自主化无人装备改变城市作战
2020-09-28苏卜显范会兵罗倩邢磊
苏卜显 范会兵 罗倩 邢磊


自主化无人装备在城市作战应用示意图
城市作战与自主化无人装备
部队在城市中作战面临着许多严峻的挑战,诸如建筑物或狭小空间内的搜索、清剿会将士兵置于极度危险之中;守卫、防御等任务会耗费大量人力,同时又要被动地应对敌军有组织的进攻;城市街道相对狭窄并且建筑设施众多,队伍行进中面临着各个方向的威胁;楼宇密集的城市环境会导致通信困难,态势感知受阻;建筑被破坏摧毁后,掉落的钢筋石块会成为部队机动的障碍;敌人在地下隧道中通畅的机动与支援,使己方收到严重威胁等等。
常规作战部队面对这些情况可能会非常棘手,而自主化无人装备完成这些任务则具有更佳的技术优势以及更高的经济性。物联网、传感器、数据传输和云计算等技术的应用,GPS拒止环境下作战、电子战等作战能力的不断增强,反劫持技术等领域的不断发展,都将使得未来无人装备自主化作战成为可能。
随着城市作战逐渐成为现代战争的主要形式之一,更多的自主化无人装备将会投入城市战场。城市中的区域封锁、值守防卫、快速机动以及反恐维稳等作战行动亟需开发新的作战方式,而无人机/无人地面车辆等装备投入战场,能够从更多方面影响甚至改变城市作战。比如将无人装备与心理战结合,在研究人的个体心理和群体行为心理的基础上,利用无人装备在心理与思想上潜移默化地影响当地群众,将有助于应对城市作战中许多难题,可能决定未来战争的结果。并且使用无人装备不但可以减轻附带的损害,还会节省更多资源。
基于无人化装备的作战概念创新将影响新型无人装备的设计和研发,并推进更先进的战术、技术和作战方式的出现。人机协同将驱动新技术的研究,比如虚拟现实以及增强现实等新技术已经可以用于平台的远程操作。
随着技术的持续发展以及更多新技术的不断应用,日益自主化的无人作战系统将广泛应用于城市作战。

美军作战训练——依靠烟雾掩蔽作战
城市中可能执行的作战任务
城市战场环境会大幅减弱许多技术上的优势。以美军为例,由于其在开放区域占据着作战主导地位,敌方逐渐将城市作为对抗美军的主要战场,而在城市中作战会面对许多无法回避的难题,比如通信感知受阻、士兵密集不易快速分散等,使得部队时常处于危险之中。采用传统的作战手段来占领城市变得越来越困难,除非大幅增加高科技的投入取代人力,这就需要新的作战技术和理论来应对这种情况。而自主化无人装备能够依靠自身优势有效应对城市中的许多难题。
下面将例举城市战场中的若干作战场景,设想自主化无人装备的应用方式,来表明其不仅可以减轻步兵分队城市作战的负担,还可以创新城市作战方式。
进攻作战
清剿建筑物 执行清剿任务是非常危险的,狭小的房间内随时可能发现敌人或是爆炸物,精确打击及感知等技术优势会被抵消。清剿行动必须出其不意、迅速并以有限的武力来进行。任务小队悄悄接近,按顺序迅速攻入房间,同时以最大限度的火力覆盖,防止伤及平民,并避免己方伤亡,随后敌军被解除武装,伤员接受治疗,在房间中搜寻有价值的情报等,至此完成房间清剿。
我们设想一下清剿任务中可能遇到的场景。这是一幢两层的建筑物,敌军可能分散在多个房间内,屋内可能设置有爆炸物等陷阱。建筑物内空间狭小,视线不佳,且不能排除有平民在建筑物内。执行任务的作战人员布局密集,需要快速机动穿过房间、楼道。以美军为例,清剿常规两层的建筑物,时间约为10分钟或更多。

美军作战训练——密集阵形进入建筑物
而自主化无人装备执行清剿任务,可以设想的应用方式如下:情报、监视和侦察(ISR)机器人用来侦察定位房间内的人员,降低了突击队的风险;这些机器人还可以执行破门、为突击队殿后以及守卫楼梯等任务;可以利用配备非杀伤武器的无人装备自主进行房间清剿。即使是在布满瓦砾的不平坦的地面上,这些先进的机器人也能够独立地移动以完成任务,它们还能检测门上是否有饵雷,或者扫描房间里是否有爆炸物等危险品。在高级战术中,可以让机器人封锁整層楼,而突击队则到最重要的房间进行战斗。
攻入建筑物 在传统作战中,攻入建筑物至少需要6个关键步骤,即行动前规划抵达建筑物的行进路线;形成作战流程;在抵达目标建筑的路上,其他支援小队为主力突击队提供掩护;制造攻入点;攻入点生成后,支援小队提供压制火力,主力突击队攻入;阻断附近的街道来隔离目标建筑。
行动过程中通常会利用烟雾来保护主力突击队,平民、敌方战俘和伤员的处置由支援小队负责。

美军作战训练——在屋顶观察周围情况
而自主化无人装备在任务中能够自主解决许多问题,它们的介入能为部队提供许多便捷。比如在战前规划中,人工智能系统会根据实时情报自动规划路线,并且会根据士兵与机器的协同情况以及指挥官的命令而动态变化;作战中,支援小队将拥有先进的态势感知能力,侦察无人机可以在周围自主飞行及悬停;人在环的压制火力能够掩護突击队,并可引导火力打击敌军阵地,如果该地区有许多平民,则使用非杀伤性武器;可以利用无人车将平民和伤亡者带离交战区域。
自主化装备参与攻入任务可分为以下三个阶段:第一阶段为利用无人装备为突击队提供非杀伤性打击以及人在环的火力压制;第二阶段为利用无人装备侦察建筑物内情况,并可进行无人爆破;第三阶段可在最少士兵介入的情况下由无人装备群伴随迅速完成攻入任务。
驻守建筑物 设想部队执行驻守任务场景。在大部队抵达或占领街区前,人员要确保建筑物在己方控制下(大约72小时至1周)。建筑物周围会有平民。面对的敌方人员包括敌方部队、反抗军、劫匪等。天气情况复杂多样。我方部队除留守建筑物外,还需要士兵去警戒附近街区。多数情况下,负责清剿的部队在完成任务后将迅速离开并去执行下一项任务,此时建筑物没有足够的防御能力去抵御敌军的反攻。如果留下部队驻守,则需要更多的士兵去防御附近更大范围的街区。
而驻守建筑物,更能够体现无人装备的作战优势,哨兵机器人和传感器能很好地应对上述情形。作战部队离开后,机器人可以执行驻守任务,抵御敌军。

美军作战训练——人机协同进入建筑物内
随着哨兵机器人投入战场执行驻守任务,更多的主力作战部队能够得到解放,并能更加迅速地投入城市其他战场完成更多的任务。随队的自主哨兵机器人不仅能使突击队更快地完成清剿,还能有效抵御反攻的敌军。许多先进技术不断应用在越来越小的机器人和传感器上,比如太阳能供电等,使这些机器人可用于地下、建筑物内的态势感知和监控,持续值守72小时至1周,甚至更长时间。
机动作战 部队在楼宇密集的城市道路上行进同样面临很多危险,尤其是在大型城市中,城市环境会抵消通信通联、快速机动等许多技术上的优势。在行进中,部队可能会被炸弹、火箭弹袭击或被设置好的障碍物引导到敌军埋伏点被伏击。同时,城市中许多平民的存在也会使战场情况更加复杂。
设想一下机动任务场景。部队受领任务,步行或乘坐载具机动至另一地点。敌军方面具备情报、监视和侦察能力,正在查找我军物资、控制区域、地雷陷阱布置情况等。面临的环境情况是:天气多样;密集市区,街道上布满车辆或瓦砾;平民可能聚集;建筑物遮挡视线。在城市中机动的速度通常慢于在开阔地带。此外,众多平民会出现在城市各处,妨碍作战行动,需要做大量识别平民与武装力量的工作。
行动中,部队穿过一个城市区域时要采取以下措施:利用地形掩护行动;避免经过可能的交火区域;分散行进,避免被集中压制;观察监视周围情况,尽可能不被发现。
而在复杂的城市战场环境下,大量的无人装备可实施机动保障:它们可以拦住行人及车辆,保障部队顺利行进;指挥官可以利用自主侦察的无人系统采集重点区域的日常交通情况,在行动过程中,派无人装备基于采集的交通云数据进行实时的交通疏导工作;也可以利用它们清除路障、开通道路,或者在特定区域设置路障阻碍敌人。

城市环境下人机协同作战场景
对无人装备可以提出以下应用需求:以轻小型地面无人装备为主;机动能力强,可以作为移动目标干扰敌军,分散那些攻击有人车辆的敌人的注意力(比如美军Ripsaw无人坦克,可以作为诱饵,引诱敌军开火射击,然后部队实施打击);具备行进中实时侦察的能力,且噪声低等。
无人装备在机动中可以发挥多种用途。部队可以将它们作为更佳的监视侦察装备,必要时也能成为交战先锋,并能将非战斗人员带离战场。无人装备可以深入战场进行实时侦察或人在环的反击,那些廉价的轻型无人装备(比如自杀式的)可以引诱敌军暴露其位置,也可作为先锋或后卫兵来预警,增强部队的态势感知能力。具备夜视及其他感知能力的无人装备能够提高部队在夜间的作战能力。烟幕机器人可以围绕战场机动,尽可能使烟雾覆盖更大范围,以掩护部队行动。
围剿行动 围剿敌军部队是作战中的一项常规任务。通常来说,任务关键是切断敌军的支援,然后在包围圈内消灭敌人,敌军将四面受敌,被迫战斗或投降。现代战争中的一个例子是美军入侵阿富汗时,在托拉博拉试图抓捕本·拉登的行动。当时基地组织的极端分子藏匿在托拉博拉山区,美国军队认为本·拉登也在其中,因此调集特种部队集中打击却屡屡失利。实际上美军行动时,本·拉登已经逃到了巴基斯坦。

无人车可提供物资补给
如果在围剿任务中使用自主无人装备,那么可以在包围敌军阵地的任务中投入更少人力。比如,包围圈的一侧可以布置很多无人装备作为屏障,士兵一侧不断压缩包围圈,人与无人装备形成战术协同态势,攻击被包围的敌人,效率更高、伤亡更少。
伏击行动 执行伏击战术时,要保证整个战场被火力覆盖,确保路障及封锁火力将敌军控制在战场区域内。行动中,我方主力部队要在障碍物后方寻找掩护,支援部队要保持安全距离并力图打散敌军阵形,将他们各自孤立。在第一波攻势后,主力部队进入战场解决残余敌军。伏击时机的把握至关重要,要出其不意,从而最大化地发挥战术效果。在紧急执行一项伏击任务时,作战小队应寻找合适的埋伏位置(视野开阔、便于射击),等待队长指令进行作战。
同时,自主或半自主无人装备也可以作为破障装备使用,用来打破墙壁或障碍物。机载传感器将能够感知破障位置,并调用装备进行操作,以最快的方式突破障碍。另外,自主无人装备还可以用来排除地雷等危险品,通过传感器扫描地雷位置并规划行进路线,随后自动将地雷排除。
灾难援助与反恐维稳
灾难援助 灾难援助是极其耗费人力又十分危险的行动。执行此类任务,小型无人机可以投入进来用于搜救;携行能力强的机器人有助于地震后的碎片搜索和清除工作;自主沙袋机器人可以用来填充和放置沙袋以阻挡洪水。自主机器人还可在生物、化学、放射性、核辐射等危险环境下使用,代替人员执行任务。
反恐维稳 人机混编小队会催生反恐维稳的新战术,许多公司已经着手研究这类装备,比如携带驱散装备的无人机。而一些更先进的无人车陆续诞生,可以用来封锁区域并驱散暴徒。

有机器人警戒,士兵可以安心瞄准目标,人机协同带来作战效能的提高

要认清自主化机器人是一把双刃剑,不要忽视智能化带来的挑战与未知。图为2013年在英国举行的“阻止杀人机器人”活动场景
我国发展无人装备的几点建议
未來30年,越来越多的人口将居住在城市,大型城市是今后的战略要地,研究城市作战将具有深远的意义。为实现国家战略目的,需要创新城市军事作战概念与模式,自主化无人装备可能就是打开新的战术概念大门的关键钥匙。
我国应就空中和地面自主化无人作战平台展开深入研究,探索能够发挥其优势的作战方式,以及其与士兵协同,如何有效提高部队的整体作战效能。研究自主化无人装备应使其胜任更多复杂的状况,比如独立完成排雷工作,人机混编下顺利区分敌武装分子及平民并实施打击,能引导敌军进入埋伏区域;利用自主化装备绘制地图、区域值守;研究在不利情况下(视野不佳、通信不畅、无法定位)如何有效利用无人装备解决问题;在城市战中联合使用地面与空中自主装备,发挥更大作战效能。
同时,也要认清自主化机器人是一把双刃剑。本文重在构想自主化装备在未来城市战中的积极作用,但不要忽视智能化带来的挑战与未知。
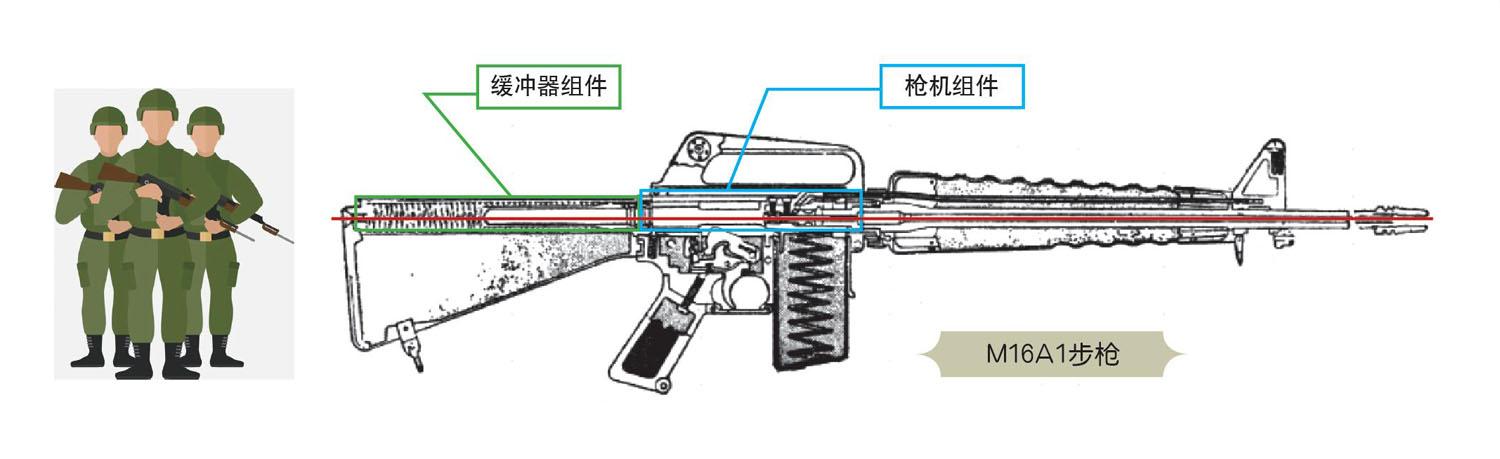
问:AR系的枪托缓冲器/缓冲部件与枪机部件是否在同一轴心上?
答:是的。以AR系中的M16A1为例,红色水平线是枪管的轴线,绿框内是缓冲器组件,蓝框内是枪机组件。AR系采用导气管式自动原理,图中可以看出,M16的枪机上方没有向前延伸出的活塞杆,部件的位置不高,所以枪机的质心较低,与枪管轴线位置基本一致。从位于枪机后面的缓冲器和复进簧同样可以看出,缓冲器的中轴线与枪机、枪管的轴线也是一致的。因此AR系列动作机构的运动质心基本就是沿着枪管轴线运动的。
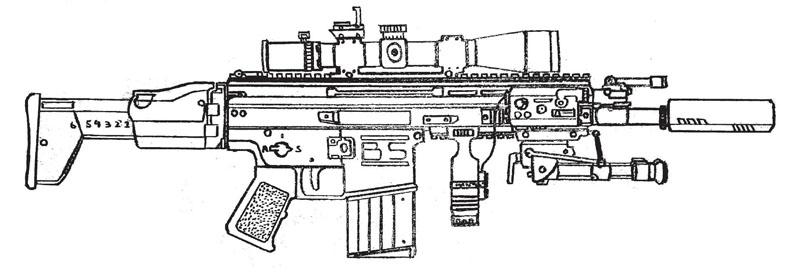
Mk17 STD战斗突击步枪(定制版)
作者的话:我是Mk17(FN SCAR-H) 的忠实爱好者,图中描绘的武器原型为Mk17(FNSCAR-H) STD 型。之所以称它为定制版,是因为我在画枪时为枪加装了消声器、光学瞄具、垂直握把以及两脚架等,所以这是一把具有个人风格的“改装枪”。
