BP神经网络PID算法在液位控制系统的应用研究
2020-10-13孟凡顺张景扩李东亚袁继斌邵世硕
孟凡顺 张景扩* 李东亚 袁继斌 孙 哲 邵世硕
(1.苏州大学应用技术学院,江苏 苏州 215300;2.枣庄矿业(集团)有限责任公司铁路运输处,山东 枣庄 277100)
在工业生产中,人们常常需要对液位进行检测与调节。基本工作过程为:液面过高时,输入液体控制阀关闭,输出液体控制阀打开,进行排放;液面过低时,输出液体控制阀关闭,输出液体控制阀打开,进行存储功能。
本文采用PLC控制,所实现的功能远超传统的继电器控制电路,具有可靠性高、抗干扰能力强、体积小,重量轻,功耗低等特点,能够为自动化控制应用提供安全可靠和比较完善的解决方案[1]。采用PID算法来调节水位,PID算法凭借参数少、效果好、经济可靠等优秀的综合性能,在工业控制中经常被采用,PID的控制效果由比例、积分和微分参数决定,PID中的比例、积分及微分控制参数要经过一系列的方法进行整定,正确适当的参数设置能够让控制设备在静态与动态中的能力更强,将BP神经网络作为基础的PID计算方式是把BP神经网络的计算方法与PID参数整定融合起来的一种更加先进的计算方式[2-3]。图1为BP神经网络与PID算法结合后的原理图。
1 算法分析
1.1 PID控制算法
PID控制算法对于简单的线性系统控制具有良好的控制表现,PID控制凭借着调整部分少、效果优、可靠高等优良的综合性能,在工业控制领域内被广泛采用,PID的控制原理图由3部分进行对被控对象的控制,PID控制器参数和控制性能的关系主要从控制系统的稳定性、系统响应、超调量及稳态误差这些方面对系统中的控制效果进行评价。在PID的调节中,Kp-比例、Ki-积分、Kd-微分3项系数指数对控制器的工作效果也存在着很大的改变。PID控制原理如图2所示。
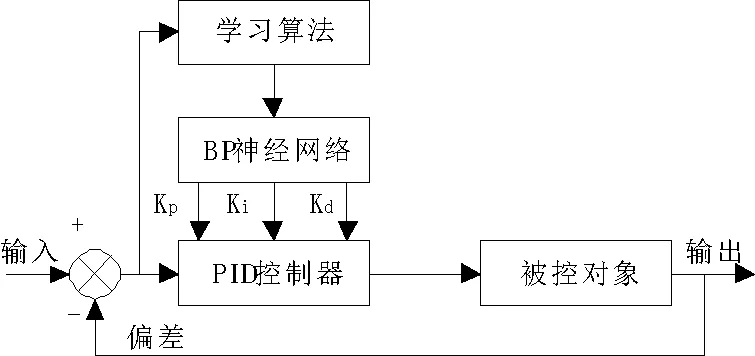
图1 BP神经网络与PID算法结合后的原理图
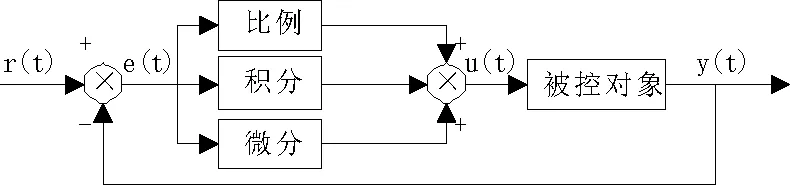
图2 PID控制原理图
PID控制算法中的比例、积分和微分具体作用如下:
(1)比例作用。Kp是比例系数指数中反映系统工作时的反应速度的。如果系统发生了误差,这时Kp发挥它的作用,将误差减少到最小。Kp越小,说明这时系统中所发生的工作反应速度慢,然后随着Kp的增长,系统中所发生的工作反应速度也会随之增长,但如果Kp太大时,对系统中的工作不友好,系统容易受到干扰,比例部分不能使被控量达到设定值,所以纯粹的比例控制不能去除系统中的稳态误差[4-5]。
(2)积分作用。Ki是积分系数指数中反映系统中的稳态误差进行消除工作的系数。在这过程中,如果误差在系统中表现出来,Ki会一直计算,然后进行累积,不断地将累积的进行输出,将系统中的误差填满之后,停止工作。Ki的设置很关键,要根据系统中的条件设置适宜值,如果Ki的存在不够让系统达到平衡,会导致超调量大,进而影响系统的动态性能。
(3)微分作用。Kd是用来对误差进行预测及抑制,Kd的存在将使系统中的调节时间大大减少。但是Kd的存在也有一定的劣势,使系统的抗干扰性降低,因此Ki的设置也很关键。
1.2 BP神经网络算法
BP神经网络算法工作过程为:选择任意一组权值,将设定的目标输出作为线性方程的代数和去构建线性方程组,获得待求权。BP神经网络算法可以学习并储存众多的输入-输出映射关系,而这种映射关系的数学方程并不需要过多描述。利用最速下降法的学习规则,并通过反向传播不断调节BP神经网络算法中的权值和阈值,将BP神经网络算法的误差平方和降至最小[6]。图3为BP神经网络算法结构图,结构包括输入层、隐含层以及输出层。根据其擅长求解内部机制复杂的问题及具备自主学习的能力,该算法被广泛使用。

图3 BP神经网络算法结构图
2 液位控制方案的确定
本文的控制器由西门子S7-1200 station CPU实现算法和控制,通过博图V14进行软件编辑、界面设计、仿真、调试等工作。PLC在具体工作时,首先是顺序读取输入端子的状态,并将读取的信息存至内存中的输入映像寄存器。按先左后右,先上后下的步序,逐行扫描程序。输出锁存器保存寄存器的状态,经过各种电路的处理,使输出端子对外输出控制信号保持外部负载工作。
本文将水箱液位作为被控对象,同时将水箱液位作为调节参数,图4为液位仿真系统界面。BP神经网络PID算法液位控制系统系统包含2部分:一是PID控制器,利用比例、积分、微分参数对水箱液位闭环控制。二是BP神经网络,根据水箱液位的表现情况不断调整和优化PID中比例、积分、微分参数,进而调节电动调节阀开度大小,实现液位调节。
3 液位控制系统的仿真
本文采用Matlab进行BP神经网络PID算法液位控制系统仿真,图5为BP神经网络PID算法液位控制系统仿真曲线。可以看出:利用BP神经网络PID整定后的水箱液位函数曲线具备较强的跟踪特性,整个系统在启动时可很快地调整参数,超调量较小,过渡时间短,具有更好的动态特性和稳定性能,保证整个控制系统具备较优的性能。

图4 液位仿真系统界面
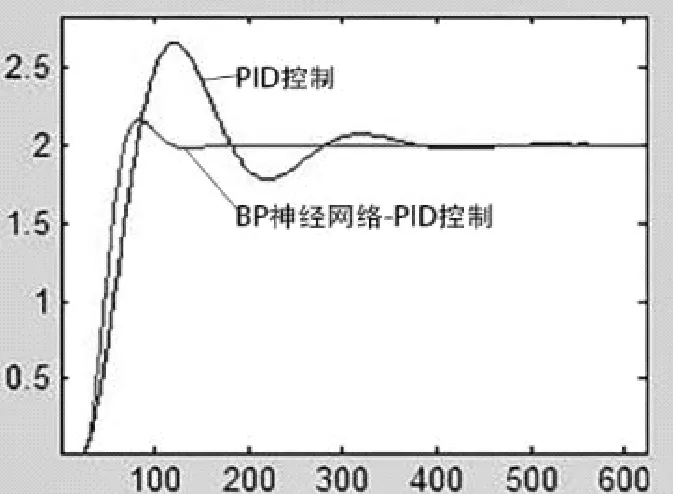
图5 BP神经网络PID算法液位控制系统仿真曲线
4 结语
本文基于西门子PLC平台,提出了基于BP神经网络的PID控制算法,去获得最优的比例、积分和微分控制参数,实现对液位控制系统更好地检测和调节。实验显示,BP神经网络的PID控制算法相比常规的PID算法控制,具有响应快、过渡平稳、超调量小、调整时间短等优势。
