基于正交雷达的无人机导线自主跟踪技术研究
2020-10-09徐勇明袁林峰李飞伟范根法刘庆生马学裕
徐勇明,袁林峰,柯 达,李飞伟,范根法,刘庆生,马学裕
(国网浙江嘉善县供电有限公司,浙江 嘉兴 314000)
0 引言
近年来,无人机巡检逐渐成为电力巡检中主要巡检手段[1-2],通过无人机搭载高像素相机来拍摄输电线路通道中的图像作为巡检内容,但输电线路通道中环境复杂,多数在山林中[3-5],巡检人员远程控制无人机只能通过相机狭窄视角来观察周围环境,容易导致无人机撞击物体坠毁[6]。因此,自主的无人机巡检系统将成为巡检技术发展方向。
无人机自主飞行系统应该包括测距模型、控制算法和数据链路闭环。在国内外研究中,吕明等[7]在已知UAV当前位置以及巡检线路中杆塔GPS信息的前提下,利用由GPS信息快速计算两点间距离的算法和地理坐标系转换来对无人机自主控制;测距方面,Menendez等[8]使用边缘增强和霍夫变换检测图像中的平行线对电力线提取,以当前图像与参考图像中平行导线间隙的变化估算当前导线与镜头的距离,另外,在提取电力线算法中进一步地使用高斯滤波及 Gabor 背景滤除,并融合惯性导航数据对距离进行估算[9];Araar等[10]提出基于视觉的伺服系统,通过PID控制原理对无人机与输电导线相对位置关系测距进行控制,实现无人机自主飞行;王亚先等[11]提出单目视觉测量无人机距离输电导线的水平距离和垂直距离,来实现无人机在一定规则下的自动飞行和相机追踪导线;祝琨等[12-13]采用双目立体匹配的方法估计相机与物体之间的距离;Valipour等[14]提出一种基于高斯可控滤波器与概率霍夫线变换结合的导线检测方法,并使用无迹卡尔曼滤波进行导线跟踪;Nasseri等[15]提出一种基于粒子滤波的无人机航拍电力线检测和跟踪方法;基于深度学习方面,有人将无人机置于导线侧面区域飞行,在简单背景下进行导线提取,计算导线的消逝点(vanishing point,VP),设计了一种基于深度学习技术的铁塔检测网络 Tower RCNN[16],结合VP与铁塔检测结果确定无人机飞行航向[17]; 文献[18]利用透视原理恢复输电线之间的平行结构,通过计算当前帧与参考帧之间导线间隙变化与导线束相平面位移,反推无人机与导线间的距离变化,从而控制导线与机体的安全距离。
但基于视觉的测距方案在巡检时对光线要求严格,而际场景中环境复杂多变,故此方法难以在实际场景使用。为此,可采用激光雷达进行测距,使无人机的实时控制有更强的鲁棒性[19]。
本文针对以上研究优缺点,提出以正交雷达为测距传感器,在多变环境中测距精度鲁棒性强,在这基础上建立无人机导线跟踪飞行模型,以PID控制算法实现无人机控制,并且为了实现全线路自动巡检,提出基于激光点云位置和塔头特性来识别塔头,实现自动跨塔。在无人机、正交雷达和地面站的数据链路中形成闭环,使得数据得以传输,实现实时有效的无人机导线跟踪飞行。
1 正交雷达测距模型
正交雷达的具体参数如表1所示。
正交雷达扫描点处于一平面,其坐标系如图1所示。无人机距离导线10 m认为是安全距离,这是因为按照该正交雷达参数中的角度分辨率,雷达能够扫描0.034 m宽度的物体,此时精细导线的半径足以被扫描到。
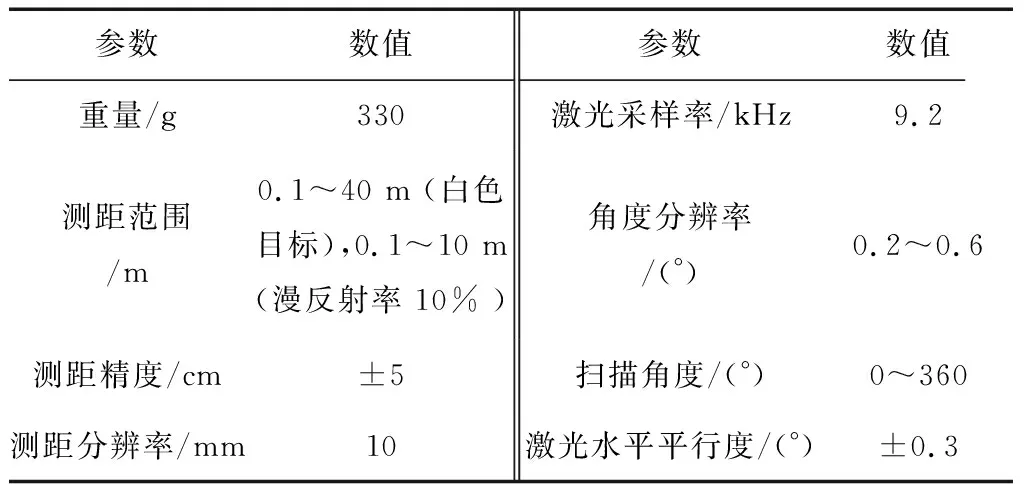
表1 正交雷达具体参数

图1 雷达坐标系
正交雷达在输电线路通道上方测距模型如图2所示。在图2中,正交雷达激光旋转1圈就计为1个测量周期t。

图2 正交雷达的测距模型
在测距模型中,无人机在导线的正上空,在俯视角如图3所示。图3中,DLF、DLB、DRF、DRB分别为无人机左前方、左后方、右前方、右后方距离导线的距离。

图3 无人机可跟踪巡检姿态俯视图
令EFB=|DLB-DLF|,ELR=|DLF-DRF|;并设β为航道姿态调整的前后测距误差阈值;α为航向姿态调整的左右测距误差阈值。
当EFB≤β,ELR≤α时,认为无人机处于可巡检跟踪姿态,此时无人机可以开始以一定巡检速度v向前飞行。
当EFB>β,ELR>α时,如图4所示,认为无人机处于航向调整姿态,此时无人机应进行航向角调整,其误差量为Eangle。
(1)

图4 无人机航向调整姿态俯视图
当EFB≤β,ELR>α时,如图5所示,认为无人机处于航道调整姿态,此时无人机应进行水平左右位置平移调整,其误差量为Ed。
(2)
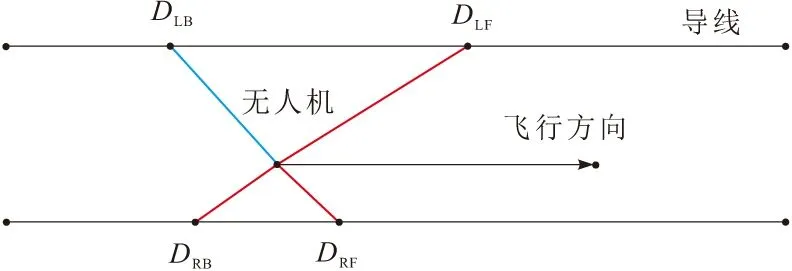
图5 无人机航道调整姿态俯视图
无人机跟踪控制过程如图6所示,形成控制闭环。
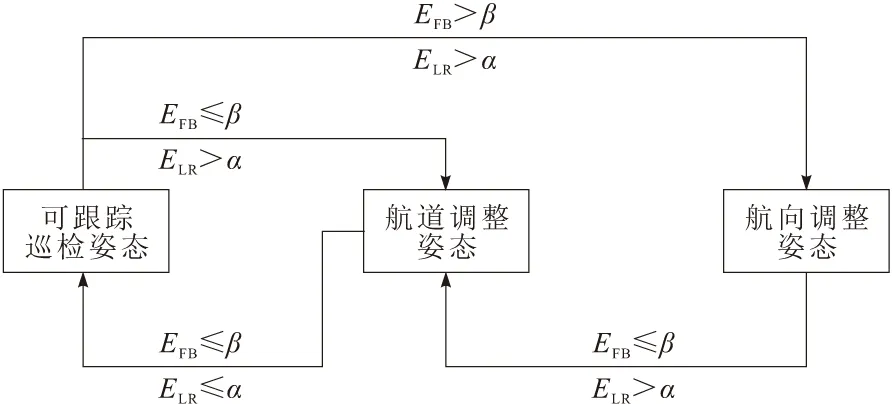
图6 控制流程
2 跨塔算法
无人机巡检过程需要跨越转角塔来实现全线路的自动巡检,那么就需要无人机在导线跟踪飞行过程中,识别前方为塔头后进入跨塔飞行状态。
首先需要对塔头识别,其算法为根据塔头的点云位置特征进行识别。当无人机和正交雷达以本文的测距模型飞行时,在无人机左前方和右前方的激光点云位置会呈现如图7所示的情况。
定义左前方方向采集到的点云数据集合为SLF,其中集合的点云数据为P(y,z),右前方方向采集到的点云数据集合为SRF,其中集合的点云数据为P(x,z);NSLF,NSRF分别为集合SLF、SRF的点云数量;HLF、HRF为点云集合SLF、SRF中点云在Z轴方向的最大距离;η为识别塔头时左前激光扫描的点云在Z轴方向的阈值;ι为识别塔头时右前激光扫描的点云在Z轴方向的阈值;κ为识别塔头时左前激光扫描的点云数量阈值;λ为识别塔头时右前激光扫描的点云数量阈值。则有:

图7 正交雷达扫描塔头点云示意
(3)
(4)
当HLF<η、HRF<ι、NSLF>κ、NSRF>λ时,认为无人机进入跨塔飞行状态,按照当前飞行方向前进,再进入跟踪姿态调整状态,继续跟踪飞行,过程如图8所示。

图8 无人机跨塔飞行过程
3 无人机自主控制算法
根据PID控制原理,PID算法为
(5)
u(t)为被控制量;e(t)为实际输出值和期望输出值之间误差;KP为比例系数;KI为积分系数;KD为微分系数。其中,KP是直接影响到实际控制效果的,在合理的数值范围内KP越大,控制效果越好,越短时间回到期望值,但也容易导致抖动,无法稳定于期望值;KD影响的是控制量向期望值靠近时的加速度,即使得靠近期望值的过程相对平滑;而只有KD控制会导致控制量一直与期望保持一个恒量差值,KI是来抵消这个恒量的。
将上述航向角误差Eangle和航道偏移误差Ed作为PID控制算法的控制量,具体控制流如图9所示。

图9 PID控制流程
4 无人机跟踪系统架构
为了实现飞行跟踪系统数据链路的闭环,利用无线传输方式,将正交雷达扫描的点云数据发送给地面站,地面站通过蓝牙与控制端通信,在控制端实现算法控制,并将控制指令发送给无人机进行控制,架构如图10所示。
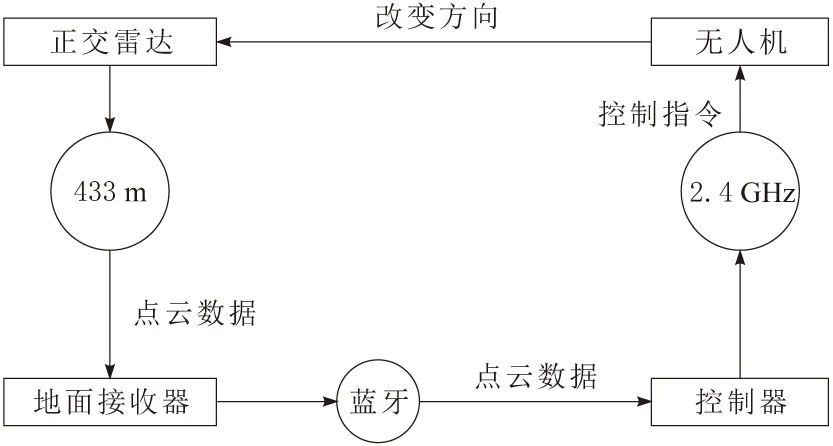
图10 无人机跟踪系统数据传输架构
5 实验分析与结果
5.1 实验条件
在实验中,在某双回路的线路中进行测试,无人机采用DJI的御2,参数β=0.1、α=0.1、η=7 m、ι=7 m、κ=50、λ=50。实验内容为测试无人机跟踪姿态调整的稳定性,以及测试无人机过塔继续跟踪的成功率。在稳定性测试中,当飞手将搭载正交雷达的无人机飞行至导线上空并发送自动巡线指令后,无人机接收指令开始进行跟踪姿态调整,并记录跟踪飞行过程中航向角的变化和水平左右速度变化。
5.2 实验结果分析
无人机在自动巡检中,航向角变化趋势和水平速度变化趋势如图11所示。
在实际测试中,线路一共有53座基塔。在跟踪飞行中,当无人机1组电池电量耗完时则计为1次巡检。全条线路飞行测试完成后,所得数据如表2所示,其中,平均跨塔成功率为96%。
从实验结果可以看出,基于正交雷达的无人机导线跟踪飞行算法在跟踪过程中的调整过程是稳定可控可行的。在跨塔飞行中,容易导致失败的情况都为转角塔且其转向角度较大,雷达扫描点云丢失了导线信息,但这种情况实际数量很少,并且丢失导线跟踪后可以通过切换回手动模式,再进行手动校正。

图11 航向角变化趋势和水平速度变化趋势

表2 巡检过程跨塔数据
6 结束语
提出了基于自触发原理的脉冲式正交雷达在输电线路上的测距模型,利用PID控制无人机实现精细导线跟踪,并且在实际场景中测试其跟踪飞行过程的稳定性和可行性。为了进一步地加强全自动流程,加入跨塔算法,在大部分情况下都能实现跨塔飞行继续进行导线跟踪飞行。本方法提高了巡检效率,为无人机电力巡检自动化提供新的思路。
