件的情况下返回到初始状态继续采集和判断行车信息,确保车辆正常行驶。控制系统[7]具体工作流程如图2所示。
3 系统测试
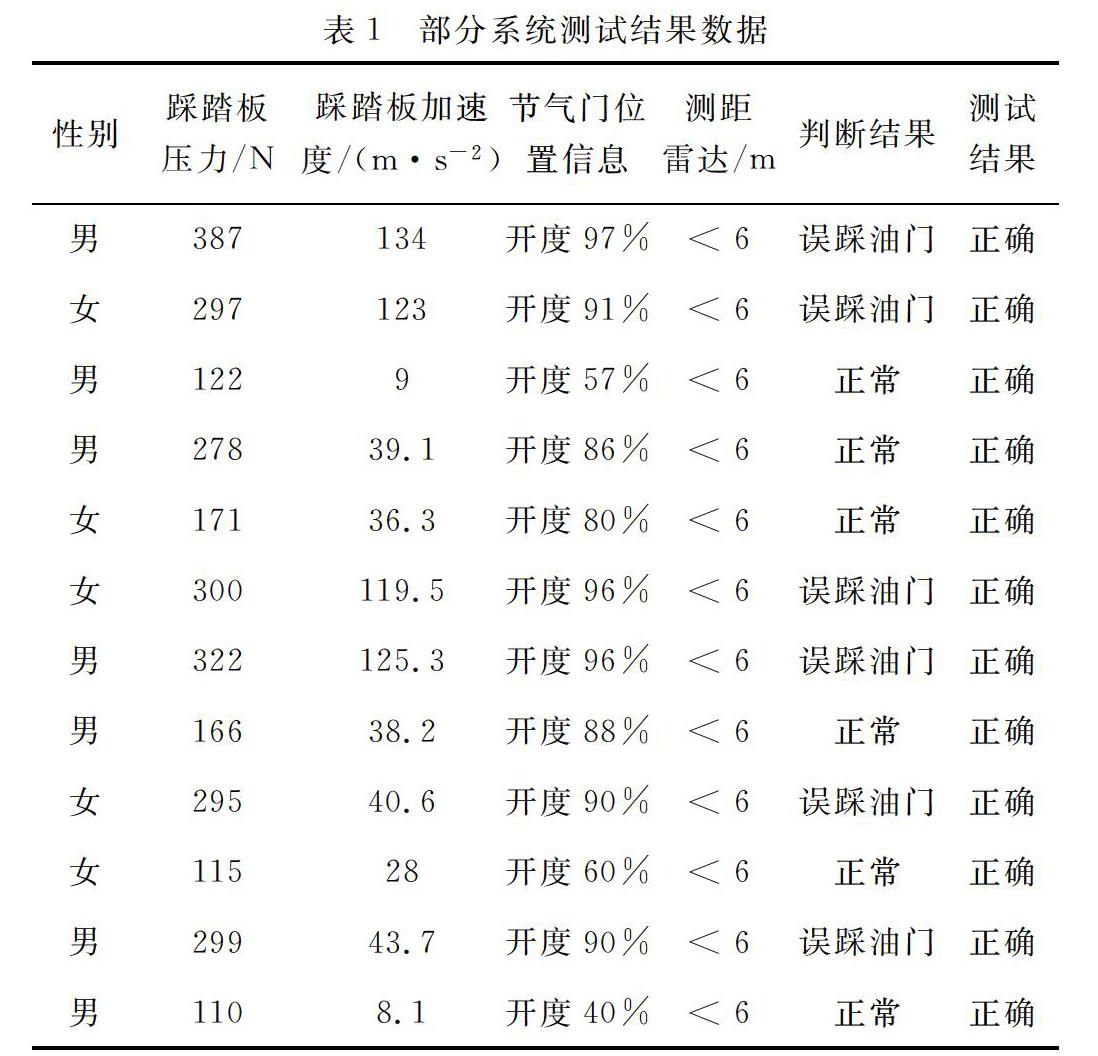
为检测本文所设计系统的实用性和可靠性,在实验室中进行了正常及误踩两种情况下的模拟测试,选择不同年龄层和性别的40名志愿者作为测试对象,部分统计测试结果如表1所示。
40人测试全部成功,在系统检测到节气门有开度信息、油门压力超过295 N、油门踏板加速度超过40 m/s2、雷达测试距离小于6 m的情况下,该控制系统能够准确判断出油门误踩,并立即驱动执行模块动作、向驾驶员发出报警提示,使防止误踩及误踩时采取有效措施的目标得以有效实现,证明系统具备较高的实用性和可靠性[8]。
4 总结
在驾驶员实际驾驶车辆过程中极易发生误把油门当成刹车的问题,为有效避免紧急刹车时误踩油门问题的出现,本文主要对汽车油门防误踩智能控制系统进行了设计,在对现有相关设计的优势与不足进行分析的基础上,完成了一种汽车油门防误踩智能控制系统的设计,该系统基于MSP430单片机实现智能控制过程,汽车的行驶信息通过使用节气门位置、油门压力及油门加速度传感器、测距雷达进行采集,将获取的智能控制参数对比预设阈值并进行智能分析,据此完成对驾驶员踩油门意图的准确判断,在确认发生油门误踩后立即通过采取发动机怠速控制及紧急制动功能确保车辆能够安全行驶。
参考文献
[1] 方健.基于传感器融合的汽车智能油门防误踩系统设计[J]. 装备制造技术, 2018(2):50-52.
[2] 王明吉,牛贺,张勇.汽车油门防误踩智能控制系统方案设计[J]. 电子设计工程, 2017(4):56-58.
[3] 汪磊,周力,孙浩.基于ARM+DSP的汽车防追尾控制系统的研究[J]. 井冈山大学学报(自然科学版), 2018(1):77-80.
[4] Chih-Yung Chen,Hsuan-Ming Feng. Hybrid intelligent vision-based car-like vehicle backing systems design[J]. Expert Systems With Applications. 2008 (4):7500-7509.
[5] V Milanés,C González,J E Naranjo,et al. Electro-hydraulic braking system for autonomous vehicles[J]. International Journal of Automotive Technology, 2016 (1):89-95.
[6] 黃希宾,郑忠才,高岩,等.汽车紧急制动时钢板弹簧有限元分析[J]. 内燃机与动力装置, 2012(1):32-34.
[7] 郭昊,岳甲,陈功想,等.具有速度阈值的汽车油门误踩机械锁止装置设计[J].河南科技学院学报(自然科学版),2017(1):65-70.
[8] 吴科甲,吴乙万,李凡,等. 基于电机/液压制动系统协同控制的电动汽车稳定性控制研究[J].机电工程, 2018(7):721-727.
(收稿日期: 2020.02.20)
