基于二进制粒子群算法的植保无人机跟踪
2020-09-29刘云潺
刘云潺,高 聪
(黄河水利职业技术学院,河南 开封 475004)
0 引言
随着航空技术的发展,逐渐在农业植保方面进行无人机操作。植保无人机具有操作稳定、不会产生漂移现象、在空中可长时间悬停优点,提高农作物病虫害防治水平,同时也可以大面积、短时间内增强农业抗风险能力,为智慧农业可持续发展提供了强有力的支持[1]。
跟踪测量植保无人机的方法在硬件方面采用惯性传感器(Inertial Measurement Unit,IMU),但是这种传感器价格较高,不利于无人机在农业工程方面的实际推广,若直接购买商用IMU,成本更高。目前主要是通过对无人机算法方面进行研究来达到实时跟踪,算法主要有:Danelljan[2]通过生成模型方法提升训练跟踪样本的多样化,目标函数进行了完善和改进,减轻了形变情况对性能的影响,但计算过程复杂,跟踪速率较低。Zuo和Wang[3]基于神经网络和反步控制技术提出了一种考虑输出约束的自适应轨迹跟踪控制方法。传统通过调制特征提取来分析信号的特征,但是需要先补偿机身分量[4],对信号特征的参数估计获得调制线频谱、调制周期等主要参数,通常利用多个调制周期的长停留时间以确保参数估计的准确性,考虑到实际的时效性,一般不采用该方法。Srinvias[5]等人提出自适应遗传算法(Adaptive Genetic Algorithm,AGA),在遗传算法的基础上通过自适应调整来满足无人机的跟踪需求,同时该方法比标准粒子群算法在处理时间方面有了显著性提高,但是在算法后期由于遗传特性的限制更容易陷入局部最优;Jain[6]利用某些非线性函数的特性,通过粒子交叉以及变异机制对粒子群算法优化,但是交叉以及变异机制没有通过多个函数控制,使得进化的随机性无法满足,在粒子早熟现象控制方面仍然不足。
本文在粒子群算法的基础上,提出二进制粒子群算法,对粒子位置进行编码,同时利用sigmoid函数优化粒子群,从而避免了粒子群早熟现象的发生,仿真实验验证了本文方法对植保无人机跟踪的有效性。
1 二进制粒子群优化算法描述

(1)



(2)
为防止Sigmoid函数饱和,可以将粒子的速度设定在一定范围内[-Vmax,Vmax]。在本文中,令Vmax=3,对应的Sigmoid函数修改为:
(3)
2 基于二进制粒子群算法的植保无人机跟踪
2.1 植保无人机目标机动模型
当地面控制与植保无人机相离较远时,跟踪预警系统启动,地面控制利用被动传感器对目标运动方向进行测量[13-14]。设地面控制初始位置为(xo,yo,zo),植保无人机目标在t1时刻的位置为(x1,y1,z1),做匀速直线运动v,运动方向的单位向量为L=(l,m,n)T,其中,l=cosαsinβ,m=cosαcosβ,α表示目标航迹方向的俯仰角,β表示植保无人机航迹方向的方位角[11-12]。在ti时刻空间目标的位置为(xi,yi,zi),地面2.4 GHz的无线电波装置测量到植保无人机目标方向上的单位向量为L=(li,mi,ni),跟踪植保无人机目标与红外装置的距离为Ri,则植保无人机运动模型为:
(4)
2.2 观测模型
空中植保无人机目标由位置和速度组成,其状态转移矩阵F(w)、干扰转移矩阵G和观测矩阵H分别为:
(5)
(6)
(7)
状态噪声协方差矩阵为:
Q=
(8)
ω趋近于0时目标做近似直线运动,ω>0时目标做角速度为ω的左转弯运动,ω<0时目标做角速度为ω的右转弯运动。
这时,空中植保无人机目标机动观测得到:
(xi,yi,zi)′=(xi,yi,zi)+σ·ξ,
(9)
式中,σ为目标航向均方差;ξ为(0,1)之间的正态分布随机数。
构造参量加权最小二乘目标函数对目标测量估计为:
(10)
使Q最小的航迹方向即为估计方向。
2.3 二进制粒子群算法对植保无人机跟踪实现过程
设二进制粒子群停止迭代收敛的条件为:
|(xi,yi,zi)′-(xi,yi,zi)|≤ε,
ε越小,迭代次数越多[15-16],本文仿真取0.01。
算法过程为:
① 参数设置,确定植保无人机空间三维变量,并随机初始化种群中各粒子的位置和速度;
② 评价各粒子的适应度函数,记录局部最优个体和全局最优个体;
③ 根据式(1)更新粒子的速度和位置;
④ 通过Sigmoid函数对粒子速度和位置修正;
⑤ 计算跟踪数据ε,若满足条件则停止迭代,转至步骤⑥,否则转至步骤②;
⑥ 输出跟踪轨迹。
3 实验仿真
在目标跟踪的计算机仿真中,二进制粒子群算法的参数选取如下:粒子更新速率为vmax=1 200,c1=c2=2,w∈[0.4,0.9],粒子群的种群大小为50,总的迭代次数为300。植保无人机参数为:初始位置 (20 m,30 m) ,初始速率:5 m/s ,初始速度方向:2.45 rad,测量标准差:0.5 m ,采样周期:0.5 s。不同算法跟踪结果如图1~图6所示。
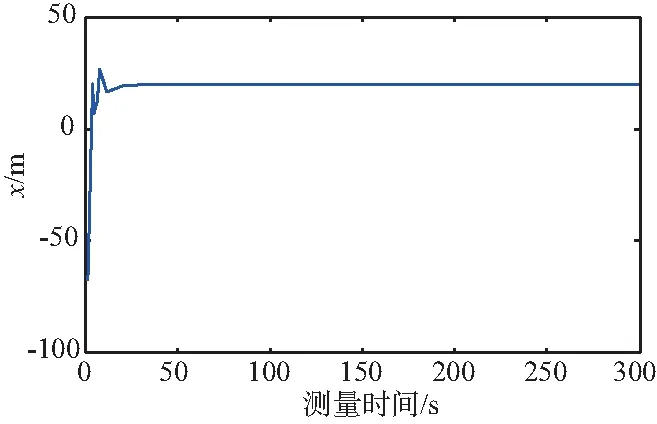
图1 PSO算法x方向跟踪结果
图1~图6分别给出了各个方向上的跟踪值,可以看出,BPSO算法比PSO算法的波动较小,且趋于稳定时间较短。在x方向跟踪测量对比显示,图2为本文BPSO算法x方向跟踪测量误差稳定在15 m,而图1为PSO算法x方向跟踪测量误差稳定在20 m;在y方向跟踪测量对比显示,图4为本文BPSO算法y方向跟踪测量误差稳定在15 m,而图3为PSO算法y方向跟踪测量误差稳定在18 m;在z方向跟踪测量对比显示,图6为本文BPSO算法z方向跟踪测量误差稳定在16 m,而图5为PSO算法z方向跟踪测量误差稳定在18 m;因此BPSO算法跟踪效果明显较好。

图2 BPSO算法x方向跟踪结果
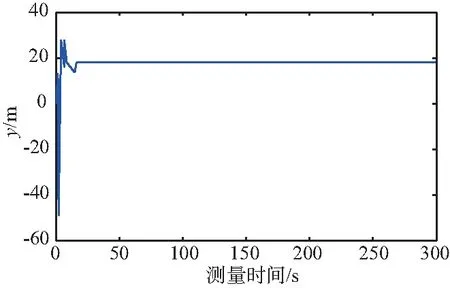
图3 PSO算法y方向跟踪结果
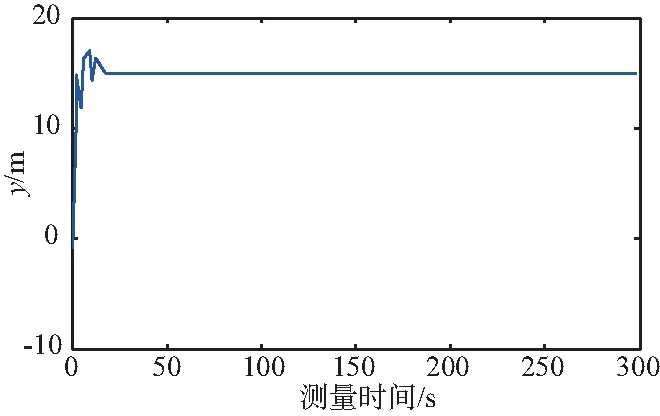
图4 BPSO算法y方向跟踪结果
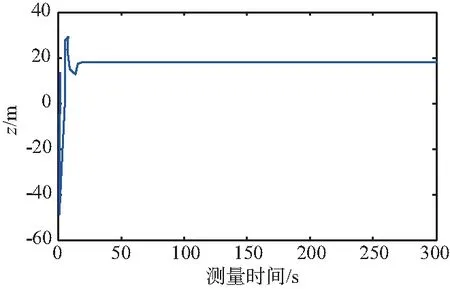
图5 PSO算法z方向跟踪结果
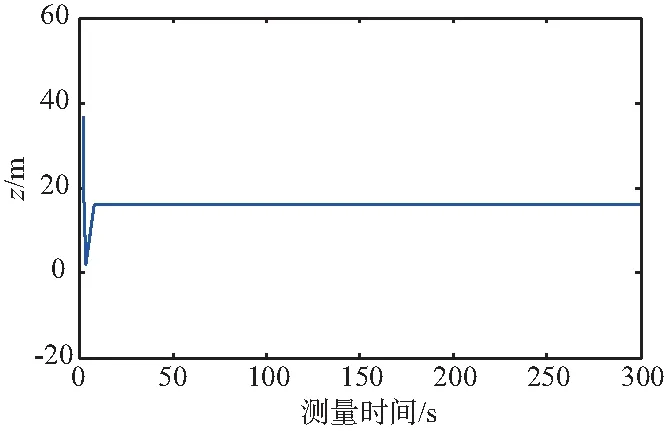
图6 BPSO算法z方向跟踪结果
为了评价跟踪效果,选取虚警率作为指标,跟踪虚警率如表1所示。

表1 跟踪虚警率
由表1的跟踪虚警率中可以看出,本文BPSO跟踪虚警率最小,这样在跟踪过程中产生的误跟踪较少,这是因为二进制粒子群通过Sigmoid函数将粒子的位置和速度进行不断的修正,使数据寻优找到真实解的概率较大。
4 结束语
本文提出了一种基于二进制粒子群算法的植保无人机跟踪模型,通过Sigmoid函数优化的粒子群可以方便、准确跟踪植保无人机。实验仿真结果显示,本文BPSO算法在x,y,z方向跟踪误差值小于PSO算法,因此该方法具有一定的优越性和可行性,为无人机应用在智能农业发展提供了一种新的思路。
