基于嵌入式诊断系统的机车安全运行研究
2020-10-12焦静波
摘要 机车控制系统发展的当前阶段可以用所有过程的自动化来描述。但是,如果不使用集成到其组成中的信息测量系统,则不可能对控制系统进行时间敏感的适应,以适应铁轨的当前状态和机车本身。在这种情况下,配备有这种系统的每个机车不仅成为管理和控制的对象,而且还成为有关轨道状态的最新信息的来源。本文致力于通过考虑机车车辆和铁轨的状态,使用这种内置的诊断系统来解决确保机车安全和节能行驶的问题。考虑了选择速度模式以及确定嵌入式诊断系统中信息处理的组成,位置和基本原理的标准。
关键词:安全性能;诊断系统;缺陷性能;能源效率
中图分类号:TM76 文献标识码:A
Abstract The current stage of the development of locomotive control systems can be described by the ubiquitous automation of all processes. However, if the information measurement system integrated into its composition is not used, it is impossible to make a time-sensitive adaptation of the control system to the current state of the rail and the locomotive itself. In this case, each locomotive equipped with such a system not only becomes an object of management and control, but also becomes a source of the latest information about the state of the track. This article is dedicated to the use of this built-in diagnostic system to solve the problem of ensuring the safe and energy-saving driving of the locomotive by considering the status of rolling stock and railroad tracks. Considering the selection of speed mode and determining the composition, location and basics of information processing in the embedded diagnostic system Principle of the standard.
Keywords: Safety performance; diagnosis system; defect performance; energy efficiency
鐵路客运和货运领域的当前特征是交通流量的增加。这导致两个相互矛盾的问题:一方面,由于轨道和机车车辆上的负载增加,紧急危险增加;另一方面,由于交通密度的增加,找到用于监视轨道设施状况的时间表间隙变得更加困难。打破这种恶性循环的最有前途的方法之一是使用有机地集成到列车中的移动诊断系统。为了这些目的,最适合的当然是机车。同时,值得一提的是,现代铁路运输面临的另一个与交通集约化有关的问题:形式化不足和人为因素在机车领域的影响。结果,由于运动能量效率的降低,交通安全性降低并且运输成本增加。在这方面,旨在支持驾驶员并解决铁路运输运动的协调控制问题的方法和工具的开发相继产生。
1 铁路运行速度分析
1.1 计划运行速度
在世界不同国家,可能的铁路速度差异很大。 此外,一个国家的铁路网中既可以存在高速路段,也可以存在速度较慢的路段。运动速度与列车和铁轨本身的适应性有关,通常是针对给定的速度范围专门设计的。特别是对于高速运动,曲率半径小的弯道是不可接受的(由于在通过过程中作用在列车上的离心力太大)。在高速路段运行的火车也与低速路段根本不同。仅在明显的速度超过160 km/h时才完全表现出来的因素之一是空气阻力,根据列车的形状(主要是机车),影响运动质量的气流湍流有所不同[1-2]。
1.2 列车运行安全及限速
尽管不同的货运和客运列车可达到的速度有所不同,但所有这些都有共同的局限性。这些限制是由于需要确保沿当前状态的已开采轨道沿线运输的安全性。应该注意的是,铁轨不是静止的物体。随着时间的流逝,由于遭受的影响,它可能会严重改变其状况。
铁路的结构通常分为上下两部分。下部包括其基础床:路基和位于其底部的各种人工结构,如桥梁,管道,隧道等。从压载层及更高层开始的所有东西都属于上部结构,包括组装好的轨道和轨枕,铁轨的这些组成部分随时间的变化是由许多因素引起的,例如季节性温度波动会引起土壤的加热或冻结,以及铁轨的长度会发生变化;强烈的降雨导致水土流失;对沿途经过的火车的路径产生影响。
铁路发生的变化会使用专门的测量仪器进行定期监控。为此,实验用车和手动仪表在世界范围内得到使用。在相关标准中描述了铁路轨道状况的所有必需参数,这些标准既基于理论研究,又基于多年的铁路运营经验。他们为铁路的所有测量参数设置了边界,否则可能会发生紧急情况。应该注意的是,确保适当控制铁轨状况的最大问题与火车经过时的影响有关。铁路运输是运输旅客和货物的最具成本效益的方式之一。因此,世界上发展中国家的铁路上的交通量正在稳定增长[3-4]。由于铁路状态的许多变化与开采区的交通强度直接相关,因此在最流行的地区,这些参数的故障率最近已显着增加。例如,这些因素包括轨道缺陷的出现和发展。即使是现在,为了在密集操作区域中进行适当的控制,还需要使用实验车每两个月进行一次测量[5]。
应当注意的是,根据说明,这些不规则行为的性质会显着影响沿路径段的安全移动速度[6]。这是由于其一定程度的发展会导致事故。例如,如果在诸如波纹(波长为2.5-25.0cm的波状磨损)之类的参数中仅检测到超出1毫米,则速度限制为140 km/h。 如果在此段上进行修整(磨削)之前,该缺陷的深度达到3 mm,则将速度限制一直严格到40 km/h。在某些情况下(对于特别严重超出轨道维护标准的情况),轨道部分可能会完全关闭,直到进行维修为止。影响交通安全并因此限制可能的速度的另一个重要因素是机车本身的状况。
考虑到机车车辆状态的困难在于,首先,在维护过程中要对其进行控制。同时,机车旅执行的程序(通常归结为外部外观检查)具有最大的规律性。 大约每月一次进行更严格的维护:在这里可以使用专用设备(仪表,超声设备等)。例如,在一个月内,车轮缺陷的发展可能非常严重,因此在旅途中可能会出现问题。在这种情况下,限速的责任直接落在驾驶员身上,必须经常在缺乏数据测量信息时做出此决定。
2 机车运动的能效
机车的能效主要与其推进机械的运行有关。目前已经很好地描述了这种机器本身和许多其他系统的操作性质:存在具有不同程度的理想化和详细程度的数学模型[7]。在任何情況下,为了使火车运动,机车必须以一定的速度产生一定的推进力。那时,由于车轮与轨道的相互作用而产生了推进力,因此对其增加的限制是对牵引力的需求[8]。因此,最大可能的推进力取决于机车的重量及其机轮与钢轨之间的附着系数。该系数取决于许多因素。为了增加它,例如可以使用打磨。
对推进力的限制会导致两种主要的工作模式:
(1) 在一定速度下,推进力几乎不变(接近最大值),功率增加(加速过程);
(2) 在加速到高速后,功率变得恒定,并且推进力发生双曲线变化(机车的推进力与速度的乘积保持不变)。
为了确保推进性能接近理想,柴油机车上使用了各种类型的变速器(电动,液压,机械),用于将扭矩从发动机传递到机车车轮。带有电力传输的柴油机车显示最接近理想推进性能特征结果。考虑到相当快的加速,机车在平坦地形上的主要工作发生在恒定切向力区域。
鉴于以上所述,我们可以得出结论,以恒定速度接近其最大值的机车的运动是最节能的。因此,影响效率降低的因素是加速度和减速度以及高低的差异。应注意,加速度和制动可能与铁轨布局及其状态有关,出于安全原因,必须放慢速度。如果作为能效的标准,除了移动速度的值之外,我们还考虑了以稳定速度行驶的路段的数量,并根据该标准组织机车的移动,那么我们需要系统支持驾驶员选择运动模式。该系统应既包含从可用来源获得的轨道状况的先验信息(图纸位置,诊断行程的先前结果),也应包含来自机车及轨道诊断系统的信息。
3 集成式诊断系统
分配给诊断系统以集成到机车中的任务是:
(1) 监视机车的当前状态,并发出有关其系统和结构元件可能发生故障的信号;
(2) 监视列车经过的路段的当前状态;
(3) 在轨道部分识别列车的当前位置,并向驾驶员显示;
(4) 考虑有关行进路段状况的可用先验信息以及当前行程的诊断数据,以制定有关速度的措施。
应该说,许多机车系统的状态已经受到监视(驾驶员从测量设备获取的有关其状态的某些信息)。但是,应该注意的是,仅在以下情况下,才可以监测车轮对缺陷的发展(轴裂纹,轴箱部件,车轮),轴承滚动表面的磨削以及车轮滚动表面上的缺陷的出现保养。这意味着内置的诊断系统应提供在旅行期间监视上述因素的可能性,并监视在维护日期之间旅行的情况的发展。
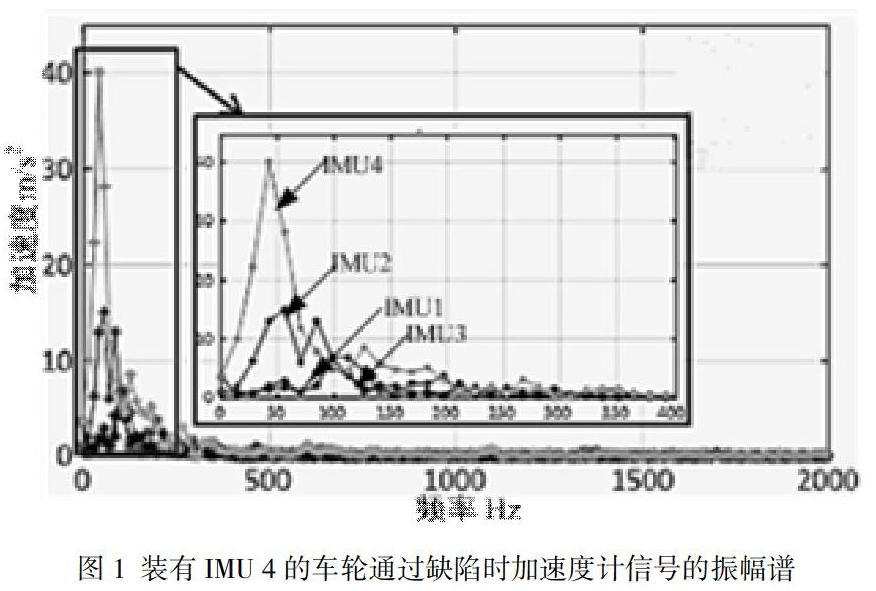
解决该问题的方法可能是控制机车转向架各个点的振动水平和频率,就像已经针对各种物体所进行的操作。在这种情况下,可能的手段之一是在关注点附近安装微机械加速度计。
图1显示了从此类传感器安装在汽车上时获得的信号频谱的大致视图。以下,作为实验结果,展示了作者开发的InerTrack铁路诊断系统的传感器数据。 图中所示的光谱是从微机械加速度计的读数中获得的,这些加速度计的测量轴为垂直方向,测量范围为±35g。这些加速度计作为惯性测量模块(IMU)的一部分,安装在汽车转向架之一的轴箱上。图中所示的振幅谱对应于安装了IMU1,IMU2,IMU3的车轮通过相对平坦的轨道部分(无接缝或缺陷)并且安装了IMU4的车轮沿轨道截面滚动的瞬间,轨道在滚动表面上包含缺陷。
确定铁轨通过部分的当前状态是一项极其困难的任务。当前,实验室车承担了这种诊断领域的主要负担。它们每个都包括大量复杂而昂贵的测量系统。 因此,不可能将机车转换成这种汽车的模拟物(就传感器的组成,受控参数的数量和准确性而言)。解决的方案如下:
(1) 仅监视变化最快的铁路参数(在使用专用设备的连续测量之间可能会发生重大变化);
(2) 使用低精度传感器,前提是它们安装在沿轨道的特定部分行驶的大量列车上(在这种情况下,可以通过回归分析获得相当准确的发展预测)。
轨道参数可以分为多个组,其中包括轨道的几何参数(轨距,曲率和垂直对齐,一个轨道相对于另一轨道的高程等)和轨道缺陷。反过来,钢轨缺陷又分为内部缺陷和表面缺陷。当前,使用磁力或超声波探伤仪(用于内部缺陷)来发现铁轨缺陷。这些系统对移动速度和安装位置有很大的限制,并且目前的形式无法安装在定期运行的火车上。同时,关于此类缺陷,当前的诊断措施允许保持路径的令人满意的状态。在监视轨道的表面缺陷的领域中出现了另一种情况。其中大多数是通过手动方式检测和测量的。但是,有研究提出了通过在车轮与轨道接触点附近安装惯性传感器来检测和测量它们的可能性。这样的系统既便宜又紧凑,这表明可以在本文提出的概念框架内使用它们。
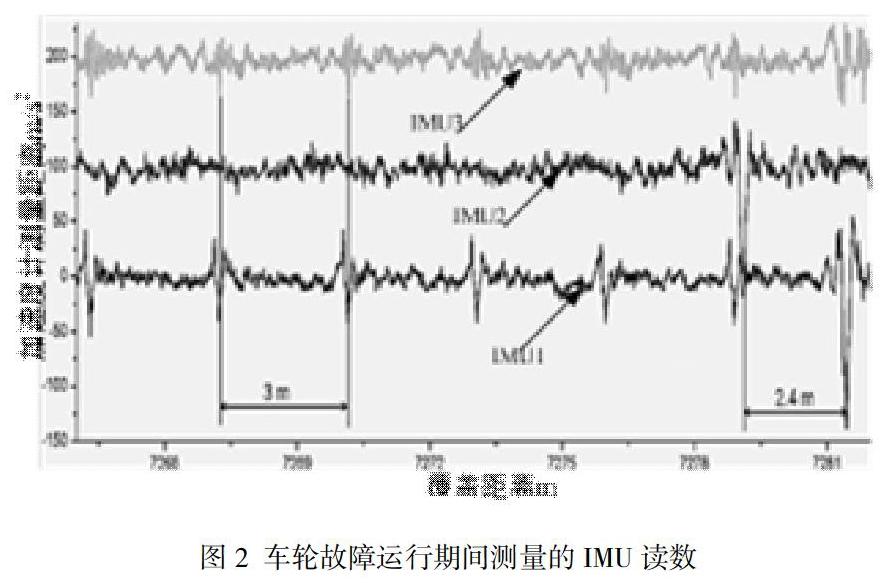
图2显示了在缺陷通过轧制表面期间从惯性传感器接收到的信号的近似形式。所示图表对应于InerTrack系统中包含的垂直加速度计的读数。当汽车从三个IMU以160 km/h的速度行驶时接收到信号:IMU1和IMU2安装在汽车的一侧(前轮上的IMU2),而IMU3安装在汽车的另一侧,在同一侧轮对作为IMU1。应注意IMU1和IMU2信号图中右侧脉冲的相似性质-它对应于滚动表面缺陷的通过(传感器信号的延迟是由于车轮之间的距离引起的)等于2.4 m。IMU1信号中周期性重复的脉冲(周期为3.0 m)也清晰可见。IMU3信号中存在相同的脉冲串,但不太明显。这些波动对应于安装了IMU1的车轮胎面表面上的不平整。显示了将传感器信号中的这两种爆裂原因分开的可能性,这使得可以同时诊断车轮和轨道的滚动表面状态。
当前,主要通过专用的轨道车来控制轨道的几何形状。现有的大多数解决方案都涉及使用捷联惯性导航系统(SINS)来测量这些参数,从而可以控制列车的运动和方向(通常与卫星导航系统集成以提高准确性),以及轨道头的光学扫描仪成对安装在列车的三个部分中。SINS本身和由一对扫描仪组成的每个测量部分的成本都很高。应该注意的是,当使用其他结构和算法解决方案时,有一种方法只允许使用一个测量部分。但是,避免使用SINS是很困难的。
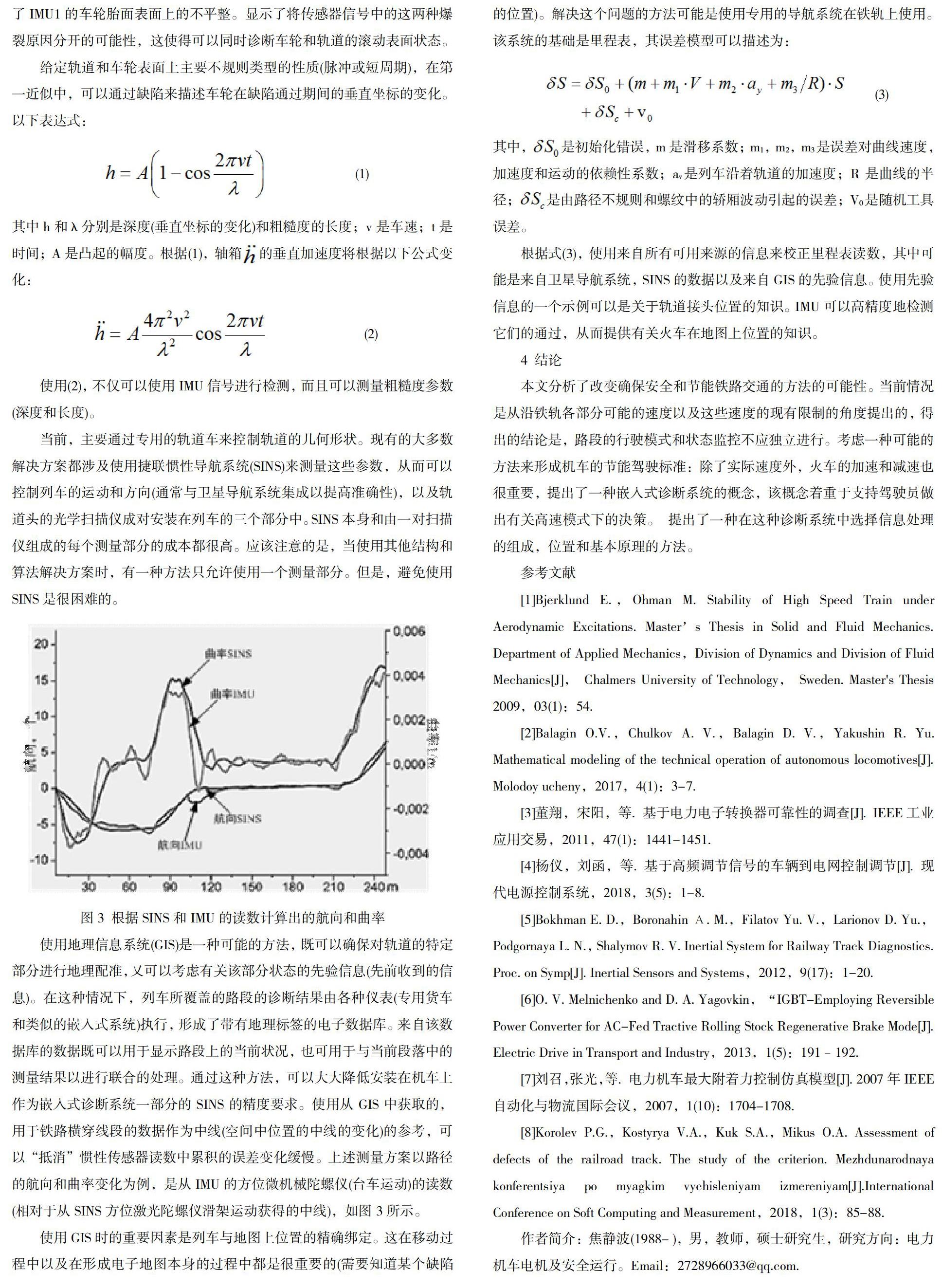
使用地理信息系统(GIS)是一种可能的方法,既可以确保对轨道的特定部分进行地理配准,又可以考虑有关该部分状态的先验信息(先前收到的信息)。在这种情况下,列车所覆盖的路段的诊断结果由各种仪表(专用货车和类似的嵌入式系统)执行,形成了带有地理标签的电子数据库。来自该数据库的数据既可以用于显示路段上的当前状况,也可用于与当前段落中的测量结果以进行联合的处理。通过这种方法,可以大大降低安装在机车上作为嵌入式诊断系统一部分的SINS的精度要求。使用从GIS中获取的,用于铁路横穿线段的数据作为中线(空间中位置的中线的变化)的参考,可以“抵消”惯性传感器读数中累积的误差变化缓慢。上述测量方案以路径的航向和曲率变化为例,是从IMU的方位微机械陀螺仪(台车运动)的读数(相对于从SINS方位激光陀螺仪滑架运动获得的中线),如图3所示。
使用GIS时的重要因素是列车与地图上位置的精确绑定。这在移动过程中以及在形成电子地图本身的过程中都是很重要的(需要知道某个缺陷的位置)。解决这个问题的方法可能是使用专用的导航系统在铁轨上使用。该系统的基础是里程表,其误差模型可以描述为:
根据式(3),使用来自所有可用来源的信息来校正里程表读数,其中可能是来自卫星导航系统,SINS的数据以及来自GIS的先验信息。使用先验信息的一个示例可以是关于轨道接头位置的知识。 IMU可以高精度地检测它们的通过,从而提供有关火车在地图上位置的知识。
4 结论
本文分析了改变确保安全和节能铁路交通的方法的可能性。当前情况是从沿铁轨各部分可能的速度以及这些速度的现有限制的角度提出的,得出的结论是,路段的行驶模式和状态监控不应独立进行。 考虑一种可能的方法来形成机车的节能驾驶标准:除了实际速度外,火车的加速和减速也很重要,提出了一种嵌入式诊断系统的概念,该概念着重于支持驾驶员做出有关高速模式下的决策。 提出了一种在这种诊断系统中选择信息处理的组成,位置和基本原理的方法。
参考文献
[1] Bjerklund E., Ohman M. Stability of High Speed Train under Aerodynamic Excitations. Masters Thesis in Solid and Fluid Mechanics. Department of Applied Mechanics, Division of Dynamics and Division of Fluid Mechanics[J], Chalmers University of Technology, Sweden. Master's Thesis 2009,03(1):54.
[2] Balagin O. V., Chulkov A. V., Balagin D. V., Yakushin R. Yu. Mathematical modeling of the technical operation of autonomous locomotives[J]. Molodoy ucheny, 2017, 4(1): 3-7.
[3] 董翔, 宋陽, 等. 基于电力电子转换器可靠性的调查[J]. IEEE工业应用交易, 2011, 47(1):1441-1451.
[4] 杨仪, 刘函, 等. 基于高频调节信号的车辆到电网控制调节[J]. 现代电源控制系统, 2018, 3(5):1-8.
[5] Bokhman E. D., Boronahin А. M., Filatov Yu. V., Larionov D. Yu., Podgornaya L. N., Shalymov R. V. Inertial System for Railway Track Diagnostics. Proc. on Symp[J]. Inertial Sensors and Systems, 2012, 9(17):1-20.
[6] O. V. Melnichenko and D. A. Yagovkin, “IGBT-Employing Reversible Power Converter for AC-Fed Tractive Rolling Stock Regenerative Brake Mode[J]. Electric Drive in Transport and Industry,2013,1(5):191–192.
[7] 刘召, 张光, 等. 电力机车最大附着力控制仿真模型[J]. 2007年IEEE自动化与物流国际会议, 2007, 1(10):1704-1708.
[8] Korolev P.G., Kostyrya V.A., Kuk S.A., Mikus O.A. Assessment of defects of the railroad track. The study of the criterion. Mezhdunarodnaya konferentsiya po myagkim vychisleniyam izmereniyam[J].International Conference on Soft Computing and Measurement, 2018, 1(3):85-88.
作者简介:焦静波(1988- ),男,教师,硕士研究生,研究方向:电力机车电机及安全运行。Email:2728966033@qq.com.
