基于信息物理融合系统的时空建模方法
2020-10-13江奕勋张立臣
江奕勋,张立臣
(广东工业大学计算机学院,广州510006)
0 引言
信息物理融合系统(Cyber-Physical Systems,CPS)是计算单元和物理世界的结合体和统一体,是包括了云计算、网络通信与传感器控制为一体的新一代物联网系统。信息物理融合系统使用更便捷的人机交互模式,从而实现和物理世界的交互,它使用分布式的网络通信用高可靠性的、远距离的、实时的、深度融合的方式来控制分布在不同地方的传感器实体和管理单元。
信息物理融合系统包括了大量的分布式环境感知器、大数据计算和网络通信等不同领域的系统工程,使CPS 具有强大的计算能力、不同实体单元远程深度协作和系统自治功能[6]。它非常注重计算资源和物理资源的紧密融合和协调处理能力,应用的领域有很多很多,例如说工业互联网、智能工厂、智能家居、智能机器人、V2V 技术等。
CPS 是在分布在各地的传感器的环境感知能力的基础,深度融合计算、通信和控制能力的可控可信可扩展的网络化物理设备系统,以稳定、可靠、便捷和不间断的方式感知和控制一个物理实体。不仅如此,还具有强大的自适应能力,能自动排除系统中的故障,从而让系统高效可靠的运转。
CPS 的结构是3C 技术(Computation 计算、Commu⁃nication 通信、Control 控制),通过它们的有机协作来实现物理世界和信息世界的数据和指令的传输,来实时的控制这个系统。如图1 所示。
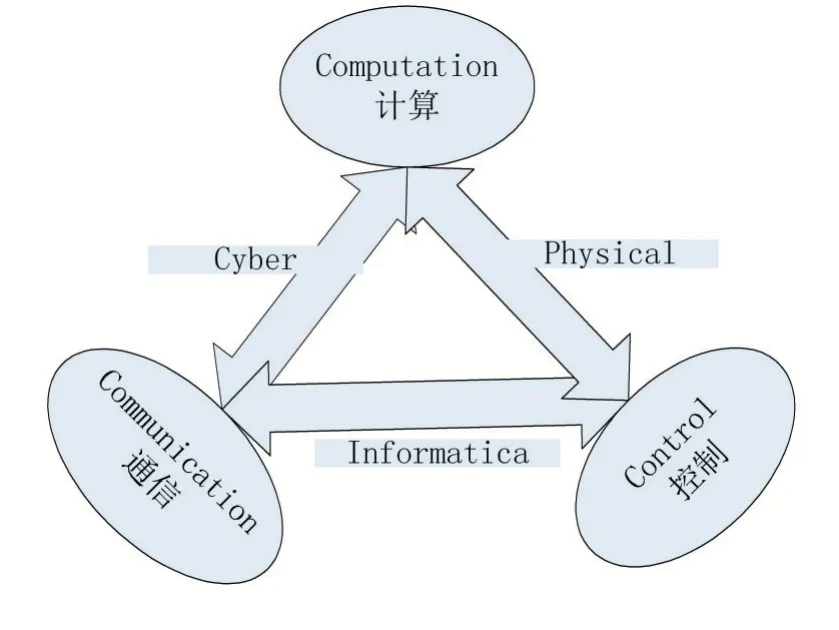
图1 CPS的结构
1 时空特性
1.1 时空模型的应用
什么是时空特性?就是有时间的属性和空间的属性两个维度。与之相对应的,时空数据的特点既有时间的属性也有空间的属性。在我们的日常生活中,时空特性的例子有很多很多。
每个人的手机都会和电信移动运营商的网络基站进行时刻的定位,它可以获取移动终端用户的位置信息(经纬度坐标),我们可以通过这些基站定位,来分析人群的流动趋势,可以了解人群活动时空特征。利用手机定位技术采集大量人群的出行信息具有实时性高、低成本低、样本大等优点[1]。通过这些实时的时空数据,经过分析后,为我们可以更合理的安排和疏导交通提供非常重要的帮助。
还有汽车的导航系统。通过它可以实时的知道道路的交通情况,规划自己的交通路线,更方便合理的安排自己的出行。
在工业生产中也同样具有时空特性。我们可以通过汽车总装线生产的物流优化,完成对汽车总装线上不同工位的工作时间、工人数数据采集。有了这些数据以后,为决策者提供有效的建议,使得我们能够更合理规划生产的节奏。
那么什么是时空数据呢?首先,时空大数据的来源有很多,例如手机基站对我们智能手机的定位数据,例如社交媒体的时空数据挖掘,从而挖掘探索大量用户的时空行为模式。更宏观的还有人口的迁徙数据,例如不同地域不同时间的人口密度、人口来回移动的信息。这些数据都具有相同的特点,那就是它们既有时间属性也有空间属性。
上述这些情况会产生大量的数据可供我们研究,这些就是时空数据的分析和应用。
实际上,时空Petri 网的应用场景有很多。众所周知,汽车产业是一个庞大的产业集群,它需要从各类供应商中采购生产所需的,然后在车企,也就是整车厂对汽车的零部件进行组装,当然整车厂自身也会生产一些重要的汽车组件。然后将汽车发往4S 店进行销售。汽车企业的业务流程可以看作是一个紧密连接的上下流供应链,并将不同阶段的生产运输,把供应链划分成几个相互协同作业的独立的子系统。一辆汽车的生产制造往往需要无数家企业来提供零配件,零配件生产企业从接到生产订单,到生产完成,然后运输到整车厂手中,这往往需要耗费很多的时间,而且这些零配件生产企业经常分布在不同的地区,为汽车的供应链增加了难度。整车厂在生产完成了以后,考虑到4S 店分布在全国各地,因此整车的运输需要精心调配运力来予以解决[2]。
1.2 时间逻辑的规范
时间逻辑通常是用于描述系统规则并且把它作为模型的表达和推理。时钟理论是解决模型中时间约束形式化的方法,它提出将概念性的物理世界和计算逻辑合二为一。它的理论包括了时钟规格,从连续的事件到离散的事件之间的互相映射的系统,它可以用来分析和推断事件的变化顺序。基于时钟理论的物理信息融合系统规范让每个事件的时间描述变得更加清晰,每个事件之间的时间影响更加精确。
1.3 空间逻辑的规范
空间逻辑是通过数字逻辑和形式化描述来对空间进行表示和推理。空间逻辑规范的原语包括基于点的和基于区域两种不同的类型,在距离模型的研究中,主要是基于点的研究,而在基于空间模型的研究中,并且更多地倾向于使用区域来作为研究,例如经常在空间拓扑关系中表示模型广泛使用的Petri 网。Petri 网是一个用途非常广泛的著名的关系代数推里模型它利用关系代数推理二进制中区域之间的关系。
1.4 Petri网
Petri 网(Petri Nets,PN)是1962 年由Carl Adam Petri 所提出的。这种理论结合了数学和图形,是一种全新的建模方法。首先,Petri 网有着坚实的数学理论,其次它还能以图形化的方式来描述系统。它采用直观的图形和严谨的数学语言[3]。Petri 网在分布式系统、异步网络、高并发的计算系统有着广泛的应用。通过使用Petri 网来分析系统,能有效的降低编写应用程序的难度,为设计者提供帮助,因此本论文将会选取Petri网理论为基础来对CPS 的时空特性进行分析。
首先让我们从简单的Petri 网的定义开始。
一个基本Petri 网是将会满足如下条件的三元组N=(P,T;F),其中P 是Place,被译为库所;T 是Transi⁃tion,被译为变迁;F 是Flow Relation,它是库所和变迁之间的依赖关系,被称为流关系。
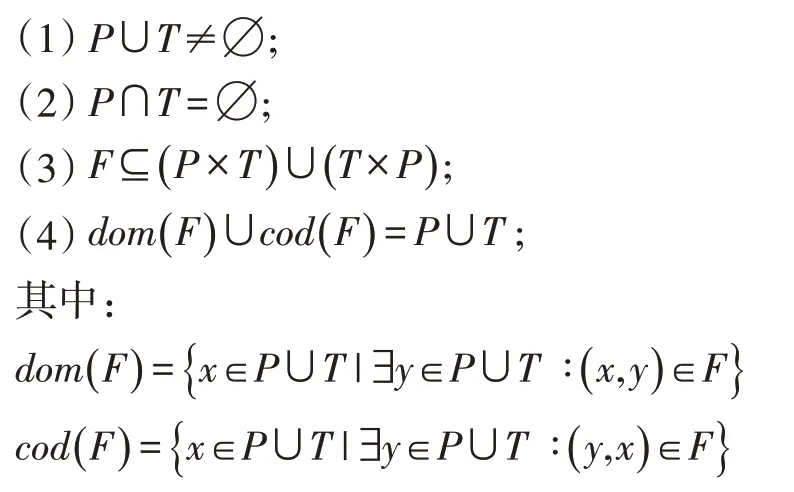
在上述定义的公式中,库所P 是一个非空的有限的集合,变迁T 也是一个非空的有限的集合,F 表示从库所指向变迁的所有有向弧和从变迁指向库所的所有有向弧的集合[4]。
dom(F)指的是从库所指向变迁的有向弧集合,cod(F)指的是从变迁指向库所的有向弧集合。
2 建模
2.1 时空模型介绍
我们将会构造一个以CPS 的物理实体为基础的时空特性事件模型,以具体应用场景的形式化分析来建立模型。分析系统中时空特性的变化和发生变化的原因,研究种种情况。从Petri 网的活性、可达性和安全性这3 个性质出发,全面验证在应用场景中时空模型的有效性[5]。
首先,接下来,我们需要做的就是建模。首先是要进行系统分析,确定对象活动的空间和时间,然后建立系统的模型并进行优化。
首先,Petri 网我们可以视为有向图。它的节点是位置和过渡。位置包含一定数量的令牌,过渡表示各种令牌的影响网络上的事件。弧的定义有点不寻常,假设每个消耗的令牌都有一个弧的生成[5]。当我们来到将不确定性区间与消耗的代币关联起来并生成。
2.2 时空模型的建模
为了更方便的说明Petri 网的时空模型,我们将会从Petri 网在V2V 技术这个具体的应用场景进行分析。V2V 是Vehicle to Vehicle 的缩写,表示的是车对车的通信技术。接下来是简单的车辆模型,只需要考虑单个车的情况。对汽车在道路的运行情况建立时空模型。如图2 所示。
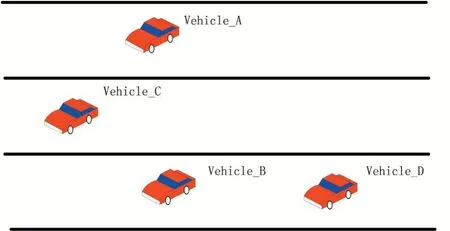
图2 汽车的行驶模型
首先,我们将为每一辆汽车都建立一个Vehicle 对象。很显然,汽车行驶的时空Petri 网模型将会比三元组更加复杂,它将会具备更多的属性。如下所示:
(1)车辆属性,将为每一辆汽车分配一个Vehi⁃cle_ID,该ID 就像人的身份证或者汽车的车架号,具有唯一性。
(2)相对位置,目前这一辆汽车和其他汽车的相对距离Distance 和它们的车道分布情况lane。
(3)速度特性,这一辆汽车的当前运行速度Velocity。
(4)驾驶操作,是车辆在道路上要进行的一系列操作Actions,包括加速accelerate(),减速decelerate(),换道lane_change(),匀速uniform_speed()。
因此在交通中的任意车辆的一个时空模型可以表示成:

考虑到在实践道路上将会拥有许多汽车共同运行,因此我们将会依次命名为Vehicle_A,Vehicle_B,
Vehicle_C,Vehicle_D。
举例,当Vehicle_B 希望进行超车的时候,由于Vehicle_D 在它的正前面。很显然它需要换到第二车道完成超车,但是Vehicle_C 又在该车道的左后方。那么这时候它必须考虑以下几点,
通过二者的Position 计算出Vehicle_B 和Vehi⁃cle_C 距离Distance,通过二者的Velocity 计算出Vehi⁃cle_B 的Vehicle_C 的相对速度。通过距离和相对速度可以得到留给Vehicle_B 的换道时间。如果时间不足以让它完成换道,那么将会危害Vehicle_C 的正常行驶。当然这仅仅只是简单的模型。
接下来我们将考虑更为复杂的情况,在一条高速公路上,汽车飞速的行驶,如果突然一辆汽车紧急刹车,这时公路的交通状况会急剧的恶化并且可能导致交通事故的产生[6]。
可是,如果有了V2V 技术,车辆在行驶过程中,能把车辆的行驶信息共享给别人。当一辆汽车突然急刹或者需要变道的时候,它能把自己的意图告诉别的汽车,这样就能避免事故的发生。当一辆汽车在车道需要换道时,它很显然也希望别的车能知道自己的想法意图,只需要稍稍减速为它的换道预留空间[7]。并且这种行为不会导致其他人的正常行驶受到过大的影响。
对于汽车的控制,信息间的交流,我们需要一个庞大的大数据平台,这就是时空大数据平台。当然这需要很多方面的配合,例如汽车企业、通讯企业和交通管理部门。汽车运行过程中的数据能够通过车联网技术传递到云计算中心。中心控制系统根据这些数据按照指定的数学模型计算出对应的安全距离,然后与两车的实时车距进行比较,然后反馈给汽车使司机或者汽车更加快速高效做出相应的控制操作[8]。当然在最后如果所有的汽车都能够实现自动驾驶,有一个控制中心来分配车道,决定车速,那么毫无疑问,道路的交通效率将会大大的提高。
3 结语
在本文中,我们提出了一种时空特性的定义方法,最为重要的是使用相对时间而不是绝对时间对时空Petri 网进行状态的标记和分析。我们提出了一种能够对所设计的时空Petri 网模型进行验证的理论方法,模型里面的库将会包括空间属性、时间属性以及数据属性,等等。这是对CPS 物理实体建模与验证方法的深入研究,它将会可以有效提高CPS 对我们进行研究的可信性,推动CPS 应用的普及[9]。
在将来,对满足相关时空模型的推理性问题的算法研究会作为我们的研究方向。此外,我们还将对时空逻辑进行更多的验证和提供支持工具。